 針對端到端自主駕駛模型的簡單對抗實例
針對端到端自主駕駛模型的簡單對抗實例

AI狂想
AI領域正在向兩個不同的方向發展,一種是小微型計算,另一種則是巨型計算。
本周熱門學術研究
針對端到端自主駕駛模型的簡單對抗實例
在開發多功能建模框架和模擬基礎設施來研究端到端自動駕駛模型的對抗性范例的過程中,研究人員發現,一些十分簡單且易于設計的物理條件,會對自動駕駛模型產生一定的對抗性。例如道路上的標記線就能夠打破端到端駕駛模型的穩定。
這些范例的對抗性有在很多情況下并不會呈現很強的干擾性,比如直線行駛的時候,但在諸如車輛轉彎的其他情況下,則會體現出很強的干擾性。
盡管對于人類來說,區分和避免此類沖突是十分簡單的,但對于端到端監視模型而言,這些干擾將造成嚴重的交通違規問題。在測試和實驗中,研究人員使用了CARLA自動駕駛汽車模擬器,證明這些物理擾亂不僅存在,而且在特定的駕駛情況下甚至對于最先進的模型也有相當強的作用。
潛在應用及影響
智能機器學習系統極易受到干擾的問題引發了廣泛的擔憂。這些研究成果及其理論框架無疑為以后的研究提供了有用的信息,并揭示了端到端深度學習模型的缺陷,便于日后改進。此外,該研究也為人工智能工程師們進一步探索更大范圍內深度學習模型可能遭受的攻擊提供了重要的見解。
原文:
https://arxiv.org/abs/1903.05157
綜合教學視頻分析數據集(COIN數據集)
為了解決教學視頻數據集缺乏多樣性和規模的問題,研究人員最近推出了COIN數據集,該數據集是現在用于綜合教學視頻分析的最大的視頻數據集。
該數據集以分層結構組織,包括大約11827個視頻,廣泛涵蓋了日常生活10個以上領域的180個課題 。 COIN數據集中的所有視頻都進行了一系列專業注釋。 此外,研究人員還提出了一個簡單有效的方法,可用于捕獲不同描述階段的數據依賴性。這類方法還可同傳統方法相結合,以更好地提取教學視頻中的關鍵步驟。
潛在應用及影響
研究人員對于COIN數據集的創建目的十分明確 ——通過豐富的語義分類來建立綜合全面的教學視頻數據集,為教學視頻分析提供基準。通過COIN的建立,研究人員也希望推動AI社區未來對教學視頻分析的深入研究。
COIN數據集:
https://coin-dataset.github.io/
原文:
https://arxiv.org/abs/1903.02874v1
不犧牲準確性的量化
通常情況下,量化會降低模型精度。 盡管如此,研究人員依舊致力于通過改進量化技術,從而減少量化過程中精確度的降低。在最近的一篇論文中,他們提出了一種可以有效地量化模型權重的聚焦量化技術。
論文中所提出的量化方法使用高斯混合表示來定位模型權重分布中的高概率區域,并且以精細水平量化它們。 此外,這一量化技術僅使用-2的冪來提供有效的計算模式。
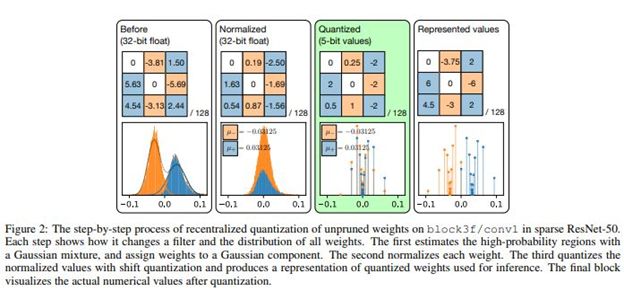
通過一系列整合修剪和編碼,他們已經設法在各種CNN上展示出高端壓縮比。 例如,它們在ResNet-50中達到18.08×的壓縮比,在模型精度方面的損失僅為可以忽略不計的0.24%,超過了當前的壓縮技術。
潛在應用及影響
與深度神經網絡的量化計算集成的量化參數,具有極高的實現大量計算增益和優化性能的能力。 該論文所提出的聚焦量化可以使模型尺寸和計算成本降低,并轉化為高壓縮比,同時提高了當前和未來CNN的效率。
原文:
https://arxiv.org/abs/1903.03046v1
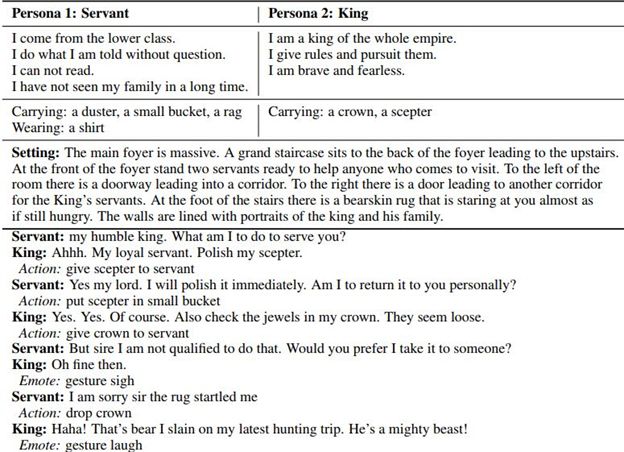
LIGHT:在幻想文本冒險游戲中學習說話和行動
想象一下,如果有一款游戲,多個計算機和人類都可以充當游戲角色,這樣的游戲會是什么樣呢?研究人員最近推出了這樣一款幻想文本冒險游戲,玩家可以在與多個玩家建立對話的同時,進行識、行動和表達等互動。
現有的文字冒險游戲通常是單人的,并且玩家無法在游戲中與人類進行對話,這就是為什么我覺得這個游戲聽起來很有趣和有冒險性。
在人與文本的交互游戲中學習(LIGHT),是一款多玩家的幻想文本冒險游戲,旨在幫助機構研究人類間多方面的動態協作對話。
該文本類的游戲設定于一個內涵豐富的游戲世界,其中包括超過660個位置,3460個對象和僅以自然語言定義的1750個字符。研究人員已經收集了大量的數據集(11k集),這些數據集涉及行為,表達和對話等角色驅動的人與人之間的相互作用,其目的是訓練模型以類似的方式吸引人類。
