") 全面解讀自動駕駛的關(guān)鍵組成部分
全面解讀自動駕駛的關(guān)鍵組成部分

本文簡要而全面地概述了自動駕駛汽車(自動駕駛系統(tǒng))的關(guān)鍵組成部分,包括自動駕駛水平、自動駕駛汽車傳感器、自動駕駛汽車軟件、開源數(shù)據(jù)集、行業(yè)領(lǐng)導(dǎo)者、自動駕駛汽車應(yīng)用程序和正在面臨的挑戰(zhàn)。
引言
在過去的十年里,在自動駕駛領(lǐng)域發(fā)表了許多研究論文。然而,它們大多只關(guān)注特定的技術(shù)領(lǐng)域,如視覺環(huán)境感知、車輛控制等。此外,由于自動駕駛汽車技術(shù)的快速發(fā)展,這樣的文章很快就過時了。
在過去的十年中,隨著自動駕駛系統(tǒng)技術(shù)在世界范圍內(nèi)的一系列突破,自動駕駛汽車(自動駕駛系統(tǒng))商業(yè)化的競爭比以往任何時候都更加激烈。例如,2016年,Waymo在亞利桑那州推出了自己的自動駕駛出租車服務(wù),吸引了廣泛的關(guān)注。此外,Waymo花了大約9年的時間開發(fā)和改進(jìn)其自動駕駛系統(tǒng),使用各種先進(jìn)的工程技術(shù),如機(jī)器學(xué)習(xí)和計(jì)算機(jī)視覺。這些前沿技術(shù)極大地幫助他們的無人駕駛汽車更好地理解世界,在正確的時間采取正確的行動。
由于自動駕駛技術(shù)的發(fā)展,近十年來發(fā)表了許多科學(xué)論文,其引用量呈指數(shù)增長,如圖1所示。我們可以清楚地看到,自2010年以來,每年的發(fā)表量和被引用量都在逐漸增加,并在去年達(dá)到了巔峰。
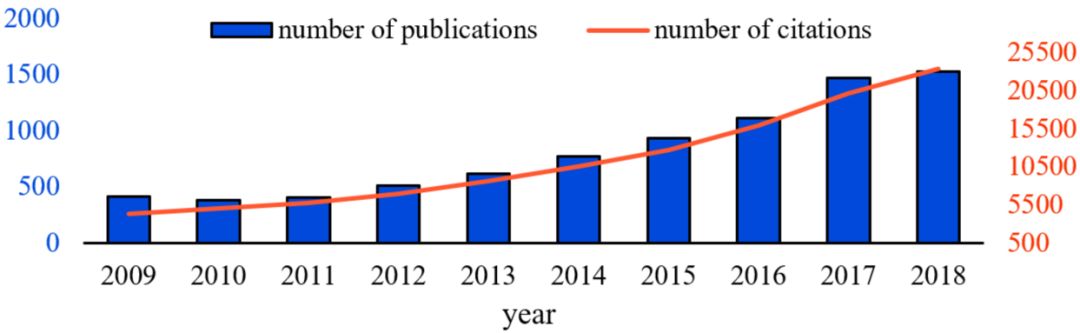
圖1 在過去的十年中,自主駕駛研究的出版物和引文的數(shù)量
一、自動駕駛系統(tǒng)
自動駕駛系統(tǒng)使汽車能夠在沒有人類駕駛員干預(yù)的真實(shí)環(huán)境中運(yùn)行。每個自動駕駛系統(tǒng)由兩個主要組件組成:硬件(汽車傳感器和硬件控制器,即、油門、剎車、車輪等)及軟件(功能組)。
軟件方面,已在多個不同的軟件架構(gòu)中建模,如Stanley (Grand Challenge)、Junior (Urban Challenge)、Boss (Urban Challenge)和同濟(jì)自動駕駛系統(tǒng)。Stanley軟件架構(gòu)包括四個模塊:傳感器接口、感知、規(guī)劃和控制以及用戶界面。Junior軟件體系結(jié)構(gòu)由傳感器接口、感知、導(dǎo)航(規(guī)劃與控制)、線控驅(qū)動接口(用戶接口和車輛接口)和全局服務(wù)五個部分組成。Boss采用三層架構(gòu):任務(wù)、行為和運(yùn)動規(guī)劃。同濟(jì)自動駕駛系統(tǒng)將軟件架構(gòu)劃分為:感知、決策和規(guī)劃、控制和底盤。本文將軟件架構(gòu)劃分為感知、定位與映射、預(yù)測、規(guī)劃與控制五個模塊,如圖2所示,圖2與同濟(jì)自動駕駛系統(tǒng)軟件架構(gòu)非常相似。
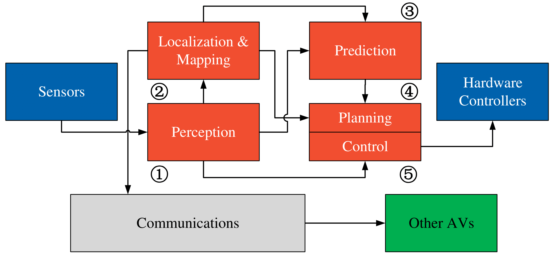
圖2自動駕駛系統(tǒng)軟件構(gòu)架
自動駕駛等級劃分
