 羞羞的機器學習學術研究項目分解
羞羞的機器學習學術研究項目分解

現在,機器學習已經應用在各行各業中,開發工程師隊伍越發壯大,其中有一類工程師的工作內容在外行人眼里似乎更”豐富多彩“,那就是鑒黃師。現在我們看到的視頻都是經過他們本人或他們研發的技術處理而來。就在大家致力從音、言、畫等全方位鑒黃時,有一個逆風而上的團隊,正在利用機器學習研究著一項非同一般的任務。
剛拿到這篇論文的時候,營長是拒絕的,畢竟原文作者都沒有署名。目前就知道這項史無前例的工作是由德國一家公司 Very Intelligent Ecommerce Inc 委托進行的,并將研究和調研成果應用到項目 Autoblow AI 中,旨在使他們的成人智能玩具更加人性化。(關于這個項目大家可自行搜索了解更多... ...)
下面營長還是”竭盡所能“地為大家介紹一下這項羞羞的機器學習學術研究項目。研究人員通過分析并標記超過 108 小時的愛情動作視頻,利用聚類分析發現了 16 種”典型“或”常見“的 blowjob(以下簡稱 bj)動作片段,以此設計和評估一個通過使用深度學習來生成完整全過程 bj 的系統。這個系統優于簡單的馬爾科夫鏈模型。雖然內容敏感,但,是真學術!(一本正經臉)欲知詳情,下文繼續為你分解。
數據集
我們將獲取到的色(xue)情(xi)視頻進行剪切,處理后僅包含 bj 的片段。然后手動對這些片段進行標注,并記錄下嘴巴的位置信息序列,該位置記錄為整數,其中1000和0分別表示尖端和基部。(向數據標注工程師獻上我的膝蓋)
為了便于研究,我們使用線性插值技術將視頻和標注標準化為每秒16幀,最終把視頻中剪切出來的1060個剪輯處理成6270467個標準化幀,這1060個剪輯由109個小時的視頻中所得來。
動作分析
對 Autoblow AI的設定程序有一個基本的了解有助于分析此項研究。Autoblow AI有十種模式,每一種模式都代表著一系列的動作。上或下運動速度的不同就產生了不同的動作,其中速度可用電機來控制。兩到三個不同的動作連續釋放也可以創造出復雜的動作模式。圖 1 給出了一個基于三種動作模式的分析例子:
