 無人機管家免費開放精靈4RTK機型的后差分解算功能
無人機管家免費開放精靈4RTK機型的后差分解算功能

2018年6月大疆發布了新一代了精靈4 RTK,這款無人機在原機型的基礎上增加了RTK/PPK功能,使得精靈4 RTK在一定條件下具備了少像控或者免像控的能力。為了能給廣大用戶帶來更好的服務體驗,飛馬無人機管家將在今天上線的版本上,免費開放精靈4 RTK機型的后差分解算功能,用戶無需購買,下載更新軟件即可使用。
飛馬“無人機管家”是無人機數據獲取、處理、顯示、管理以及無人機維護的一站式智能GIS系統,支持固定翼、旋翼等種類豐富的飛行平臺,滿足各種應用需求的航線模式,支持真三維地形數據的精準三維航線規劃、三維實時飛行監控、快速飛行質檢,具有豐富的數據預處理工具箱,支持穩健的精度控制和自動成圖、豐富的4D和三維成果生產,具有可視化監控中心,提供系統升級、智能維護、信息推送等云服務。
一、差分解算
這里以精靈4 RTK實際飛行數據為例,講述無人機管家針對精靈4 RTK數據的差分解算流程。
1、數據獲取
采用精靈4 RTK在天津寶坻無人機綜合驗證場進行飛行測試,測區內布設有固定靶標,可進行精度核查。此次飛行設計地面分辨率2cm,飛行高度73m,航向重疊度80%,旁向重疊度60%,架設飛馬配備的基站(可支持全部型號基站),飛機連接千尋CORS進行實時RTK數據獲取。
航線設計
測區情況圖及靶標分布圖
2、數據整理
飛行獲取數據如下:
? 原始影像數據:DCIM文件夾
? 基站GPS靜態數據:_4722471.GNS文件
? 機載GPS觀測數據:包括GPS觀測原始數據、RTK軌跡、打標時間及偏心改正等信息文件。
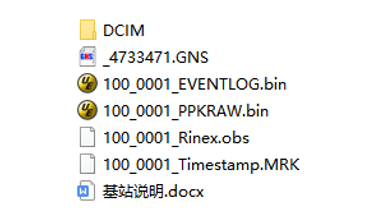
原始數據
3、后差分解算
采用無人機管家“智理圖”模塊的GPS處理工具進行差分解算。
第一步:
采用”RT27轉RINEX”工具將基站.GNS格式轉換為.O文件(Rinex格式),若使用其它廠家基站,則導出Rinex格式即可。
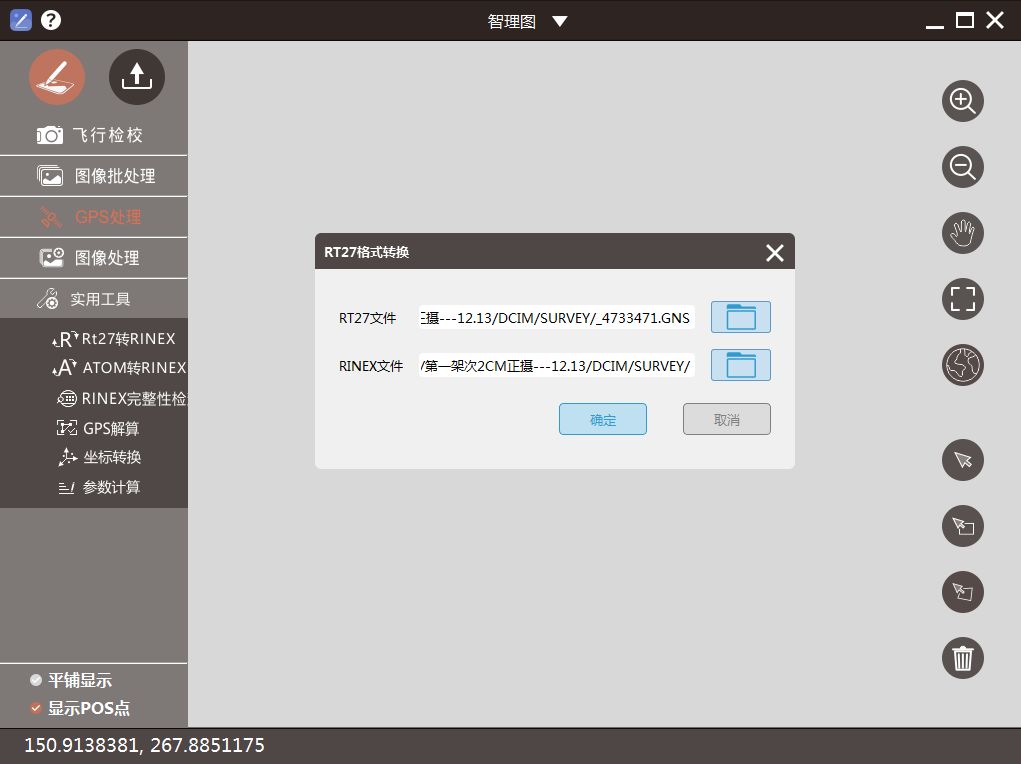
RINEX格式轉換
第二步:
點擊“GPS解算”,進行以下設置:
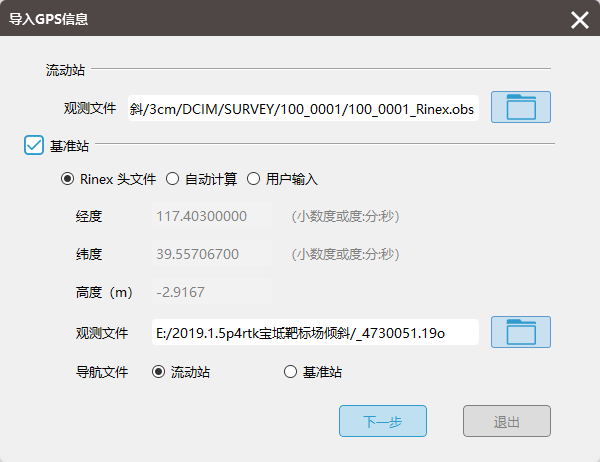
1)流動站設置
觀測文件為飛機觀測GPS數據,精靈4 RTK數據格式為.obs格式
2)基準站設置
? 勾選基準站
? 單擊“用戶輸入”,填寫基站WGS84經緯度橢球高坐標。
? 選擇基站觀測數據,須轉換為rinex格式文件。
? 導航文件默認為“流動站”
點擊“下一步”