根據(jù)汽車工程師協(xié)會(SAE international),自動駕駛可以分為六個等級,如表1所示。人類駕駛員負(fù)責(zé)0-2級自動駕駛系統(tǒng)的駕駛環(huán)境監(jiān)測(DEM)。從第4級開始,人類駕駛員不再負(fù)責(zé)動態(tài)駕駛?cè)蝿?wù)回傳(DDTF)。目前,最先進(jìn)的自動駕駛系統(tǒng)主要在2級和3級。業(yè)內(nèi)人士普遍認(rèn)為,要達(dá)到更高等級的自動駕駛水平可能還需要很長一段時間。
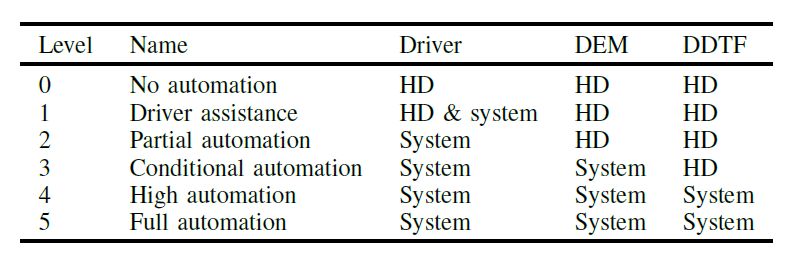
表1
傳感器安裝在自動駕駛系統(tǒng)上的傳感器通常用于感知環(huán)境。選擇每個傳感器是為了權(quán)衡采樣率、視場(FoV)、精度、范圍、成本和整個系統(tǒng)復(fù)雜度。最常用的傳感器有無源傳感器(如攝像頭)、有源傳感器(如激光雷達(dá)、雷達(dá)和超聲波收發(fā)器)和其他傳感器類型,如全球定位系統(tǒng)(GPS)、慣性測量單元(IMU)。
攝像頭通過收集反射到三維環(huán)境對象上的光來捕捉二維圖像。圖像質(zhì)量通常取決于環(huán)境條件,即不同的天氣條件,不同的光照環(huán)境,都會對圖像質(zhì)量產(chǎn)生不同的影響。計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)算法通常用于從捕獲的圖像/視頻中提取有用的信息。
激光雷達(dá)利用脈沖激光照射目標(biāo),通過分析反射脈沖,測量到目標(biāo)的距離。由于激光雷達(dá)具有較高的三維幾何精度,通常用于制作高分辨率的世界地圖。激光雷達(dá)通常安裝在車輛的不同部位以實(shí)現(xiàn)不同的作用,如頂部、側(cè)面和前部。
雷達(dá)通過發(fā)射電磁波并對反射波進(jìn)行分析,可以準(zhǔn)確地測量出目標(biāo)的距離和徑向速度。雷達(dá)特別擅長檢測金屬物體,當(dāng)然雷達(dá)也可以檢測非金屬物體,比如在短距離內(nèi)檢測行人和樹木。雷達(dá)已經(jīng)在汽車工業(yè)應(yīng)用多年,催生了ADAS功能,如自動緊急制動,自適應(yīng)巡航控制等。
與雷達(dá)類似,超聲波傳感器通過測量發(fā)射超聲波信號到接收回波之間的時間來計(jì)算到目標(biāo)的距離,超聲波傳感器通常用于自動駕駛汽車的定位和導(dǎo)航。
GPS是美國政府的一種基于衛(wèi)星的無線電導(dǎo)航系統(tǒng),可以為自動駕駛系統(tǒng)提供時間和地理位置信息。然而,GPS信號很容易被建筑物和山脈等障礙物阻擋,例如所謂的城市峽谷,GPS在此類區(qū)域往往表現(xiàn)不佳。因此,慣性測量單元(IMUs)通常被集成到GPS設(shè)備中,以確保自動駕駛汽車在“城市峽谷”等地的定位。
硬件控制器
自動駕駛汽車硬件控制器包括轉(zhuǎn)矩轉(zhuǎn)向電機(jī)、電子制動助力器、電子節(jié)流閥、變速桿和駐車制動。車輛的狀態(tài),如車輪速度和轉(zhuǎn)向角,可自動感知,并通過控制器區(qū)域網(wǎng)絡(luò)(CAN)總線發(fā)送到計(jì)算機(jī)系統(tǒng)。這使得人類駕駛員或自動駕駛系統(tǒng)能夠控制油門、剎車和方向盤。
二、自動駕駛軟件
