") Apollo軌跡規(guī)劃技術(shù)分享Gitchat,一步幫你把車駛?cè)胝?/h1>
Apollo軌跡規(guī)劃技術(shù)分享Gitchat,一步幫你把車駛?cè)胝?/h1>


聽說你的無人車還不在狀態(tài)?紅黃綠交通燈識(shí)別不當(dāng),障礙物繞了又繞,這里有個(gè)機(jī)會(huì)助力你的車車步入“正軌”!
Apollo軌跡規(guī)劃技術(shù)分享Gitchat,此次分享由百度高級(jí)架構(gòu)師,百度Apollo平臺(tái)規(guī)劃方向技術(shù)負(fù)責(zé)人—Zhang Yajia講解。
軌跡規(guī)劃是無人駕駛系統(tǒng)的核心模塊之一。軌跡規(guī)劃的核心就是要解決車輛該怎么走的問題。軌跡規(guī)劃的輸入包括拓?fù)涞貓D,障礙物及障礙物的預(yù)測(cè)軌跡,交通信號(hào)燈的狀態(tài),還有定位導(dǎo)航(因?yàn)橐滥康牡厥悄牟拍芤?guī)劃路徑)、車輛狀態(tài)等其他信息。而軌跡規(guī)劃的輸出就是一個(gè)軌跡,軌跡是一個(gè)時(shí)間到位置的函數(shù),就是在特定的時(shí)刻車輛在特定的位置上。軌跡規(guī)劃算法的優(yōu)劣直接決定了無人駕駛車的安全性和舒適性,在無人駕駛系統(tǒng)中發(fā)揮著至關(guān)重要的作用。
軌跡規(guī)劃本質(zhì)上來說是一個(gè)優(yōu)化問題。談到優(yōu)化問題,我們需要知道優(yōu)化的約束和優(yōu)化的目標(biāo)。首先看約束,第一個(gè)約束就是車輛要遵守交規(guī),這是強(qiáng)制性的約束;第二個(gè)約束是要避免碰撞;第三個(gè)約束是要使規(guī)劃的軌跡在控制上可實(shí)現(xiàn),不能出現(xiàn)規(guī)劃了一個(gè)急彎的軌跡,車根本拐不過來的狀況。而優(yōu)化的目標(biāo)總的來說就是要跟人開的像,具體表現(xiàn)就是讓人乘坐起來感到舒適,但像人也有不同的優(yōu)化目標(biāo)。
在百度 Apollo 無人駕駛開源平臺(tái)中,軌跡規(guī)劃分為路徑規(guī)劃和速率規(guī)劃兩個(gè)順序過程。路徑規(guī)劃結(jié)合道路邊界線、靜態(tài)障礙物的信息,產(chǎn)生軌跡的幾何信息。速率規(guī)劃在給定的路徑下,考慮動(dòng)態(tài)障礙物的預(yù)測(cè)軌跡、道路限速信息和決策信息,產(chǎn)生安全舒適的速率分配。
除了你,已有800+開發(fā)者Get新技能。本次分享會(huì)除了高質(zhì)量干貨分享,還包括與百度高級(jí)架構(gòu)師,百度Apollo平臺(tái)規(guī)劃方向技術(shù)負(fù)責(zé)人——Zhang Yajia的問答互動(dòng),約等于一對(duì)一的授課,馬上翻開小本本開始做課前準(zhǔn)備。
我們目前從Zhang Yajia的Gitchat中瞄到了兩段:軌跡規(guī)劃的綜述以及無人駕駛的位形與狀態(tài),先與你一起分享。
以下,ENJOY