差分解算參數設置1
第三步:
參數設置:
1)解算方式:勾選差分
2)GPS天線:直接輸入垂高即可,該數據由于直接量測的為相位中心坐標,因此垂高為0
3)GNSS系統:勾選GPS,BeiDou
4)保存路徑:設置輸出路徑
點擊“確定”,軟件進行差分解算。
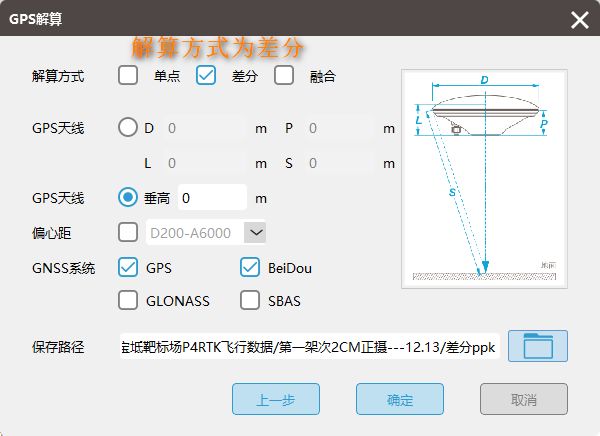
差分解算參數設置2
第四步:
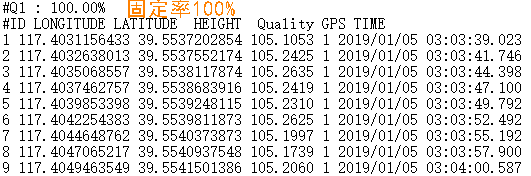
經差分解算,輸出高精度差分結果,檢查其固定率為100%,表示每個曝光點的GPS值均為固定解,該高精度GPS數據即可用于后續數據處理。