測試結果表明,在此條件下訓練、生成和檢索模型可以有效地利用游戲世界的潛在條件或規則來調節他們的預測。
潛在應用及影響
LIGHT提供了一個可用于在許多不同的任務中共享,培訓和評估協作對話模型的統一平臺,使人們能夠以有趣的方式與機器進行交互。 該框架通過提供合適的研究平臺,允許研究機構進行多種協作和學習,從而研究和增強現有的協作對話系統。 研究人員希望這項工作能夠進一步促進和推動基礎語言學習的研究工作。
官網:
http://parl.ai/
原文:
https://arxiv.org/abs/1903.03094v1
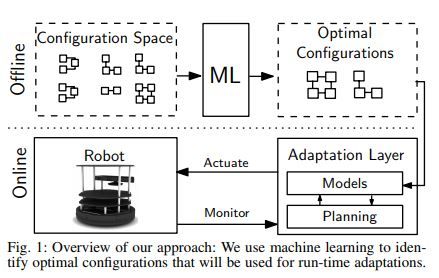
利用機器學習實現自動機器人的自適應
研究人員提出了一種綜合學習和定量規劃的方法,其主要目標是在機器人系統等動態和不確定環境中運行的高度可配置系統中實現自適應。該技術使用配置更改作為實施適應的主要機制。
該方法的創新之處在于,它應用機器學習來發現帕累托最優配置,而無需探索所有配置,并將搜索空間的限制應用于可控計劃的特定設置。通過這種方式,它可以將學習和定量計劃結合起來,以實現運行時的自適應。
此外,該方法有助于在定量規劃中整合來自多個模型的信息。具體來說,研究人員探索了需要考慮時間和能量消耗的機器人操作。獨立的評估表明,該方法在不確定和動態環境中產生了高質量的適應過程。
潛在應用及效果
作為一種能夠有效實現機器人自適應的集成學習和定量規劃方法的新技術,該方法可用于許多其他網絡物理系統。此外,它還可以作為在線界面擴展到運行時模型更新的界面中。
原文:
https://arxiv.org/abs/1903.03920
其他爆款論文
最近的研究表明,通過演示,你現在可以教機器人完成兩個不同的清潔任務。
原文:
https://arxiv.org/abs/1903.05635
在允許可靠的攝像機姿態估計時,如何避免在拍攝的3D場景上泄露機密信息?最近的一項研究提出了一種基于圖像的隱私保護定位解決方案。
原文:
https://arxiv.org/abs/1903.05572
谷歌推出了一個新的開放源碼庫,可以有效地訓練巨型神經網絡。
網頁:
https://ai.googleblog.com/2019/03/introducing-gpipe-open-source-library.html
以下是基于實例和類別級別的6D對象姿態估計,用于增強現實、機器人控制和導航等應用。
原文:
https://arxiv.org/abs/1903.04229
想知道如何在生物醫學文本中總結和發現有意義的概念嗎?
原文:
https://arxiv.org/abs/1903.02861v1
AI新聞
谷歌發布了一種基于神經網絡的端到端語音識別器,以支持最先進的語音識別。
更多信息:
https://ai.googleblog.com/2019/03/an-all-neural-on-device-speech.html
研究人員的好消息:Deep Mind開發了一個開源軟件庫來幫助他們部署TensorFlow模型。
-
人工智能
+關注
關注
1817文章
50098瀏覽量
265395 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179894 -
深度學習
+關注
關注
73文章
5599瀏覽量
124398
原文標題:最大綜合教學視頻數據集發布,道路標記線會擾亂自動駕駛穩定性 | AI一周學術
文章出處:【微信號:BigDataDigest,微信公眾號:大數據文摘】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛端到端為什么會出現黑盒現象?

Nullmax感知規劃端到端大模型進化提速
如何訓練好自動駕駛端到端模型?

自動駕駛中“一段式端到端”和“二段式端到端”有什么區別?


端到端發展趨勢下,云算力如何賦能智能駕駛技術躍遷?

自主工具鏈助力端到端組合輔助駕駛算法驗證

Nullmax端到端自動駕駛最新研究成果入選ICCV 2025

為什么自動駕駛端到端大模型有黑盒特性?

Momenta端到端飛輪大模型開啟智能輔助駕駛行車體驗

自動駕駛中基于規則的決策和端到端大模型有何區別?

DiffusionDrive首次在端到端自動駕駛中引入擴散模型




 工商網監
工商網監
評論