 蘋果自動駕駛汽車的表現很可能受到了多個因素的影響
蘋果自動駕駛汽車的表現很可能受到了多個因素的影響

北京時間2月13日消息,自2017年4月以來,蘋果公司一直在加州庫比蒂諾的道路上測試預裝其自動駕駛系統的雷克薩斯SUV。現在,蘋果首次向加州車輛管理局(DMV)提交了“脫離報告”(disengagement report)。
脫離報告指的是自動駕駛汽車退出自動駕駛模式,把汽車交還給安全駕駛員控制的次數,或者說安全駕駛員干預汽車行駛的次數。所有蘋果自動駕駛SUV都配備了安全駕駛員,以便在發生緊急情況時接管汽車。
加州車輛管理局將在本周晚些時候發布完整報告,但是其中部分數據已短暫出現在了該局網站上。此份報告覆蓋的日期從2017年12月至2018年11月,涉及所有在加州運營自動駕駛汽車的公司,包括蘋果。
報告稱,蘋果在加州道路上運營著62輛自動駕駛汽車。和之前的報道相比,這一數據有些偏低。此前報道稱,截至去年11月,蘋果運營著72輛自動駕駛汽車。
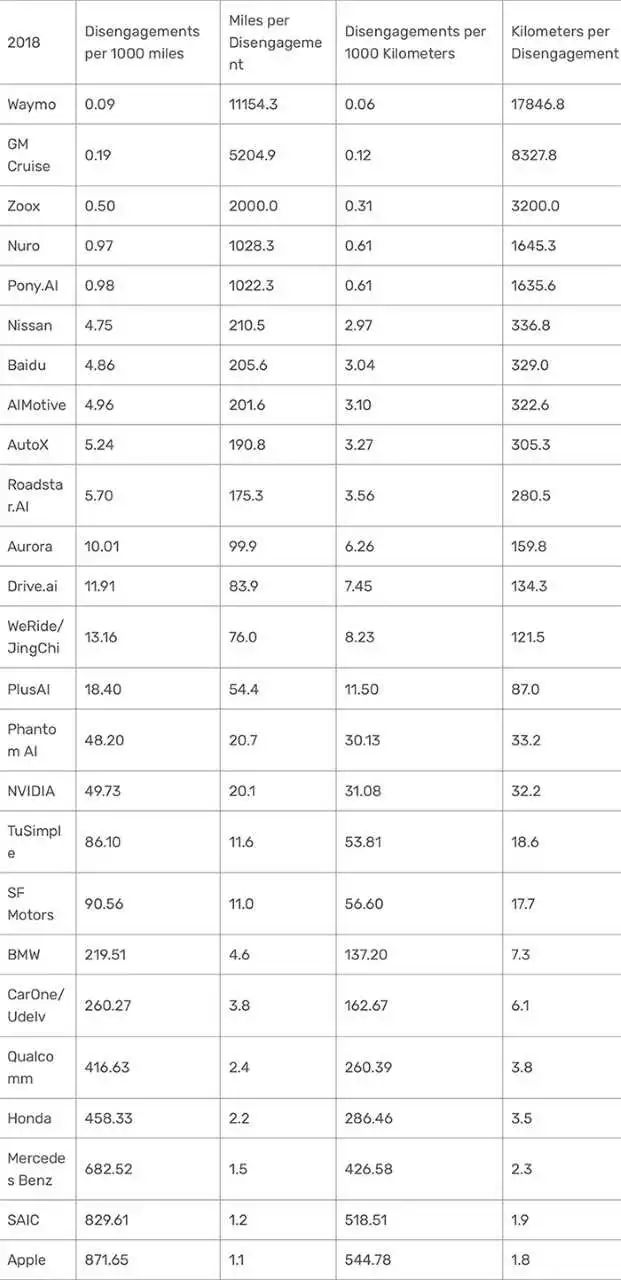
數據顯示,蘋果自動駕駛汽車每1000英里要脫離871.65次,大約每1.1英里脫離一次。按公里計算,蘋果自動駕駛汽車每1000公里脫離544.78次,合每1.8公里脫離一次。相比之下,谷歌母公司Alphabet旗下自動駕駛汽車公司Waymo的汽車每1000英里只脫離0.09次,每11,154.3英里才脫離一次。
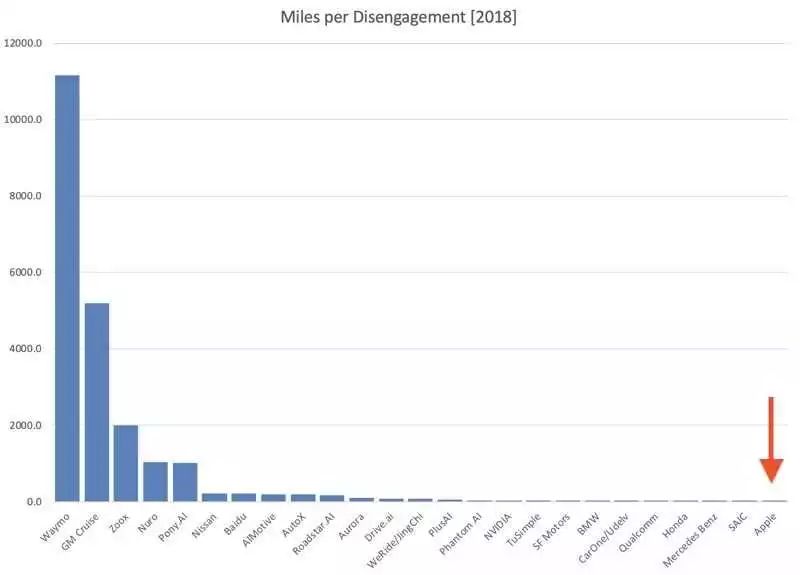
蘋果自動駕駛汽車每1.1英里就脫離一次
百度公司也在加州測試自動駕駛汽車。數據顯示,百度自動駕駛汽車每1000英里脫離4.86次,相當于每205.6英里脫離一次。按公里計算,百度自動駕駛汽車每1000公里脫離3.04次,相當于每329公里脫離一次。