GPS差分解算結果
二、無人機管家全流程處理
針對精靈4 RTK獲取的高精度后差分數據,無人機管家專業版支持免像控空三,及控制點和差分POS的聯合平差,還可進行點云、DSM、DOM/TDOM、2.5D及3D模型成果輸出,可以滿足客戶全方位的數據獲取及生產需求。
全成果輸出
1、免像控空三
采用無人機管家“智拼圖”模塊,基于高精度GPS和影像建立工程,一鍵式處理得到免像控的空三成果。
一鍵免像控空三
免像控點位預測
測區內一共12個控制點,將其全部作為檢查點,軟件可輸出檢查點空三殘差報告,具體如下:
檢查點平面中誤差0.094m,可滿足1:500航測平面精度要求。
檢查點高程中誤差為1.330m,且高誤差為一個系統性誤差,推測其產生原因在于旋翼姿態過于平穩,平差約束相對薄弱導致,其可通過飛構架航線或者傾斜航線來提高高程精度。
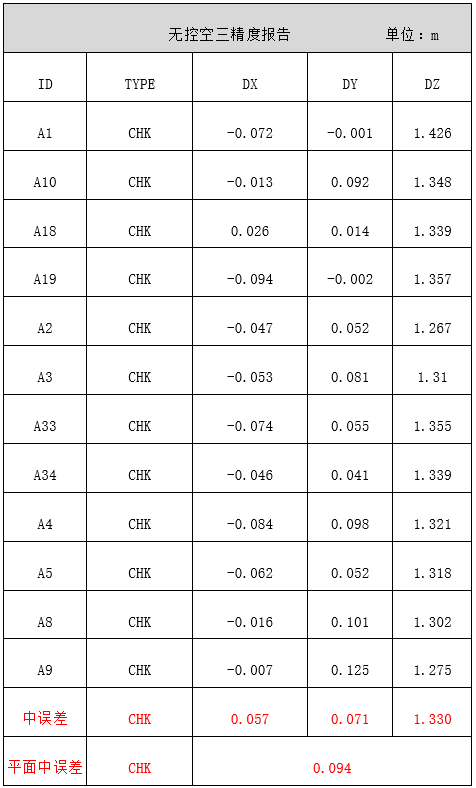
無控空三精度報告
2、“控制點+高精度GPS”聯合平差
為提高精靈4 RTK高程精度,可采用“控制點+高精度GPS”聯合平差的模式,來實現高精度GPS下的稀少控制點成圖,滿足1:500測圖要求。這里分別對后差分PPK模式和實時差分RTK模式進行了數據處理精度驗證。
1)PPK模式空三處理
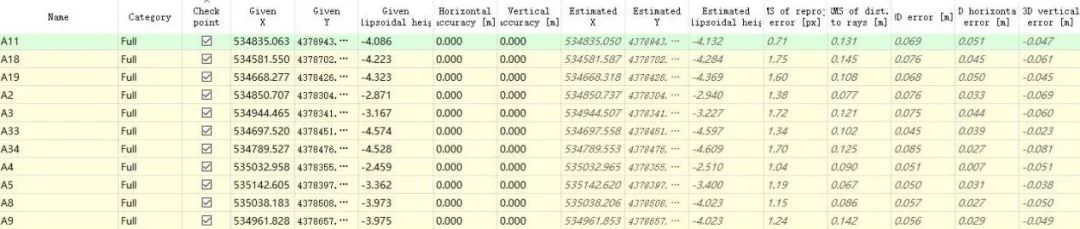
選取測區最外圍四個點當做控制點,其余點當做檢查點,進行“控制點+PPK”聯合平差處理,且軟件在空三的同時可進行相機的自檢校。
智拼圖刺點界面(黃色點為控制點,藍色為檢查點)
控制點+高精度GPS聯合平差
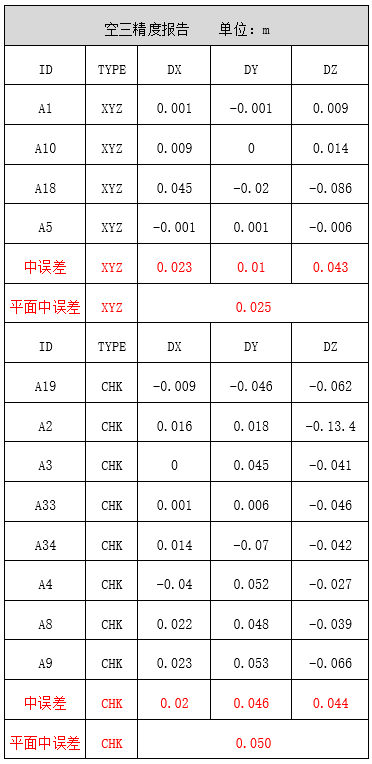
其空三精度統計如下:
控制點的平面中誤差為2.5cm;高程中誤差為4.3cm,
檢查點的平面中誤差為5.0cm;高程中誤差為4.4cm,
由此可知,基于少量控制點和高精度后差分GPS進行聯合平差處理,高程精度可大大提高,滿足1:500測圖要求。
