") MIT和微軟的新成果助力自動(dòng)駕駛擺脫成長的煩惱!
MIT和微軟的新成果助力自動(dòng)駕駛擺脫成長的煩惱!

自動(dòng)駕駛的發(fā)展,既不像大眾期待的那種“一步跨進(jìn)自動(dòng)化”,也不像唱衰者眼中那么凄風(fēng)苦雨,要等數(shù)十年才能信任AI駕駛。在振蕩中前進(jìn),才是AI進(jìn)入生活最真實(shí)的樣子。
市場運(yùn)力嗷嗷待哺,科技公司和汽車廠商們前赴后繼揮金如土,無人車路測也早已不是什么新鮮事,但自動(dòng)駕駛的到來卻沒有想象中那么一蹴而就。至少這兩年,它的煩心事還挺多。
在美國無人車政策最友好的亞利桑那州,兩年間就發(fā)生了至少21起民眾騷擾自動(dòng)駕駛車輛和安全員的事件,甚至還有人持槍嚇唬安全員,要求無人車滾出街區(qū)。
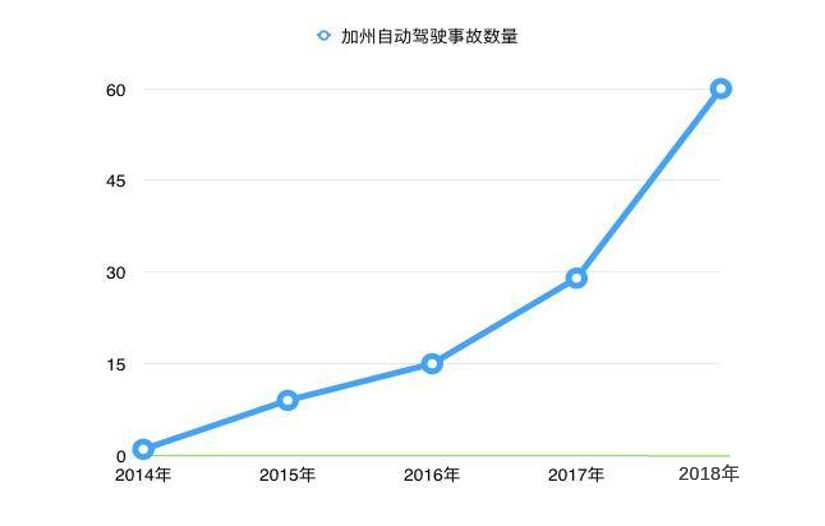
之所以犯了眾怒,根本原因還是技術(shù)性失敗太多了。數(shù)據(jù)顯示,2014-2018年,加州自動(dòng)駕駛事故的發(fā)生率連年增長,谷歌Waymo、通用Cruise、蘋果、TRI(豐田研究所)、Drive.ai、UATC(Uber)等巨頭一個(gè)都沒能幸免。
縱然謹(jǐn)小慎微,依舊動(dòng)輒得咎,無人車表示心里很苦。
經(jīng)過數(shù)年的發(fā)展,自動(dòng)駕駛的感知技術(shù)已經(jīng)取得了長足的發(fā)展,高精度傳感器和攝像頭早就是標(biāo)配。技術(shù)困境中的自動(dòng)駕駛,恐怕需要一個(gè)更天秀的決策系統(tǒng),來挽救自己日漸失去的人心。
而最近,這個(gè)救世英雄好像真的出現(xiàn)了。
防無人車甚于防川?
自動(dòng)駕駛的老問題與新解法
從加州機(jī)車輛管理局(DMV)剛剛披露的《2018年自動(dòng)駕駛接管報(bào)告》中,我們可以得出一個(gè)基本結(jié)論:
自動(dòng)駕駛初級階段的基本矛盾,是人民日益增長的自動(dòng)化期待值同落后的無人車駕駛技術(shù)之間的矛盾。
事實(shí)證明,盡管原本對無人車認(rèn)路造成限制的空間感知能力已經(jīng)大大增強(qiáng),也沒能幫助它們很好地適應(yīng)現(xiàn)實(shí)世界。這也就不能怪大眾對無人車上路沒啥好臉色了。
像是惡名昭著的“Uber 無人車事件”,就是在探測到行人的前提下,系統(tǒng)卻認(rèn)為當(dāng)前的位置不足以阻擋正常的駕駛行為,于是選擇了以61公里的時(shí)速繼續(xù)前進(jìn),沒能留下足夠的反應(yīng)時(shí)間。
明明已經(jīng)在實(shí)驗(yàn)室里接受過“遇到障礙物主動(dòng)剎車”的培訓(xùn)了,但真正上路時(shí),做出準(zhǔn)確而符合邏輯的判斷,對自動(dòng)駕駛汽車來說依然是一件相當(dāng)有難度的事情。
“心太大”容易釀成事故,太“肉”也有可能成為眾矢之的。鳳凰城里,Waymo在每個(gè)有停車標(biāo)志的地方都會(huì)停車至少三秒鐘,讓排在它后面的人類司機(jī)十分抓狂,沒少受市民的吐槽。
目前看來,能為自動(dòng)駕駛汽車挽尊的,只有風(fēng)控和效率兩手抓的決策系統(tǒng)了。
但遺憾的是,很多現(xiàn)實(shí)中人類可以輕松處理的交通狀況,機(jī)器就是無法做出準(zhǔn)確、高效又足夠謹(jǐn)慎的判斷。因此,自動(dòng)駕駛在很長一段時(shí)間內(nèi),還要依靠人工操作來彌補(bǔ)系統(tǒng)智商與人類期望之間的差距了。人工接管頻率也因此成為了評價(jià)自動(dòng)駕駛技術(shù)最重要的指標(biāo)。
根據(jù)DMV的報(bào)告,技術(shù)最出色的Waymo,平均跑17846.8公里才需要人工接管一次;而被吊銷了路測資格證的Uber,跑0.6公里就要被接管一次,這是想累死自家的安全員呀!