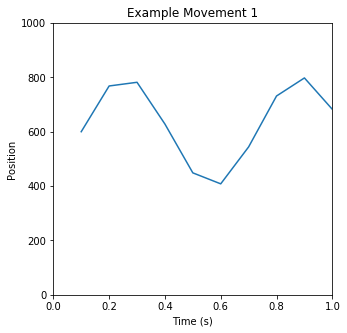


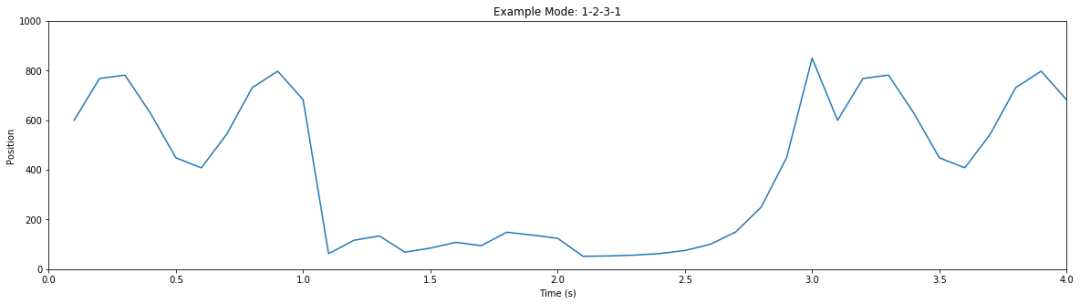
圖 1 基于三種不同模式而創造出的復雜模式示例
我們能夠清楚地看到運動具有周期性以及隨著時間的變化動作的狀態情況,其中包括停頓和中斷。基于上千個這類的片段,我們能夠構建模型來識別數據集中常見或典型的動作。
k 均值聚類
我們首先使用k均值聚類算法來進行研究,該算法雖然存在很多缺點,但是它的運算速度快。
我們將每個視頻分割成一個個一秒鐘的窗口,按每個窗口的位置序列給出一組16維的向量。之后采用k均值來找到16個聚類。下圖 2 和 3 給出了每一個類別位置序列的平均值,以及每一個類別中100個樣本的具體位置序列。
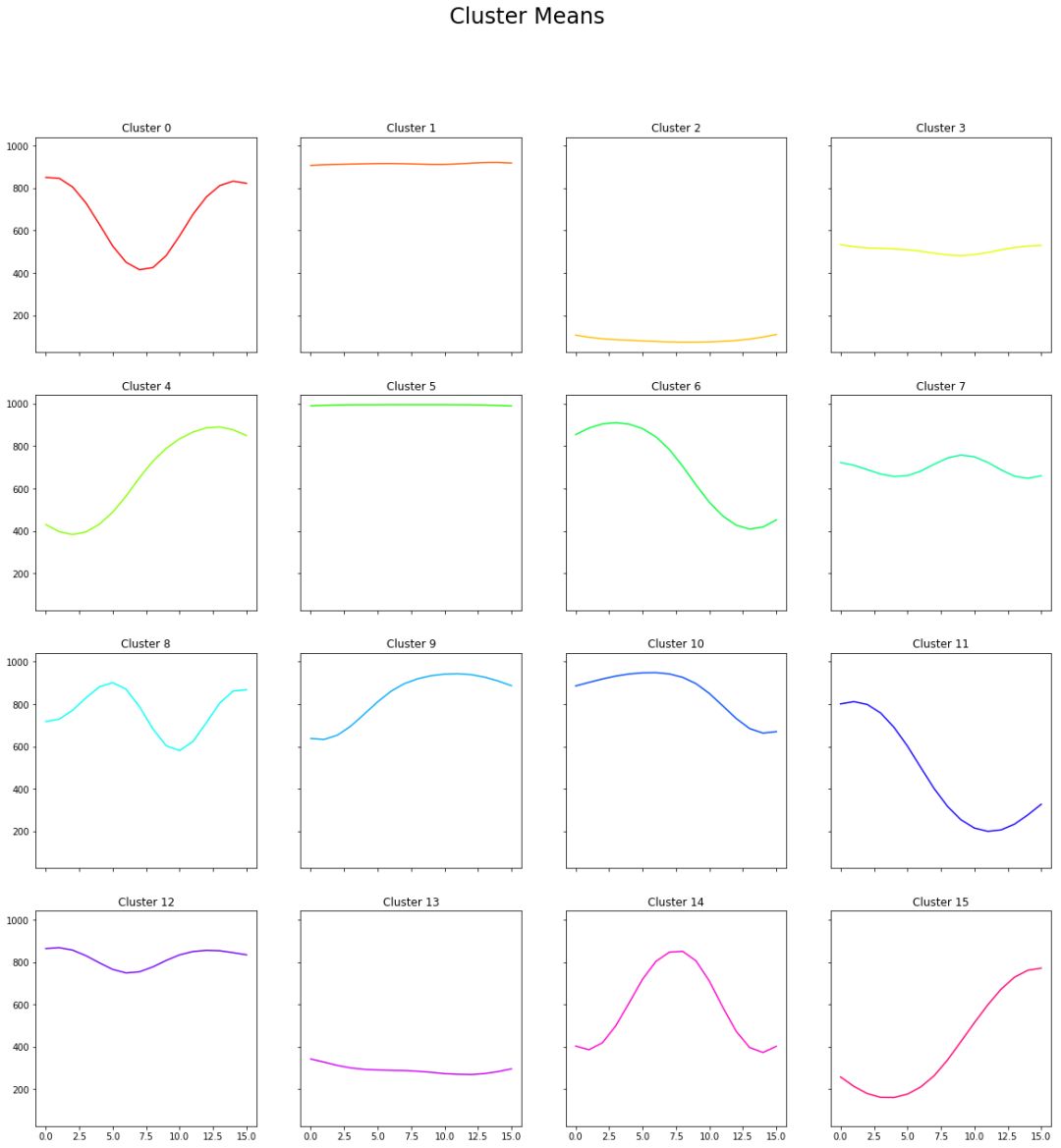
圖 2 16 種類別中嘴位置序列的平均值
圖 3 每一類別上100個樣本中嘴的具體位置序列
為了進一步驗證我們的假設,我們使用了最近開發的一種被稱為UMAP的降維技術來減少聚類的數量,以便能在二維和三維中對數據進行可視化。其結果如圖 4 所示。
圖 4 使用 UMAP 降維后數據的分布圖
我們能從圖中看到許多令人信服的結構。比如類別5和類別2的數據,它們分別代表著在頂部和底部附近進行活動,而圖中這兩類數據也是處在相互對立的點上。再比如類別1和5的數據,它們都代表著在頂部進行活動,圖中這兩類數據正好也是彼此相鄰。我們還能從圖中觀察到一條介于兩端點之間密集的線,這條線貫穿了所有表示低強度的動作(5,12,7,3,13,2)的數據點,這一結構也與現實中 bj時,從最高點到最低點來回活動相符。
這個圖表值得我們去細細分析,在目前這些驗證就足以讓我們去相信數據之間是呈現出某種趨勢的。這些數據能夠為我們建立更加復雜的動作模型做支撐。
程序生成
如上所述,一個完整的 bj過程是由一系列的動作來組成的。在上一節中,我們已經確定了在一秒鐘內發生的典型動作。下一步我們要做的是找到這些動作之間常見的演變順序。
這個問題與自然語言中‘猜猜下一個詞會是啥’的問題有頗多相似之處。以下漫畫最能說明這個問題。
