 交通事故數據如何助力自動駕駛
交通事故數據如何助力自動駕駛

作為曾經十余年奮戰在道路交通事故再現分析第一、第二線的一員,在面對自動駕駛測試這個新主題的時候,時常被問到關于如何基于已有的事故數據支持ADAS或自動駕駛測試的問題…索性把想到的一些零零總總的內容整理為下文,以期引發更多、更深入的探討。筆者認知水平和領悟層次有限,難免疏漏,歡迎指正。
本文轉自同濟智能汽車研究所,智車科技(IV_Technology)整理,轉載請注明來源。
背景:關于測試場景生成
基于場景的測試是ADAS測試的主要手段(包括法規測試和各國的NCAP測試等),也是目前更高等級自動駕駛功能所采用的主流的測試方法。生成場景的方法大致可以分為兩大類:基于知識的(演繹的方法)&基于數據的(歸納的方法)。其細分架構如下圖所示。
圖 1 場景生成方法概要
基于知識的場景生成方法,是指從自動駕駛系統從外界接受信息的軟硬件、處理信息的軟硬件、執行指令的軟硬件等方面開展理論分析;從解析的角度分析該系統的功能和性能的邊界,并以此為主要依據,創建測試的場景。從自動駕駛系統的功能原理來看,該方法的挑戰主體是其中與外界關聯緊密的環境感知系統(含定位系統)和規劃決策系統。這部分的分析比較偏重白箱,與特定的被測對象結合緊密。
基于數據的場景生成方法,是指基于已有的、人類駕駛員在真實交通中積累的、各類駕駛過程數據,經過分析、提煉并生成的測試場景。這些駕駛過程數據,依照數據來源可以大致分為三類:1)FOT(Field Operational Test) / NDS(Naturalistic Driving Study)、2)危險工況、3)交通事故。各數據來源對比情況如下表所示。