感知:感知模塊分析原始傳感器數(shù)據(jù),輸出自動駕駛汽車所處于的環(huán)境理解。這個過程類似于人類的視覺認(rèn)知。感知模塊主要包括對象(自由空間、車道、車輛、行人、道路損壞等)檢測與跟蹤、三維世界重建(利用運(yùn)動結(jié)構(gòu)、立體視覺等)等。最先進(jìn)的感知技術(shù)可以分為兩大類:基于計(jì)算機(jī)視覺和基于機(jī)器學(xué)習(xí)。前者一般通過顯式射影幾何模型來解決視覺感知問題,并使用最優(yōu)化方法尋找最佳解。基于機(jī)器學(xué)習(xí)的技術(shù)通過使用數(shù)據(jù)驅(qū)動的分類/回歸模型(如卷積神經(jīng)網(wǎng)絡(luò))來學(xué)習(xí)給定感知問題的最佳解決方案。SegNet和UNet在語義圖像分割和對象分類方面取得優(yōu)秀的成績。這種神經(jīng)網(wǎng)絡(luò)具有極高的易用性,可以很容易地用于其他類似的感知任務(wù),如遷移學(xué)習(xí)。多傳感器信息融合的感知可以產(chǎn)生更好的理解結(jié)果。
定位和地圖:利用傳感器數(shù)據(jù)和感知輸出,本地化映射模塊不僅可以估計(jì)自動駕駛汽車位置,還可以構(gòu)建和更新三維世界地圖。自從同步定位和地圖(SLAM)的概念在1986年引入以來,就得到了業(yè)內(nèi)人士的普遍關(guān)注。最先進(jìn)的SLAM系統(tǒng)通常分為基于過濾器的SLAM和基于優(yōu)化的SLAM。基于過濾的SLAM系統(tǒng)是由貝葉斯濾波得到的,通常通過增量集成傳感器數(shù)據(jù),迭代估計(jì)自動駕駛汽車姿態(tài)并更新三維環(huán)境地圖。最常用的濾波器有擴(kuò)展卡爾曼濾波器(EKF)、無跡卡爾曼濾波器(UKF)、信息濾波器(IF)和粒子濾波器(PF)。另一方面,基于優(yōu)化的SLAM方法首先通過尋找新觀測值與地圖之間的對應(yīng)關(guān)系來識別問題約束。然后,計(jì)算和改進(jìn)自動駕駛汽車的姿勢,并更新3D地圖。基于優(yōu)化的SLAM方法可以分為兩個主要分支:Bundle Adjustment (BA)和graph SLAM。前者利用高斯-牛頓法、梯度下降等優(yōu)化技術(shù),通過最小化誤差函數(shù),聯(lián)合優(yōu)化三維地圖和攝像頭姿態(tài)。后者將定位問題建模為一個圖形表示問題,并通過尋找不同車輛姿態(tài)的誤差函數(shù)來求解。
預(yù)測:預(yù)測模塊分析其他交通代理的運(yùn)動模式,預(yù)測自動駕駛汽車未來的運(yùn)動軌跡,使自動駕駛汽車能夠做出合適的導(dǎo)航?jīng)Q策。目前的預(yù)測方法主要分為兩大類:基于模型的預(yù)測方法和基于數(shù)據(jù)驅(qū)動的預(yù)測方法。前者根據(jù)基本的物理系統(tǒng)運(yùn)動學(xué)和動力學(xué),通過傳播其運(yùn)動狀態(tài)(位置、速度和加速度)來計(jì)算自動駕駛汽車未來的運(yùn)動。例如,奔馳的運(yùn)動預(yù)測組件使用地圖信息作為約束來計(jì)算自動駕駛汽車的下一個位置。卡爾曼濾波在短期預(yù)測方面表現(xiàn)良好,但在長期預(yù)測方面表現(xiàn)不佳,因?yàn)樗雎粤酥車沫h(huán)境,比如道路和交通規(guī)則。在此基礎(chǔ)上,建立了基于引力和斥力的行人運(yùn)動預(yù)測模型。近年來,隨著人工智能和高性能計(jì)算的發(fā)展,許多數(shù)據(jù)處理技術(shù),如隱馬爾可夫模型(HMM)、貝葉斯網(wǎng)絡(luò)(BNs)和高斯過程(GP)回歸,用來預(yù)測自動駕駛汽車狀態(tài)。近年來,研究人員利用逆強(qiáng)化學(xué)習(xí)(IRL)對環(huán)境進(jìn)行建模,比如,采用逆最優(yōu)控制方法對行人路徑進(jìn)行預(yù)測。
