 Apollo開發套件加速自動駕駛研發
Apollo開發套件加速自動駕駛研發

百度Apollo自動駕駛開發套件是全球首款自動駕駛開發套件,也是國內首個適配Apollo整套硬件傳感器的自動駕駛硬件集成平臺。
結合百度Apollo的自動駕駛框架和軟件算法模塊,套件可為自動駕駛開發者提供一套包括“硬件+軟件算法”在內的一站式研發驗證解決方案。
希望通過自動駕駛技術實現一個愿景,即通過自動駕駛及智能交通讓城市更智能,還路于民、人車分離,讓生活更美好。但是實現這樣一個愿景,其實是非常難的,是一個極其復雜的工程。
自動駕駛部署的整體硬件架構
這是自動駕駛部署的整體硬件架構,基本上分為三大模塊:感知、決策和控制。這些模塊除了算法軟件上的迭代,更主要的還會通過車輛部署的硬件去完成。以感知為例,包含通過慣性導航、定位系統實現對車輛運動的監控,激光雷達、攝像頭感知以及V2X等完成對環境的感知。這些傳感器和執行都通過計算單元的進行決策,決策結果下發到控制機構,由車輛的控制機構去完成自動轉向、油門驅動、制動等動作。
典型的L4自動駕駛傳感器配置如下圖所示,包括激光雷達、毫米波雷達、攝像頭和組合導航,最后都需要做傳感器之間的標定和融合。
典型L4自動駕駛傳感器
下面簡要介紹主要硬件的工作原理。
激光雷達
激光雷達使用的技術是飛行時間法(Time of Flight),根據光線遇到障礙物的折返時間計算距離。為了覆蓋一定角度范圍需要進行角度掃描,從而出現了各種掃描原理。主要分為:同軸旋轉、棱鏡旋轉、MEMS掃描、相位式、閃爍式。激光雷達不光用于感知也應用于高精度地圖的測繪和定位,是L4級別自動駕駛公認的必不可少的傳感器。
攝像頭主要用于車道線、交通標示牌、紅綠燈以及車輛、行人檢測,有檢測信息全面、價格便宜的特點,但會受到雨雪天氣影響。由鏡頭、鏡頭模組、濾光片、CMOS/CCD ISP、數據傳輸組成。光線經過光學鏡頭和濾光片后聚焦到傳感器上,通過CMOS或CCD集成電路把光信號轉換成電信號,再經過圖像處理器(ISP)轉換成標準的RAW,RGB或YUV等格式的數字圖像信號,通過數據傳輸接口傳到計算機端。
用于自動駕駛的雙目攝像頭是通過對兩幅圖像視差的計算,直接對圖像拍攝范圍內的前方景物進行距離測量,而無需判斷障礙物類型。所以對于任意類型的障礙物,都能根據距離信息的變化進行必要的預警或制動。
GNSS板卡通過天線接收所有可見GPS衛星和RTK的信號后進行解譯和計算得到自身的空間位置。當車輛通過遂道或行駛在高聳的樓群間的街道時,這種信號盲區由于信號受遮擋而不能實施導航的風險。就需要融合慣性導航系統 的信息,慣性導航具有全天候、完全自主、不受外界干擾、可以提供全導航參數(位置、速度、姿態)等優點,兩者組合之后能達到比兩個獨立運行的最好性能還要好的定位測姿性能。
感知位置-組合導航
自動駕駛需要根據傳感器數據進行計算,實現控制和決策。Apollo計算選用的載體通常是IPC即工業個人計算機(Industrial Personal Computer─IPC)是一種加固的增強型個人計算機,它可以作為一個工業控制器在工業環境中可靠運行。
實際上,現在Apollo平臺推薦工控機的規格和參數,推薦配置是1080的顯卡和E3或E5的CPU。當然,目前這種集中式的架構,將所有的計算工作統一放到一個工控機中,整體體積較大,功耗高,采用的CPU+GPU的框架也不滿足車規級的要求,不適用于未來的量產。但這種架構非常方便算法迭代不需要過度考慮硬件的整體設計,用傳統的X86架構就可以非常快捷的搭建出計算平臺,卡槽設計也方便硬件的更新和算力的拓展。
自動駕駛大腦-計算單元
自動駕駛主要分為感知,決策,控制三部分,控制層是自動駕駛落地的基礎。感知定位如同司機的眼睛,決策規劃如同大腦,執行控制就好比手和腳。做好自動駕駛的決策規劃也必須懂得執行控制,為了實現自動駕駛執行機構的線控化是必然趨勢,其中包括線控制動、線控轉向、線控油門。
自動駕駛執行機構的線控化