表1 :駕駛過程數據來源對比
當然,無論是基于上述哪種方法,或者綜合這兩種方法,也許都不是有關自動駕駛測試的終極問題(測試完備性)的答案;這有待更多有創造力的思考和嘗試。
1. 道路交通事故數據
FOT/NDS數據、危險工況數據在國內外文獻中很多見,在此不再敷述;最后一類交通事故由于其數據資源的特殊性,其可接近性相對較弱,以下對其進行深入分析。
交通事故數據一般來源于兩大方面:1)統計數據。交通管理部門在進行道路交通事故處置時,記錄的數據,包含事故基本信息、車輛信息、駕駛人信息等;2)深度數據。科研機構或行業組織開展深度事故研究時,所采集、分析、再現計算得到的數據等。
基于統計數據可以做宏觀層面的估計。統計數據主要是刻畫某個地域范圍內的事故整體特征,以典型的四項統計為例,就是事故起數、死亡人數、受傷人數和直接財產損失。而分類的角度一般涵蓋:事故的嚴重程度(死亡事故、一般事故、輕微事故)、事故的基本屬性(時間、地點、道路類型、肇事人員和車輛情況、傷亡人員情況、是否營運車輛等)。
深度數據則能揭示一些微觀的規律。基于單個事故案例,再現分析所有相關交通參與者在這個時間區間內、空間范圍內、交通環境和自然環境內的運動過程(即經典的“人-車-路-環境”系統),并進而分析其原因;從而在車輛工程、交通工程,及交通管理等角度探尋更好的解決方案或者優化方法。
由于資源總體總是有限的,這兩類交通事故數據呈現在單個事故的信息量和樣本數量這兩個維度上的狀態正好相反。基于交通事故統計數據的單個事故信息約為100條,而基于深度事故研究數據的單個事故信息約為3000條。在樣本數量方面,前者在我國每年約5萬多個,而一個大型機構每年能完成的深度事故分析約為500至1000個。其定性對比如下圖所示。
圖 2 統計數據和深度數據的數據量對比
2. 深度事故研究
深度事故研究數據,傳統來說是主要面向車輛工程的被動安全研究的,直接的應用是改進車身耐撞性設計、設計約束系統等,后來也逐漸被用于ESC、AEB等主動安全系統的應用效用的估計與驗證。
隨著ADAS和其他等級自動駕駛系統的發展,深度事故研究的方法也在隨之變化,通過追加關于“碰撞前5秒“的再現分析,數據可以被轉化為一個臨近碰撞條件的場景,進而可被用于測試相關ADAS功能在此情況下的避撞效果(從而估計安全收益)。
深度事故數據再現分析的基本順序是逆序,即從碰撞后的信息推導到碰撞時刻的狀態和條件,再推測碰撞前的狀態和條件。示意圖如下。
圖3:深度事故數據再現分析流程
再現分析所使用的基本方法是物理學定律,主要是碰撞力學(牛頓定律)。就分析工具而言,主要是上述定律的解析或圖解法,或在此基礎上運用PC-CRASH等軟件進行再現計算。
深度事故數據再現分析所需要的輸入信息主要包括:
事故現場的痕跡標記、信息采集和繪制的現場圖
事故車輛的內外部測量和分析
事故參與者的回訪
事故傷亡人員的傷情及治療信息等
固定點的監控視頻、車輛上的行車記錄儀數據和視頻或其他相關數據
深度事故數據再現分析的產出物主要包括:
數字化的比例復現的事故現場圖(AUTOCAD)
上述計算模型及結果(PC-CRASH)
數字化的事故信息和分析結論(數據庫)
3. 深度事故分析與自動駕駛
在自動駕駛開發及驗證過程中,常見的基于事故分析輸出物的應用包括以下兩種:
基于交通事故數據生成測試場景,一般采用聚類的方法,將同類型的事故數據和特征加以提煉,形成能體現該類型事故中的大多數情形的若干種典型工況,從而用于ADAS功能的測試與驗證。 例如可應用于行人AEB等功能的測試工況生成。
運用交通事故數據進行ADAS效用評價,在假設ADAS具有理想的感知、決策、執行系統的前提下,將該功能虛擬地將設置于事故沖突的雙方(或單方)車輛中,仿真計算其對事故避免或事故減輕的效用,如下圖所示。
圖 4:從交通事故到仿真場景
限于本文篇幅,本節不做更具體展開。如果有需要,可以在之后的推送中續篇。但顯然,上述兩類數據的應用,都無法直面自動駕駛測試完備性這一終極拷問。
4. 關于采用事故數據生成測試場景的一些思考
由于事故研究的基本方法是逆序分析,從結果(碰撞后的最末狀態)依據物理定理反推最合理的起因(碰撞前的最初狀態)。這里就存在兩個可能的誤差源:收集的信息的完整性和可靠性、分析過程的準確性和可靠性。
一個比較常被問到的問題是,從碰撞時刻向前反推碰撞前5秒的狀態時,所依據的信息是什么?
主要依靠對駕駛員的回訪(彼時采取了什么操作)和地面的痕跡(如有縱向/橫向的緊急操作)等。這方面信息的準確性和定量描述的精確性等都一定程度上存疑。
故而,再現分析結果的誤差也將作為輸入,不可避免地帶入到測試場景的問題中。
小樣本數據的外推性
