") 汽車自動(dòng)駕駛的“那些事” 你知道嗎?
汽車自動(dòng)駕駛的“那些事” 你知道嗎?

身處汽車行業(yè),深感汽車行業(yè)的技術(shù)革新是迅速的,這次只拿自動(dòng)駕駛聊聊個(gè)人的一些想法和觀點(diǎn),因自動(dòng)駕駛作為當(dāng)前熱點(diǎn)及未來汽車發(fā)展的方向,我們有必要拿出來整理分析一波。
目前自動(dòng)駕駛的很多技術(shù)其實(shí)在機(jī)器人領(lǐng)域很早就已出現(xiàn)和應(yīng)用,比如導(dǎo)航定位、機(jī)器視覺等,因此自動(dòng)駕駛可以算是機(jī)器人領(lǐng)域應(yīng)用的一塊分支,所以我們也不必過分夸大它有多牛掰。因自動(dòng)駕駛系統(tǒng)的實(shí)驗(yàn)最早可追溯到1920年,而真正意義上的第一輛自動(dòng)駕駛汽車也在1977年由日本的Tsukuba Mechanical Engineering Laboratory開發(fā)出來。隨著時(shí)代的變化,該技術(shù)也得到了快速的發(fā)展和推廣,Waymo在2018年10月份曾透漏其在自動(dòng)駕駛的測試?yán)锍桃殉^16000000km并以每月1600000km的速度增長,在12月Waymo成為了美國第一家商業(yè)化自動(dòng)駕駛出行服務(wù)的公司,這樣的技術(shù)進(jìn)步和取得的成果是著實(shí)不易的,當(dāng)然我也對自動(dòng)駕駛真正的商業(yè)化持保守態(tài)度,但在這個(gè)AI、機(jī)器學(xué)習(xí)、大數(shù)據(jù)、車聯(lián)網(wǎng)盛起的年代(個(gè)人認(rèn)為這些雖是未來方向,但過去幾年都有被過度炒作的嫌疑),其是未來出行方式的必然選擇是不爭的事實(shí),很多零部件供應(yīng)商和傳統(tǒng)OEM都在自動(dòng)駕駛領(lǐng)域積極部署以期搶占先機(jī)。
前段時(shí)間看到Tier1的零部件供應(yīng)商“BOSCH豪擲10億歐元在德建立半導(dǎo)體工廠從而掌握自動(dòng)駕駛芯片化的核心競爭力”的消息,個(gè)人對該消息其實(shí)是不Care的,因BOSCH在自動(dòng)駕駛解決方案的研究其實(shí)很早就開始并測試驗(yàn)證,如果哪個(gè)零部件供應(yīng)商或OEM不在自動(dòng)駕駛領(lǐng)域方面進(jìn)行規(guī)劃和部署反而是一種不正常。