空三精度報告(控制點和檢查點)
2)RTK模式空三處理
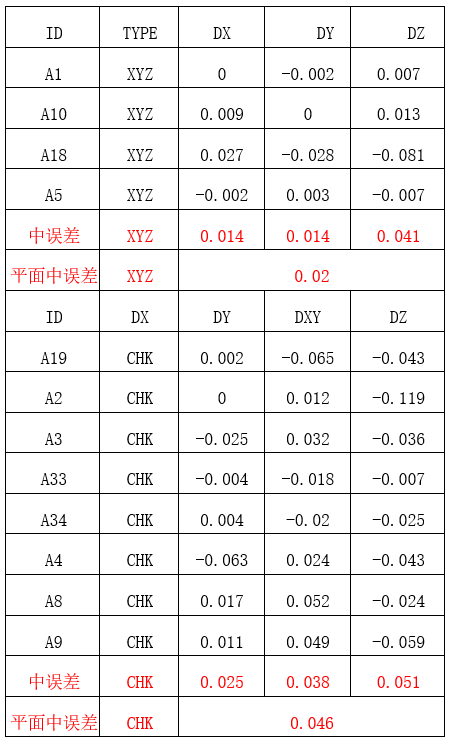
無人機管家還支持基于精靈4 RTK獲取的實時高精度GPS進行聯合平差處理,控制點設置和PPK模式相同,其空三帶控精度精度統計如下:
控制點的平面中誤差為2.0cm;高程中誤差為4.1cm,
檢查點的平面中誤差為4.6cm;高程中誤差為5.1cm,
其精度同樣滿足1:500測圖要求。
空三精度報告(控制點和檢查點)
3、全成果輸出
基于高精度空三結果無人機管家可一鍵輸出密集點云、DSM、DOM/TDOM成果。
密集點云
DSM成果
TDOM成果
4、結論
由此次測試可知,飛馬無人機管家可進行精靈4 RTK的后差分GPS解算,可獲取高固定率的高精度GPS數據。且基于高精度GPS成果,無人機管家還支持免像控或者稀少控制的空三處理,輸出點云、DSM、DOM等多種成果,滿足1:500大比例尺成圖測圖需求。其RTK模式和PPK模式均可滿足一定條件下的稀少控制點高精度成圖,而常規我們建議盡可能采用PPK模式進行數據處理,可避免飛行時候由于信號不好RTK中斷或者距離過大造成的精度不好的問題。
三、精靈4 RTK傾斜免像控案例
基于精靈4 RTK還可進行傾斜數據獲取,再基于無人機管家進行差分解算,可進入三維建模軟件ContextCapture進行空三及建模處理。經實際飛行測試,精靈4 RTK可實現小范圍的免像控高精度三維模型的獲取。具體如下:
1、數據獲取
測區采用交叉傾斜航線,地面分辨率為3cm,飛行高度110m,航向重疊度為80%,旁向重疊度80%;結合精靈4 RTK的續航能力,飛行過程采用全程飛行,共計飛行2架次,采集影像795張。
航線示意圖
影像數據
2、差分解算
采用智理圖進行差分解算,解算流程與上一案例解算流程相同。
GPS差分解算
GPS差分解算結果
3、CC空三及建模處理