面向量產的自動駕駛汽車必須對車輛的傳統執行機構進行電子化改造,升級為具有外部控制協議接口的線控執行部件系統。“汽車的底層線控系統一般都是封閉的,整車廠和Tier1(一級供應商,產品直接供應整車廠的汽車零部件供應商)不會輕易對外部開放。”
從上面的描述可以看出,自動駕駛一個極其復雜的工程。對于自動駕駛開發者來說門檻還比較高。目前,百度和國內多家高校發起籌建新工科智能駕駛工委會,以自動駕駛的專業方向來看,需要國內高校分別跨專業跨學科一起建設,才能把自動駕駛做得更好。
自動駕駛開發工程
為了能夠給廣大自動駕駛開發者、從業者提供更多的便利,推動自動駕駛的快速發展,降低門檻。百度從2012年、2013年就開始對自動駕駛技術進行積累,在2017年開放開源,是希望Apollo平臺能夠降低整個自動駕駛行業的門檻,讓大家更便捷地獲取自動駕駛的一些能力。
通常,大家先對自動駕駛技術進行離線開發,如果要達到實車有幾個選擇。一個就是我們剛才介紹的林肯的MKZ的乘用車改造,最大的問題就是成本很高,動輒整車改造下來基本上要上百萬左右,并且國家對于自動駕駛的測試法規的完善及要求,除非有專用的測試廠,基本上很難有環境去很好地完成自動駕駛的測試。
另外一種思路是圖最右側介紹的一些模型車。模型車就像樂高機器人一樣,很好上手,但是它的問題是真實性會太差,在這樣小車上驗證的方案,無論是控制、感知都很難復用到真實的汽車自動駕駛上的。
更合適的自動駕駛開發套件
因此,百度選擇了一個低速微型車來做Apollo驗證。因為Apollo所有的技術積累都是來源于早期乘用車、轎車的自動駕駛,所以它是必須對標這類車輛平臺才能去做。另外,能夠在短期以內規模化應用還是以低速的小型車輛為主。基于這樣的理念,設計了一款「更適合」的自動駕駛開發套件。
Apollo D-Kit線控底盤
該開發套件采用純電線控底盤,懸架形式采用了整體橋+拖曳臂的形式,在能夠完全適配Apollo線控標準的情況下,我們能夠基于它生成車輛適配代碼及標定參數,降低標定的工作難度。
此外,為了便于自動駕駛調度或者測試接管以及保障安全,選擇了用搖控器進行調度、接管,底層傳感器還支持碰撞即停的安全功能。Apollo 開發套件有一個很有趣的設計,設計換電方案,打開艙門把電池取出來,再插上新的電池,又可以做下一輪新的研發。
上裝結構平臺采用輕量化桁架結構,預留了傳感器擴展孔位。從設計角度來看,美觀程度可能不如說很多自動駕駛小車。這么做的目的是為了讓它更適合開發,總體設計思路是希望它能夠便于調試應用。
上裝傳感器結構平臺
該開發套件本身來說,完善程度沒有那么高。但是它目前的配置能夠完成基礎的L4級別自動駕駛認證。更為重要的是,它的上裝設計能夠持續優化硬件。例如,對于二次開發來說,基于這個開發平臺,開發者能夠在拓展性上去做一些二次開發,一些更新的技術方案可以很快應用到開發套件上進行驗證。
具備二次開發拓展性的上裝設計
另外除了選型上的拓展,該套件能在結構上做一些拓展。左下角是同一個底盤,在標準套間所采用的桁架設計的基礎上,如果有足夠的集成能力和結構化能力,也可以做成左下角用于物流配送的上裝結構。包括增加例如人機交互、機械控制等前沿方向的功能。
Apollo社區內的自動駕駛應用
在整個Apollo社區里,已經持續涌現出一些自動駕駛應用,像復旦大學的校園配送車,海南大學的校園接駁車,新石器的新零售車等。我們想做的事是希望能夠持續地降低Apollo自動駕駛開發平臺門檻,打造一個都能夠實現的自動駕駛平臺,在這個基礎上,歡迎大家基于我們的開發套件,能夠持續拓展,并給Apollo開源社區貢獻一些更新的東西。
-
百度
+關注
關注
9文章
2384瀏覽量
95141 -
自動駕駛
+關注
關注
794文章
14953瀏覽量
181110
原文標題:沙龍回顧丨Apollo 開發套件加速自動駕駛研發
文章出處:【微信號:Apollo_Developers,微信公眾號:Apollo開發者社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
全新Altera Agilex開發套件正式發布