一.自動(dòng)駕駛的分級
對自動(dòng)駕駛的分級,全球汽車行業(yè)公認(rèn)兩個(gè)組織提出的:美國高速公路安全管理局(NHTSA)和美國機(jī)動(dòng)車工程師學(xué)會(SAE),但在這兩者中又以按SAE的分級標(biāo)準(zhǔn)居多,SAE將自動(dòng)駕駛層級劃分為6級,如下:
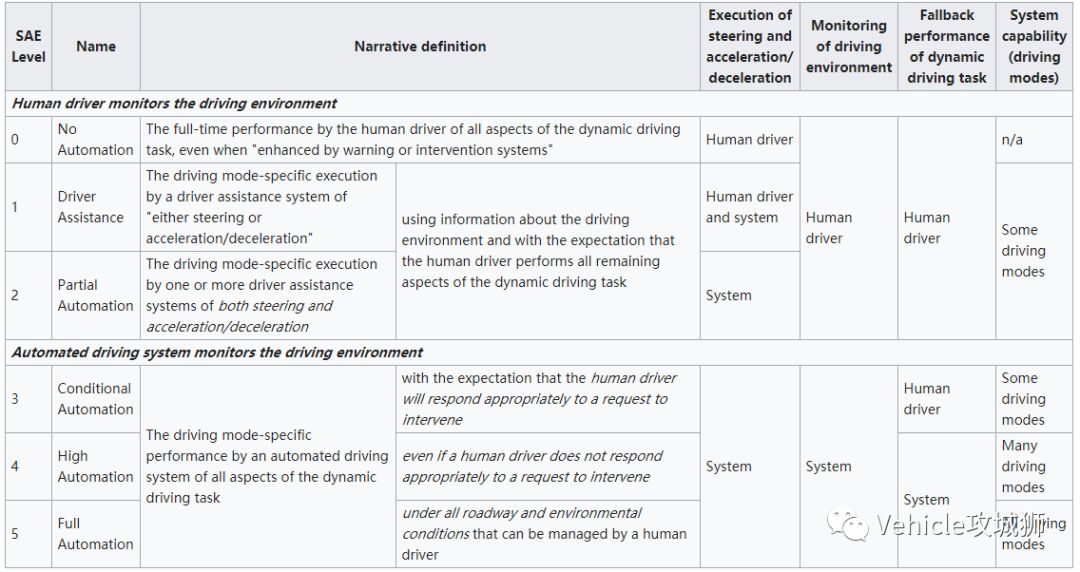
對于各個(gè)等級的詳細(xì)介紹,網(wǎng)上有很多,我這里不再詳細(xì)贅述。
二.自動(dòng)駕駛的相關(guān)技術(shù)
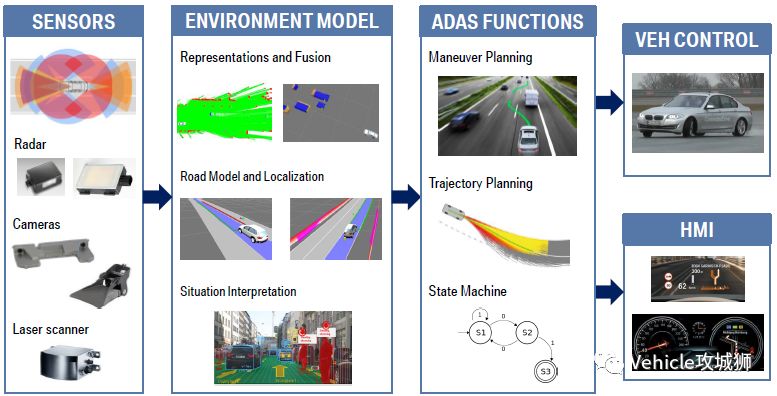
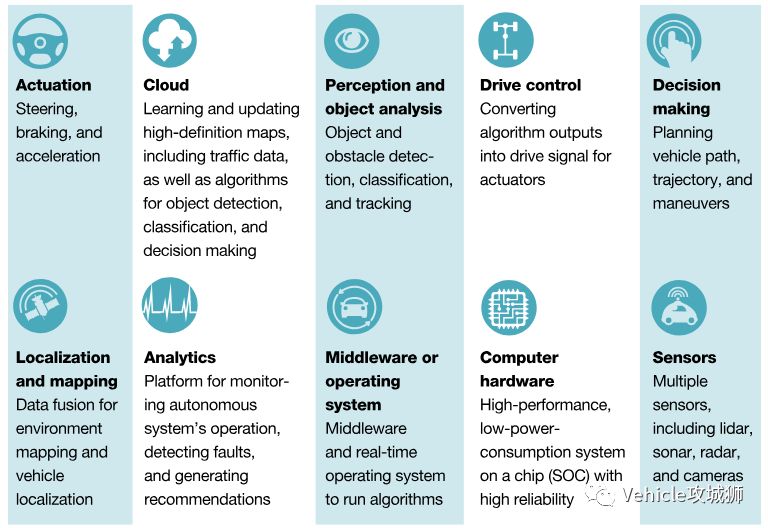
無人駕駛技術(shù)涉及多技術(shù)集成和多學(xué)科交叉,一無人駕駛系統(tǒng)包含多個(gè)傳感器:激光雷達(dá)、RGB和深度攝像頭、GPS、長距雷達(dá)、短距雷達(dá)、IMU等,同時(shí)又需整合多個(gè)軟件模塊(包括路徑規(guī)劃、避障、定位、圖像識別和環(huán)境建模等),此外還需要強(qiáng)大的硬件基于軟件功能實(shí)時(shí)處理海量的傳感器信息并實(shí)現(xiàn)對車輛的控制,因此對系統(tǒng)設(shè)計(jì)和軟硬件資源都提出了更高的要求。
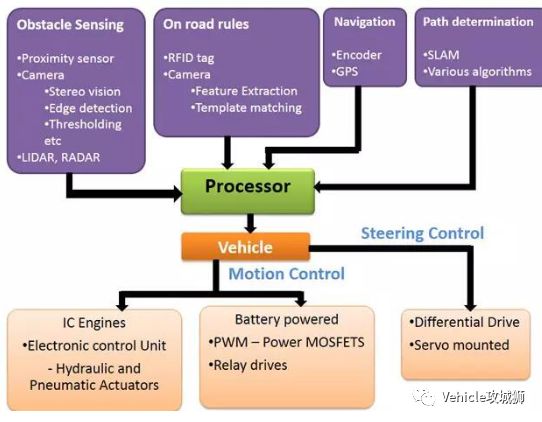
無人駕駛系統(tǒng)首先獲取并處理所處環(huán)境信息,基于數(shù)據(jù)和算法確定當(dāng)前所處位置,并根據(jù)所設(shè)定的目標(biāo)規(guī)劃一條合理最優(yōu)的運(yùn)動(dòng)路徑,從而驅(qū)動(dòng)車輛向目標(biāo)移動(dòng)并規(guī)避移動(dòng)過程中的障礙物或?qū)o急情況采取必要的安全措施,因此所涉及的技術(shù)包括:導(dǎo)航定位、路徑規(guī)劃、圖像識別、機(jī)器學(xué)習(xí)和傳感器融合等相關(guān)技術(shù)。
下面選三個(gè)方面大體聊聊
1. 導(dǎo)航定位技術(shù)