導入影像和高精度差分GPS,進行空三處理和刺點,并將所有點勾選為檢查點。由CC點位自動預測可知,空三后預測控制點位置與實際位置偏差2個像素以內。
空三3D視圖
CC刺點界面預測點與實際點偏差統計
檢查點點位預測
提交模型生產,成果如下圖。模型紋理清晰,幾何結構完整。
模型整體
模型局部
模型局部
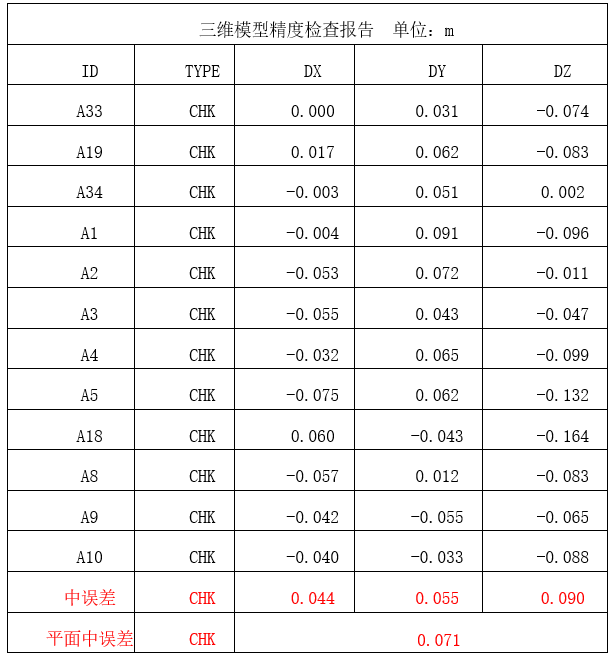
4、精度檢查
將模型上檢查點坐標與實測坐標做對比,得到精靈4 RTK在用PPK模式下的傾斜免像控精度。
檢查點平面中誤差為7.1cm,高程中誤差為9cm,可滿足1:500測圖精度要求。
5、結論
由以上測試可知,將精靈4 RTK應用于三維實景建模,基于無人機管家解算出的高精度GPS,可在三維建模軟件中進行傾斜免像控處理,滿足1:500測圖要求。這對于小場景三維建模來說可極大節省人工布設控制點的工作量,提高作業效率,且最終生成的模型幾何結構完整,紋理清晰,可用于后期三維測圖需要。
-
gps
+關注
關注
22文章
3027瀏覽量
173511 -
無人機
+關注
關注
236文章
11298瀏覽量
195622
原文標題:無人機管家免費開放精靈4 RTK后差分解算功能
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
新規落地后無人機起飛不難,如何通過3225封裝確保特種無人機系統穩定運行?

請問多旋翼無人機單個電機故障怎么排查問題?
無人機智能巡檢系統的技術特點與應用優勢
ce認證對無人機有要求嗎

低空無人機巡檢監控管理系統,沃思智能

離軸技術:賦能無人機精準配送的核心芯片應用
見聞|日本公司用紙造軍用無人機

科普|無人機反制槍介紹
低空物流:無人機開啟未來配送新篇章
使用 Betaflight 和樹莓派實現 FPV 無人機自主飛行!

普源示波器用FFT功能快速診斷無人機電機驅動故障



 工商網監
工商網監
評論