規(guī)劃:規(guī)劃模塊根據(jù)感知、定位、映射以及預(yù)測信息確定可能的安全自動駕駛汽車導(dǎo)航路徑。規(guī)劃任務(wù)主要分為路徑規(guī)劃、機(jī)動規(guī)劃和軌跡規(guī)劃。路徑是自動駕駛汽車應(yīng)該遵循的幾何路徑點(diǎn)列表,以便在不與障礙物碰撞的情況下到達(dá)目的地。最常用的路徑規(guī)劃技術(shù)有:Dijkstra、動態(tài)規(guī)劃、A*、狀態(tài)格等。機(jī)動規(guī)劃是一個高層次的自動駕駛汽車運(yùn)動表征過程,因?yàn)樗瑫r考慮了交通規(guī)則和其他自動駕駛汽車狀態(tài)。在找到最佳路徑和機(jī)動規(guī)劃后,必須生成滿足運(yùn)動模型和狀態(tài)約束的軌跡,這樣才能保證交通的安全性和舒適性。
控制:控制模塊根據(jù)預(yù)測的軌跡和估計(jì)的車輛狀態(tài)向油門、剎車或轉(zhuǎn)向扭矩發(fā)送適當(dāng)?shù)拿睢?刂颇K使汽車盡可能接近計(jì)劃的軌跡。控制器參數(shù)可以通過最小化理想狀態(tài)和觀測狀態(tài)之間的誤差函數(shù)(偏差)來估計(jì)。比例積分導(dǎo)數(shù)(PID)控制、線性二次調(diào)節(jié)器(LQR)控制和模型預(yù)測控制(MPC)是最常用的最小化誤差函數(shù)的方法。PID控制器是一種利用比例項(xiàng)、積分項(xiàng)和導(dǎo)數(shù)項(xiàng)使誤差函數(shù)最小的控制回路反饋機(jī)構(gòu)。當(dāng)系統(tǒng)動力學(xué)用一組線性微分方程表示,成本用二次函數(shù)表示時,利用LQR控制器使誤差函數(shù)最小化。MPC是一種基于動態(tài)過程模型的先進(jìn)過程控制技術(shù)。這三種控制器各有優(yōu)缺點(diǎn)。自動駕駛汽車控制模塊一般采用上述方法的混合模式。例如,初級自動駕駛汽車使用MPC和PID來完成一些低級反饋控制任務(wù),例如應(yīng)用變矩器來實(shí)現(xiàn)所需的車輪轉(zhuǎn)角。百度Apollo采用了這三種控制器的混合的模式:PID用于前饋控制、LQR控制輪角、MPC對PID和LQR控制器參數(shù)進(jìn)行優(yōu)化。
三、開源數(shù)據(jù)集
在過去的十年中,已經(jīng)公布了很多開源數(shù)據(jù)集,這為自動駕駛研究做出了巨大貢獻(xiàn)。小編搜集了幾種使用最多的數(shù)據(jù)集,并簡要說明各種數(shù)據(jù)集的用途。Cityscapes包含一個大規(guī)模的數(shù)據(jù)集,可以用于像素級和實(shí)例級的語義圖像分割。ApolloScape可用于各種自動駕駛汽車感知任務(wù),如場景解析、汽車實(shí)例理解、車道分割、自定位、軌跡估計(jì)以及目標(biāo)檢測和跟蹤。此外,KITTI提供了用于立體和流量估計(jì)、目標(biāo)檢測和跟蹤、道路分割、里程估計(jì)和語義圖像分割的可視化數(shù)據(jù)集。6D-vision使用立體攝像機(jī)感知三維環(huán)境,提供立體、光流和語義圖像分割的數(shù)據(jù)集。
四、行業(yè)領(lǐng)導(dǎo)者