導(dǎo)航定位技術(shù)是自動(dòng)駕駛系統(tǒng)的關(guān)鍵和基礎(chǔ),它能反映車輛自主性和智能性,在自動(dòng)駕駛領(lǐng)域,導(dǎo)航定位主要采用SLAM技術(shù)。SLAM技術(shù)的實(shí)現(xiàn)途徑有視覺SLAM(VSLAM)和激光雷達(dá)SLAM(Ladar-SLAM),激光雷達(dá)SLAM是目前最穩(wěn)定、最可靠且性能最高的SLAM方式,在無人駕駛領(lǐng)域大都采用基于激光雷達(dá)的SLAM技術(shù)。SLAM當(dāng)前實(shí)現(xiàn)的方式大致有兩類:基于概率模型和非概率模型的方法,其中基于概率的方法是當(dāng)前研究的重點(diǎn),基于概率模型的算法主要有基于卡爾曼濾波的SLAM、基于粒子濾波的FastSLAM等。
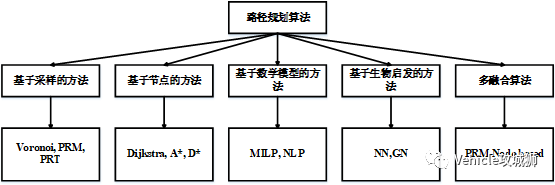
2. 路徑規(guī)劃技術(shù)
路徑規(guī)劃主要有全局和局部路徑規(guī)劃兩種,全局路徑規(guī)劃需要依賴已建立的環(huán)境地圖(即先驗(yàn)地圖),其作用就是建立一條從起點(diǎn)到目標(biāo)點(diǎn)的全局路線;而局部路徑規(guī)劃則是根據(jù)全局路徑基于動(dòng)態(tài)環(huán)境所進(jìn)行的一種路徑規(guī)劃技術(shù),從而適應(yīng)存在未知障礙物或障礙物存在變化的環(huán)境。
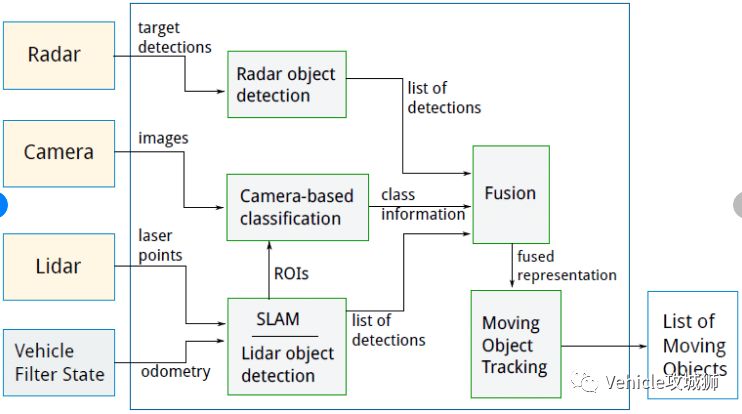
3. 傳感器融合技術(shù)
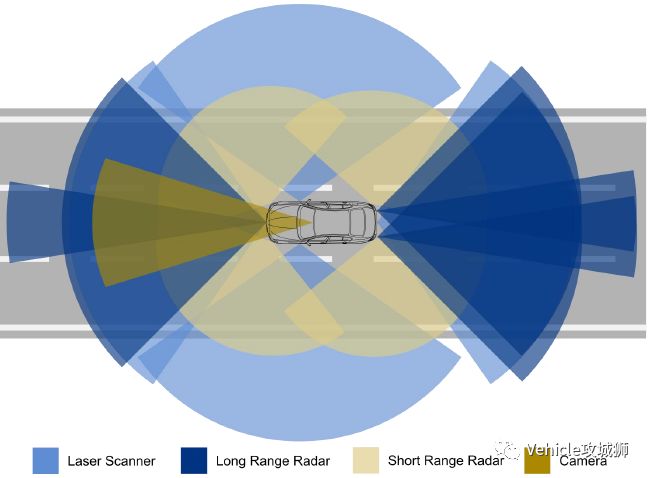
自動(dòng)駕駛車會載有激光雷達(dá)、RGB-D深度攝像頭、超聲波等不同位置的多個(gè)同類或不同類的傳感器。而為了對各個(gè)傳感器所獲取的局部環(huán)境信息加以綜合,形成對環(huán)境完整準(zhǔn)確的描述,必須采用多傳感器融合技術(shù)來克服單個(gè)傳感器所具有的局限性。多傳感器融合技術(shù)主要有基于參數(shù)推理的貝葉斯推理、基于模糊集理論的方法、基于神經(jīng)網(wǎng)絡(luò)法及卡爾曼濾波法等,其中應(yīng)用最為廣泛的多傳感器融合技術(shù)是卡爾曼濾波法。
三. 所需技能Get
從上所述可知自動(dòng)駕駛所涉及的學(xué)科和技術(shù)很多,但作為個(gè)人應(yīng)該在哪些方面進(jìn)行個(gè)人技能的提升,從而能夠成為一名自動(dòng)駕駛工程師呢?我這里只列出四個(gè)方面的技能要求:
1. 扎實(shí)的數(shù)學(xué)功底
當(dāng)你一腳踏入機(jī)器人和無人駕駛領(lǐng)域,你會經(jīng)常接觸到諸如貝葉斯濾波、卡爾曼濾波、粒子濾波、高斯分布等一系列讓你懷疑人生的專業(yè)術(shù)語,而這些原理的推導(dǎo)往往需要扎實(shí)的線性代數(shù)和概率統(tǒng)計(jì)功底,此外強(qiáng)大的數(shù)學(xué)基礎(chǔ)是進(jìn)行算法設(shè)計(jì)和優(yōu)化的基礎(chǔ),越來越發(fā)覺線性代數(shù)、概率統(tǒng)計(jì)、數(shù)值計(jì)算在當(dāng)前AI、機(jī)器學(xué)習(xí)和大數(shù)據(jù)盛行時(shí)代下的重要性,因?yàn)楫?dāng)前很多問題最終都可通過概率統(tǒng)計(jì)和線性代數(shù)進(jìn)行建模和求解,曾看到某位大神這么說過“優(yōu)秀的工程師和科學(xué)家在職業(yè)生涯中要學(xué)至少五次線性代數(shù)”,看到這,我等后輩是不是心涼了很多,但大家莫慌,讓我們擼起袖子就是干!!!
2. 過硬的編程技術(shù)
首先,發(fā)表個(gè)人觀點(diǎn):在可預(yù)見的未來,C是最好的語言,Linux是最好的操作系統(tǒng)。當(dāng)然這不是說讓大家有選擇性的選擇自己應(yīng)學(xué)習(xí)哪種編程語言,因?yàn)榫唧w到工作則需要兼?zhèn)涠喾N編程語言或跨平臺的開發(fā)能力,每個(gè)人需要根據(jù)自己的實(shí)際情況去學(xué)習(xí),例如嵌入式開發(fā)毫無疑問優(yōu)先選擇C,而算法開發(fā)則可能會使用C++、Python或Matlab/Simulink,而不同的應(yīng)用又可能依賴于不同的平臺才能運(yùn)行,例如很多自動(dòng)駕駛項(xiàng)目都基于ROS做的算法和應(yīng)用開發(fā),而ROS作為中間件則依賴于Linux,因此具體情況具體分析,但多種編程語言的掌握是必須的。
3. 軟硬件開發(fā)能力
掌握編程語言是進(jìn)行軟件功能開發(fā)的基礎(chǔ),同時(shí)也會為我們查問題提供了保障,而軟件功能則是需求的實(shí)現(xiàn),如何將一復(fù)雜的系統(tǒng)需求通過編程的手段實(shí)現(xiàn)則是一種能力。此外,軟件功能的實(shí)現(xiàn)最終需依賴于硬件,對于硬件的設(shè)計(jì)及工作原理的掌握也是不可或缺的。