軌跡規(guī)劃的目標(biāo)是計(jì)算出安全、舒適的軌跡供無人駕駛車輛完成預(yù)定的行駛?cè)蝿?wù)。安全意味著車輛在行駛過程中與障礙物保持適當(dāng)?shù)木嚯x,避免碰撞;舒適意味著給乘客提供舒適的乘坐體驗(yàn),比如避免過急的加減速度,在彎道時(shí)適當(dāng)減速避免過大的向心加速度等等;最后,完成行駛?cè)蝿?wù)指規(guī)劃出的軌跡要完成給定的行駛?cè)蝿?wù),不能因?yàn)檫^于保守的駕駛導(dǎo)致不可接受的行駛時(shí)間。
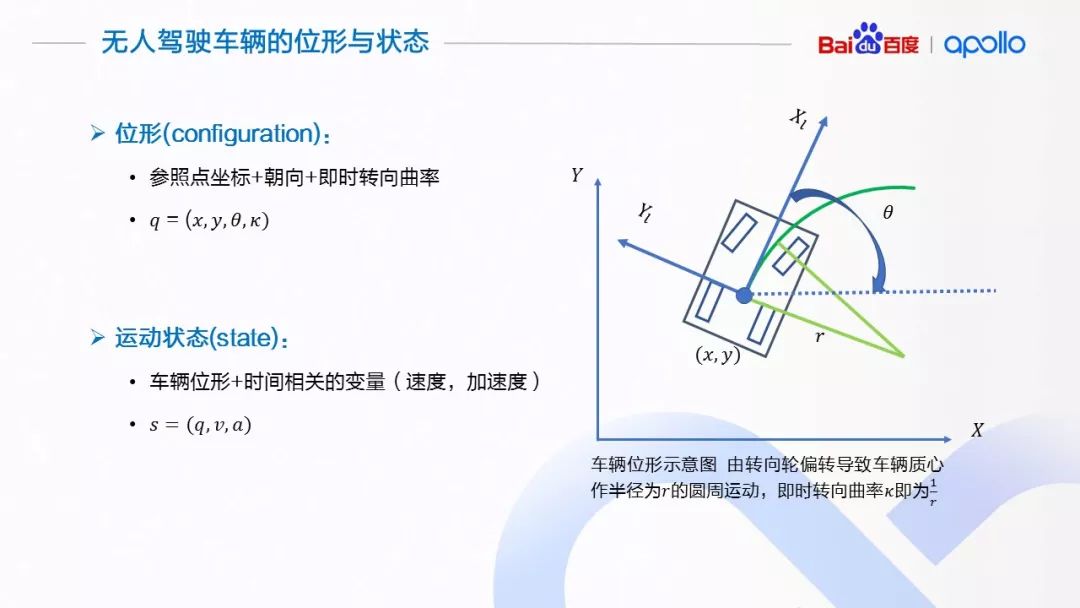
我們這里對(duì)軌跡規(guī)劃問題作正式的定義。首先,我們介紹兩個(gè)機(jī)器人領(lǐng)域的概念:位形(Configuration)是在所研究的規(guī)劃問題中,能夠唯一性的表達(dá)機(jī)器人狀態(tài)的最小一組變量。變量的數(shù)量稱為位形的維度。這里需要注意的是,位形空間的維度,即使對(duì)于同一個(gè)機(jī)器人來講,所研究的問題不同,維度也是不同的。比如,對(duì)一個(gè)人形機(jī)器人來講,如果規(guī)劃問題是在三維空間中移動(dòng),位形需要由參照點(diǎn)的變換矩陣,關(guān)節(jié)的伸展角度組成;如果規(guī)劃問題是作物體的操作(Manipulation Planning),則在前面問題位形空間的基礎(chǔ)上,還要增加機(jī)器人手指關(guān)節(jié)的伸展角度等。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
793文章
14881瀏覽量
179809 -
Apollo
+關(guān)注
關(guān)注
5文章
350瀏覽量
19717
原文標(biāo)題:大咖面對(duì)面 | 一步幫你把車駛?cè)胝?/p>
文章出處:【微信號(hào):Apollo_Developers,微信公眾號(hào):Apollo開發(fā)者社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
虹科答疑 | 如何將數(shù)字模擬信號(hào)映射到CAN/CAN FD報(bào)文?一步到位指南!

BlackBerry QNX與眾森軟件進(jìn)一步深化戰(zhàn)略合作
上汽奧迪與創(chuàng)維汽車智能合作進(jìn)一步深化升級(jí)
Nullmax端到端軌跡規(guī)劃論文入選AAAI 2026
無引導(dǎo)線的左轉(zhuǎn)場(chǎng)景下,自動(dòng)駕駛?cè)绾?b class='flag-5'>規(guī)劃軌跡?

霍爾IC在電動(dòng)車調(diào)速轉(zhuǎn)把中的應(yīng)用與原理
晶圓級(jí)封裝:連接密度提升的關(guān)鍵一步
各位大佬,想問一下為什么這個(gè)程序一步一步運(yùn)行就可以讀出正確的讀數(shù),正常運(yùn)行卻讀不出正確讀數(shù)
CoT 數(shù)據(jù)集如何讓大模型學(xué)會(huì)一步一步思考?

探秘京東外賣幕后:地圖&軌跡技術(shù)探尋
醫(yī)療設(shè)備EMC檢測(cè)測(cè)試整改:保障患者安全的第一步




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論