如何設計好自動駕駛ODD?
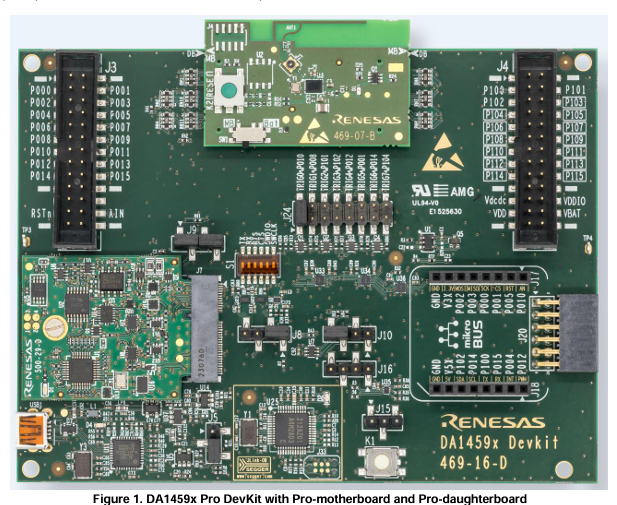
DA14535 USB開發套件硬件解析:開啟低功耗藍牙開發新征程
特斯拉的“哨兵模式”為何被告?解析自動駕駛隱私保護出路

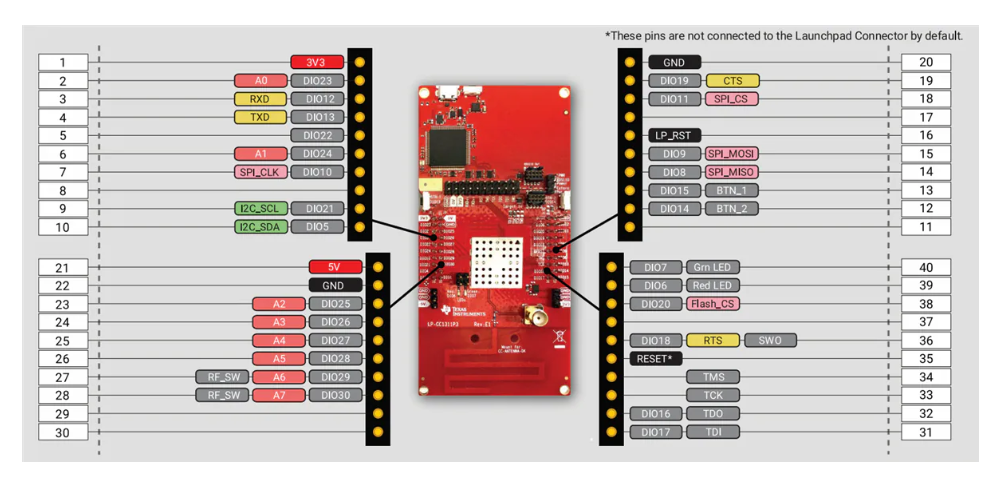
?TI CC1311P3 LaunchPad?開發套件技術解析與應用指南
2025百度Apollo星火自動駕駛大賽成功舉辦
太陽光模擬器 | 在汽車自動駕駛開發中的應用

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

百度Apollo向北京工商大學捐贈自動駕駛車輛
DA14594 BLE Pro開發套件 開源 (原理圖+BOM+PCB)
自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統視角




 工商網監
工商網監
評論