4. 熟悉汽車電子的開發(fā)流程
IT行業(yè)的軟件開發(fā)不同于汽車軟件的開發(fā),汽車行業(yè)有諸多的標(biāo)準(zhǔn)要遵循且還有諸多的測試驗(yàn)證要求,在可靠性和安全性方面有著更高的要求。汽車行業(yè)需要可靠的軟件設(shè)計(jì)同時(shí)還需要滿足嵌入式的需求,而這些要求的實(shí)現(xiàn)需要高質(zhì)量的代碼、充分的測試覆蓋度和豐富的批產(chǎn)經(jīng)驗(yàn)等方面來支撐。
因此自動(dòng)駕駛作為一門交叉學(xué)科,其涉及的方面很多,每個(gè)人不可能包攬每項(xiàng)的冠軍,而應(yīng)選擇成為某一領(lǐng)域的專家。
四.普及依然漫長
關(guān)于自動(dòng)駕駛,正如英國 Millbrook 試驗(yàn)場首席自動(dòng)駕駛汽車工程師 Peter Stoker所說:“如今,有關(guān)自動(dòng)駕駛的炒作從來沒有停止,但我們必須明確告訴大家,自動(dòng)駕駛汽車并不會在未來幾年中大量出現(xiàn)在人們的生活中。而且,即使自動(dòng)駕駛汽車最終真正到來,也一定是先在有限區(qū)域中進(jìn)行有選擇性的逐步推廣,比如“貨物運(yùn)輸”和“最后一英里通勤”等行駛路線較為固定的行駛場景。”因此技術(shù)的普及依然需要很長的時(shí)間,至于原因,我這里只摘三個(gè)方面進(jìn)行說明:
1. 系統(tǒng)的可靠性
這一點(diǎn)應(yīng)該是最重要的一點(diǎn),因安全是汽車行業(yè)的生命線,自動(dòng)駕駛要想走向?qū)嶋H應(yīng)用,其最終必須能在復(fù)雜的環(huán)境中保證系統(tǒng)的穩(wěn)定性并提供足夠的駕駛安全,而在這方面我認(rèn)為很多自動(dòng)駕駛公司其實(shí)都還沒做到這種地步。
2. 成本限制
自動(dòng)駕駛汽車功能的實(shí)現(xiàn)需要依賴于不同或相同的多個(gè)傳感器支持和強(qiáng)大的硬件實(shí)現(xiàn),以必不可少的激光雷達(dá)為例,車用激光雷達(dá)行業(yè)先導(dǎo)公司Velodyne推出的激光雷達(dá)具有測量精度高、性能優(yōu)越的特點(diǎn),同時(shí)具有豐富的產(chǎn)品線,包括16線、32線及64線等產(chǎn)品,但同樣價(jià)格也是高昂的。