在一份谷歌提交的報(bào)告中,14個(gè)月的路測中自動(dòng)駕駛和汽車就有272次汽車主動(dòng)脫離無人駕駛狀態(tài),還有69次安全員決定接過控制權(quán)。谷歌表示,如果沒有安全員的介入,無人車可能會(huì)發(fā)生13次交通碰撞事故。
在這種情況下,加州不得不規(guī)定,未來所有無人自動(dòng)駕駛汽車公司都要設(shè)立遠(yuǎn)程人工控制室,在意外情況時(shí)能夠接管汽車駕駛工作。
但如果以為只要有人類接管就能萬事大吉,那可就太天真了。且不論未來全靠人工來解決無人車的意外問題,需要多么龐大的人工成本。就自動(dòng)駕駛汽車現(xiàn)在這智商,讓它獨(dú)自上路,就算能在云端看著也不放心啊。
治本的辦法,還是要讓無人車學(xué)會(huì)在沒有人類干預(yù)的情況下完全自動(dòng)而安全地控制汽車。這可能嗎?
麻省理工和微軟最新的研究成果,就有可能讓系統(tǒng)在訓(xùn)練過程中就認(rèn)識并改正自己的錯(cuò)誤操作,從而在實(shí)際駕駛中能夠處理那些現(xiàn)階段只能由人來判斷的意外狀況。
人類的新角色:
從幫無人車收拾爛攤子
到機(jī)器智能訓(xùn)練師
在最新的研究中,麻省理工和微軟提出了一個(gè)全新的自動(dòng)駕駛訓(xùn)練方式,來幫助無人車在遇到意外時(shí)做出更好的決策,而不是出事了才手把手地給它收拾爛攤子。
前期工作和傳統(tǒng)的訓(xùn)練方法一樣,研究人員對自動(dòng)駕駛系統(tǒng)進(jìn)行全方位的仿真訓(xùn)練,以便為車輛上路時(shí)可能遭遇的每一件事做好準(zhǔn)備。
不同的是,當(dāng)自動(dòng)駕駛汽車被部署到現(xiàn)實(shí)世界中運(yùn)行時(shí),新的“認(rèn)知盲點(diǎn)訓(xùn)練”才剛剛開始。在自動(dòng)駕駛測試車沿著預(yù)定的路線行駛時(shí),人類會(huì)時(shí)刻密切地監(jiān)視系統(tǒng)的行為,但核心任務(wù)并不是幫它救急,而是讓它觀察,在遭遇意外狀況時(shí),人類會(huì)怎么做。
如果汽車的行為是正確的,那人類就什么也不做。如果汽車的行動(dòng)偏離了人類行為,那么人類就會(huì)接管過方向盤。此時(shí),系統(tǒng)就會(huì)接收到一個(gè)信號,在這種特殊情況下,哪種才是可行的方案,怎樣的操作是不能被接受的。
通過收集系統(tǒng)發(fā)生或即將發(fā)生任何錯(cuò)誤時(shí)人類的反饋數(shù)據(jù),系統(tǒng)就有了一個(gè)人類反饋行為清單。研究人員將數(shù)據(jù)結(jié)合起來生成的新模型,就可以更精確地預(yù)測出,系統(tǒng)最需要如何采取哪些正確的行動(dòng)方式。
值得注意的是,在這個(gè)訓(xùn)練過程中,系統(tǒng)可能會(huì)接受到很多個(gè)相互矛盾的信號。
比如在系統(tǒng)眼中,和一輛大型汽車并行巡航時(shí)不減速是完全OK的,但如果對方是一輛救護(hù)車的話,不減速就并行就會(huì)被判錯(cuò)誤。
高度相似的情境,人類會(huì)做出截然相反的反應(yīng)。這種決策時(shí)的模糊地帶,也是目前自動(dòng)駕駛系統(tǒng)最容易犯錯(cuò)的地方,也是需要重新認(rèn)知的“盲點(diǎn)”。
為了解決這一問題,MIT和微軟的研究人員使用了一種Dawid-Skene的機(jī)器學(xué)習(xí)算法。該算法會(huì)為系統(tǒng)的行為分別打上“可接受”和“不可接受”兩種標(biāo)簽,以此來判斷系統(tǒng)在處理每個(gè)情況時(shí),決策策略究竟是“安全”還是出現(xiàn)了“盲點(diǎn)”,再以此優(yōu)化標(biāo)簽的可信度。
經(jīng)過反復(fù)測試,系統(tǒng)會(huì)記住遭遇過的模糊情境,并根據(jù)標(biāo)簽推算出一個(gè)“犯錯(cuò)比”概率。
舉個(gè)例子,如果系統(tǒng)在救護(hù)車情境中有10次執(zhí)行了9次正確的操作(減速/停車),那么就會(huì)將這種特殊狀況下的選擇標(biāo)記為是安全的。
簡單來說,搭載了“犯錯(cuò)比”的自動(dòng)駕駛系統(tǒng),在人類的幫助下建立了一個(gè)可供自己反思的“錯(cuò)題集”,面對往常容易出錯(cuò)的“認(rèn)知盲點(diǎn)”和模糊情境時(shí),就可以調(diào)取出可被人類所接受的行為方式,更加謹(jǐn)慎和明智地信息行動(dòng)。
人類的一小步,自動(dòng)駕駛的一大步?
從實(shí)用性來看,該研究還面臨一些現(xiàn)實(shí)問題。
比如說一般情況下,不可接受的行為比可接受的行為少得多,這就意味著,通過概率計(jì)算訓(xùn)練出的系統(tǒng),很可能在實(shí)際操作中預(yù)測所有情況都是安全的,這無疑是極其危險(xiǎn)的。
這種新的訓(xùn)練方式真正的潛力在于,憑借符合常識的操作,讓自動(dòng)駕駛有了更光明的前景。
首先,由于人類的高度參與,自動(dòng)駕駛在真正上路之前,能夠很好地預(yù)測在新的情況下可能會(huì)采取不正確的行動(dòng)。過去,這些只能被動(dòng)地等待安全員或云端人員處理。
正如賓夕法尼亞大學(xué)教授Eric Eaton所說的那樣,“這項(xiàng)研究讓機(jī)器智能和現(xiàn)實(shí)世界之間的不匹配來到了一個(gè)轉(zhuǎn)折點(diǎn),直接從人類對系統(tǒng)行為的反饋中推動(dòng)機(jī)器智能的進(jìn)步。”
另一方面,“人工”+“智能”的解決方案,也破除了造成“AI具有超能力”這一錯(cuò)覺的伊萊扎效應(yīng)(Eliza effect)。在一些復(fù)雜多變的現(xiàn)實(shí)世界中,人類處理“盲點(diǎn)”的能力遠(yuǎn)比AI更出色。
這有助于將自動(dòng)駕駛從過度樂觀和過度悲觀的兩種極端情緒拉回到中間狀態(tài)。
于是我們知道,自動(dòng)駕駛的發(fā)展,既不像大眾期待的那種“一步跨進(jìn)自動(dòng)化”,也不像唱衰者眼中那么凄風(fēng)苦雨,要等數(shù)十年才能信任AI駕駛。
在振蕩中前進(jìn),才是AI進(jìn)入生活最真實(shí)的樣子。
-
微軟
+關(guān)注
關(guān)注
4文章
6741瀏覽量
107891 -
MIT
+關(guān)注
關(guān)注
3文章
254瀏覽量
25005
原文標(biāo)題:MIT和微軟的新成果,能否幫自動(dòng)駕駛擺脫成長的煩惱?
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
如何構(gòu)建適合自動(dòng)駕駛的世界模型?