前述所提及的深度事故樣本,由于單個樣本的研究成本非常高,故而樣本總數縱然積累十多年,仍然較為有限。這里衍生出幾個問題:
事故類型和形態會隨著快速發展的交通環境和參與者行為的變化而變化,單一以延長數據累計年份的方法而增加樣本數量,是否會使得數據所體現出來的問題本質存在有偏?
實際交通中的事故類型以不同的定義和研究目的進行劃分,總會分成若干類;以面向ADAS功能的測試為例,如果僅探討該功能所針對的特定場景,只會存在一小部分有效的事故樣本;故而,有效樣本數會進一步縮水。
由于目前覆蓋范圍最廣的國內研究機構也只能覆蓋5-7個城市(的局部區域),而國內不同地域范圍、不同城市等級的差異性又確實較大,所以基于這樣不大規模的深度事故數據的樣本的分析結果,是否有把握外推至全國范圍,仍然是個問號。
事故數據在自動駕駛測試中的適用性
以兩個比較典型的事故類型為例進行解釋。
追尾事故。追尾事故大多雖然并不十分嚴重,但確是一種常見的事故類型。由于沖突類型較為明晰,故很容易聚類歸納成為相關自動駕駛功能的測試用例或測試工況。
絕大多數的追尾事故的情景是由人類駕駛員的分心(疏于關注前車或路況)或及對前車的行駛狀態或趨勢的誤判(對速度或及加速度的誤判)而導致的,這種情況對于連續執行自動駕駛任務的車輛來說,是幾乎不會演變成這樣的沖突情景的,也即不會由其自身導致此類事故。
十字路口對向行駛時轉彎和直行車輛的沖突。如圖所示,這是國內常見的路口事故類型,在沒有單獨轉向紅綠燈控制的路口,雙方都可以通行。由于人類集中注意力時的水平視角有限(25度左右),A車駕駛員往往無法及時觀察到右側來車,或無法準確判斷對方車速/加速度等,從而導致碰撞事故。
圖 5:十字路口交通沖突
如果沒有特殊情況的視野阻擋,連續執行自動駕駛任務的車輛應比人類駕駛員有顯著的信息獲取能力(感知能力)的提升。當然,也必須承認“非受保護的左轉”對自動駕駛的決策系統(對態勢的評估和決策)也是頗具挑戰的。但大量從真實事故中提煉而得的此類測試場景是否能形成有效的測試用例,達到測試驗證的目的,并不是個顯而易見的結論。
人類駕駛員和交通事故的辯證關系
上周與達姆施塔特工業大學(TUD)的Prof.Winner交流的時候,他提出了以下觀點,人類駕駛員消解(compensate)了很多沖突的危險,從而避免了交通事故。
確實,談起人類駕駛員,言必稱90-95%左右的交通事故都是由于駕駛員本人的失誤造成的。這些“失誤”五花八門,分心、疲勞駕駛、酒后駕駛、駕駛經驗或技能不足(特別是緊急或極限工況下)等等。而自動駕駛似乎被看作是解決這些“人類失誤”一勞永逸的解決方案。
事故中的大部分必將被自動駕駛所避免,那人類駕駛員已經compensate的那些危險沖突呢?自動駕駛是否也“全權代勞”了?該如何驗證?
圖6:人類駕駛員的駕駛狀態;上文探討的是其中“事故工況”的部分,而磚紅色的“危險沖突情況”的部分,是在真實交通中被駕駛員消解的危險。
前兩年,Prof.Winner還提出過另外一個問題,啟發了大家的思考;在此也再轉述分享一下:當自動駕駛更多地融入了真實交通后,勢必會帶來新的critical scenarios和新的accidents。從事故研究的角度,也應該對此做好充分的準備和預估,并隨時投入新的研究中,為自動駕駛的研發提供更好的反饋。
圖 7:自動駕駛測試風險場景(摘自(How) can we validate safety of automated driving | Prof. H. Winner | Tongji | May 23, 2017)
5. 附:國內開展深度數據研究的主要機構
國內目前比較大規模的深度事故研究的方法、模式、數據庫結構均脫胎于GIDAS。具體內容這里不再敷述,簡要信息總結于下表。如果沒有這些團隊的辛勤工作,我們對如何在國內開展自動駕駛測試,可能會更迷茫一些。
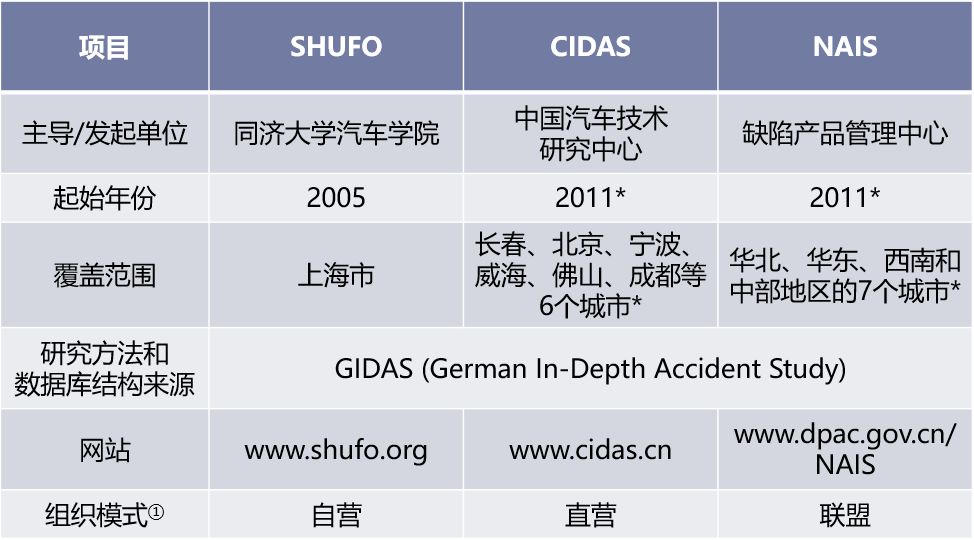
表2:國內主要深度事故研究機構
-
adas
+關注
關注
311文章
2330瀏覽量
211939 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179910
原文標題:交通事故數據在自動駕駛中的應用
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛汽車如何實現自動駕駛

2026年自動駕駛汽車發展趨勢前瞻

自動駕駛汽車能夠識別出交警指揮手勢嗎?

自動駕駛系統在遇到事故時是應該起作用還是立刻退出?

自動駕駛事故如何判定?誰應負主要責任?

數據驅動自動駕駛:核心要素與發展全景解析


自動駕駛汽車是如何準確定位的?




 工商網監
工商網監
評論