蘋果自動駕駛汽車的總脫離次數多于任何其他在加州測試自動駕駛汽車的公司,說明蘋果安全駕駛員在測試自動駕駛系統時需要更為頻繁地接管汽車。這可能是因為蘋果測試的路線更具挑戰性,安全駕駛員十分小心或者自動駕駛系統還不夠成熟。
蘋果在所有自動駕駛汽車公司中排名最后
蘋果自動駕駛汽車的表現很可能受到了多個因素的影響,有一點需要指出的是,蘋果測試自動駕駛汽車的時間短于其他公司。另外,脫離次數由企業自主申報。企業在如何報告數據,怎樣認定自動駕駛脫離上擁有一定自由。
2018年,蘋果自動駕駛汽車卷入了兩起輕微碰撞事故中,一次發生在8月,另一次發生在10月,但是兩次事故都不是蘋果的責任。在8月份的事故中,蘋果汽車處于自動駕駛模式,10月份的碰撞則處于人工駕駛模式。
-
蘋果
+關注
關注
61文章
24600瀏覽量
208376 -
自動駕駛汽車
+關注
關注
4文章
385瀏覽量
42706
原文標題:蘋果自動駕駛汽車水平如何?報告顯示排名倒數第一
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何構建適合自動駕駛的世界模型?

自動駕駛汽車如何完成超車?

自動駕駛汽車如何實現自動駕駛

汽車自動駕駛的太陽光模擬應用研究

自動駕駛汽車如何確定自己的位置和所在車道?

如何確保自動駕駛汽車感知的準確性?

自動駕駛汽車直行時遇到左轉汽車應該如何行駛?

太陽光模擬器 | 在汽車自動駕駛開發中的應用
自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD




 工商網監
工商網監
評論