自動(dòng)駕駛汽車如何實(shí)現(xiàn)自動(dòng)駕駛

東風(fēng)汽車在自動(dòng)駕駛和智能網(wǎng)聯(lián)領(lǐng)域的發(fā)展成果
如何設(shè)計(jì)好自動(dòng)駕駛ODD?

國內(nèi)首批L3級高速自動(dòng)駕駛車輛專業(yè)號牌率先在北京落地#北京#自動(dòng)駕駛#汽車智能

汽車行業(yè)迎L3自動(dòng)駕駛上路潮,華為、小鵬、理想搶跑#晶揚(yáng)電子 #自動(dòng)駕駛 #L3級自動(dòng)駕駛 #智能駕駛
不同等級的自動(dòng)駕駛技術(shù)要求上有何不同?
Nullmax端到端自動(dòng)駕駛最新研究成果入選ICCV 2025

卡車、礦車的自動(dòng)駕駛和乘用車的自動(dòng)駕駛在技術(shù)要求上有何不同?

小馬智行助力公路干線物流自動(dòng)駕駛發(fā)展
自動(dòng)駕駛安全基石:ODD

劉強(qiáng)東,進(jìn)軍汽車領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車# 京東自動(dòng)駕駛快遞車
AI將如何改變自動(dòng)駕駛?
華礪智行入選2024年度自動(dòng)駕駛高成長企業(yè)榜




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論