因此可想而知,單單激光雷達(dá)的成本就已很高,如果再加上長短距雷達(dá)、攝像頭等傳感器和硬件,整車的成本無疑是高昂的。
3. 充分的實(shí)驗(yàn)驗(yàn)證
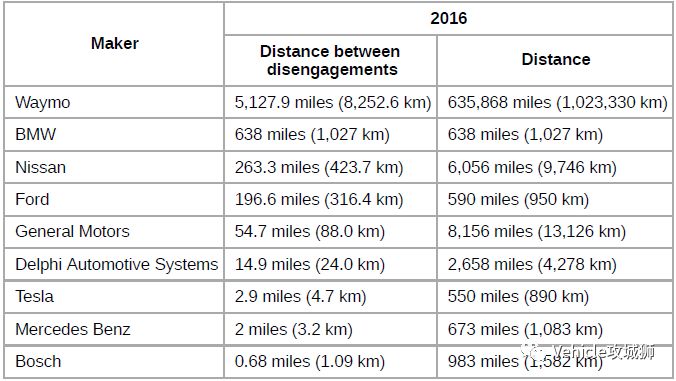
自動(dòng)駕駛汽車功能的測試驗(yàn)證需要足夠且豐富的樣本數(shù)據(jù),樣本數(shù)據(jù)的采集及算法的訓(xùn)練需要耗費(fèi)長期且大量的時(shí)間積累,如下是2016年幾大零部件供應(yīng)商和OEM在該方面測試的里程數(shù)匯總。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
794文章
14890瀏覽量
180018
原文標(biāo)題:聊聊自動(dòng)駕駛
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
如何構(gòu)建適合自動(dòng)駕駛的世界模型?

自動(dòng)駕駛汽車如何完成超車?

自動(dòng)駕駛汽車如何實(shí)現(xiàn)自動(dòng)駕駛

2026年自動(dòng)駕駛汽車發(fā)展趨勢前瞻

汽車自動(dòng)駕駛的太陽光模擬應(yīng)用研究

自動(dòng)駕駛汽車如何確定自己的位置和所在車道?

不同等級的自動(dòng)駕駛技術(shù)要求上有何不同?
如何確保自動(dòng)駕駛汽車感知的準(zhǔn)確性?

塑造自動(dòng)駕駛汽車格局的核心技術(shù)
看看那些用樹莓派打造的自動(dòng)駕駛汽車!

自動(dòng)駕駛汽車是如何準(zhǔn)確定位的?

自動(dòng)駕駛安全基石:ODD




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論