最近,投資者開始把錢投向自動駕駛系統(tǒng)商業(yè)化競賽潛力股。自2016年以來,特斯拉的估值一直在飆升。這使得承銷商推測,該公司將在幾年內(nèi)產(chǎn)生一支自動駕駛車隊(duì)。此外,自2017年報道通用汽車計(jì)劃制造無人駕駛汽車以來,該公司股價已經(jīng)上漲了20%。截止2018年7月,Waymo已經(jīng)在美國對其自動駕駛汽車進(jìn)行了800萬英里的測試。在2018年度,通用汽車和Waymo事故最少:通用汽車在212公里以上發(fā)生了22次碰撞,而Waymo在563公里以上只發(fā)生了3次碰撞。除了行業(yè)巨頭,世界一流大學(xué)也加快了自主駕駛的發(fā)展。這些大學(xué)都很好地開展了產(chǎn)學(xué)研相結(jié)合的模式。這使高校更好地為企業(yè)、經(jīng)濟(jì)和社會做出貢獻(xiàn)。
應(yīng)用場景:自動駕駛技術(shù)可以應(yīng)用于任何類型的車輛,如出租車、長途汽車、旅游巴士、貨車等。這些交通工具不僅可以使人們從勞動密集型和單調(diào)乏味的工作中解脫出來,而且可以確保他們的安全。例如,配備自動駕駛技術(shù)的道路質(zhì)量評估車輛可以修復(fù)檢測到的道路損傷。此外,使用自動駕駛技術(shù),道路參與者可以相互溝通,公共交通將更加高效和安全。
五、現(xiàn)存挑戰(zhàn)
盡管自動駕駛技術(shù)在過去的十年中發(fā)展迅速,但仍然存在許多挑戰(zhàn)。例如,感知模塊在惡劣的天氣和/或光照條件下或在復(fù)雜的城市環(huán)境中表現(xiàn)不佳。此外,大多數(shù)感知方法通常是計(jì)算密集型的,不能在嵌入式和資源有限的硬件上實(shí)時運(yùn)行。此外,由于長期不穩(wěn)定性,目前SLAM方法在大規(guī)模實(shí)驗(yàn)中的應(yīng)用仍然有限。另一個重要的問題是如何融合自動駕駛汽車傳感器數(shù)據(jù),以快速、經(jīng)濟(jì)的方式創(chuàng)建更準(zhǔn)確的三維語義詞。此外,人們何時才能真正接受自動駕駛和自動駕駛汽車,仍然是一個值得討論話題,由此也引發(fā)了嚴(yán)重的倫理問題的探討。
-
傳感器
+關(guān)注
關(guān)注
2576文章
55032瀏覽量
791252 -
自動駕駛
+關(guān)注
關(guān)注
793文章
14880瀏覽量
179800
原文標(biāo)題:技術(shù)、方法、軟件、行業(yè)領(lǐng)導(dǎo)者——全面解讀自動駕駛的關(guān)鍵組成部分
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
TomTom Orbis地圖將為CARIAD的自動駕駛系統(tǒng)提供支持
自動駕駛汽車如何完成超車?

自動駕駛汽車如何實(shí)現(xiàn)自動駕駛

Transformer如何讓自動駕駛大模型獲得思考能力?
如何設(shè)計(jì)好自動駕駛ODD?
超聲波傳感器線圈:自動駕駛實(shí)現(xiàn)精確實(shí)時近距離感知的關(guān)鍵
不同等級的自動駕駛技術(shù)要求上有何不同?
卡車、礦車的自動駕駛和乘用車的自動駕駛在技術(shù)要求上有何不同?


自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角

劉強(qiáng)東,進(jìn)軍汽車領(lǐng)域# 京東# 自動駕駛# 自動駕駛出租車# 京東自動駕駛快遞車
什么是物聯(lián)網(wǎng)智慧路燈?智慧路燈有哪些組成部分?

理想汽車推出全新自動駕駛架構(gòu)
激光雷達(dá)技術(shù):自動駕駛的應(yīng)用與發(fā)展趨勢




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論