我們希望從上一節中構建出來的模塊來組成一個典型的 bj過程。我們首先建立了一個以馬爾可夫鏈為基線的簡單模型,之后又設計了一個深度學習模型來作為替代,并定量比較了兩種模型的優劣。
馬爾可夫鏈模型
馬爾可夫鏈背后的原理很簡單:假設下一步的動作僅取決于當前的位置,而不是先前的動作。例如:假設我們剛剛完成了動作1;在此基礎上,我們知道我們再次做動作1的概率為50%,30%的概率做動作2,15%的概率做動作3,等等。然后根據概率隨機選擇下一個動作來生成一個‘唯一’的動作順序。
因此,我們先計算了一個模式由另一個模式引起的頻率,并驗證了此概率與直覺相符。之后采用這些概率生成唯一的動作順序,并使用簡單的移動平均進行平滑處理。結果如下圖 5 所示。
圖 5 一個由馬爾可夫鏈模型生成的完整‘不可描述動作’ 過程
馬爾可夫鏈的問題很明顯,就是假設下一狀態的概率僅取決于當前的狀態。而事實上,下一狀態的概率會取決于先前的許多狀態。
另一個問題是在預測下一狀態時,還需知道先前狀態哪一個對下一狀態影響最大。深度學習能夠在“復雜又非顯而易見相關性”的問題上大展身手。
Dense Neural Network (DNN) 模型
在本節中,我們設計了一個DNN架構,該架構能夠基于先前的狀態預測出下一步的狀態。
本文中,使用了一個簡單的兩層體系結構,把最后的16種狀態作為模型的輸入,輸出為范圍在0到1之間的關于16種狀態的概率值。用零矢量來表示“缺失”狀態(如視頻開始前的一小段)。通過縱向連接先前的狀態向量來創建輸入,以交叉熵作為損失函數,訓練數據與測試數據的比值為8:2。
模型性能的好壞很大程度上取決于訓練數據與測試數據的切分情況,為了解決這一隨機誤差帶來的影響,我們重復了10次試驗,每次都使用不同的隨機種子來分割數據。下面我們將定性地分析一個由模型產生的動作演變順序(如圖 6 所示)。
圖 6由 DNN 模型產生的一個完整 bj過程
模型比較
在本節中,我們將定量地分析這兩種模型。定性地說,DNN模型具有更好的魯棒性,因為它被鎖定在單一狀態下的可能性要小很多。對于預測來講,首先要考慮的是預測的準確性。圖 7 表示DNN在不同任務上的預測準確率。
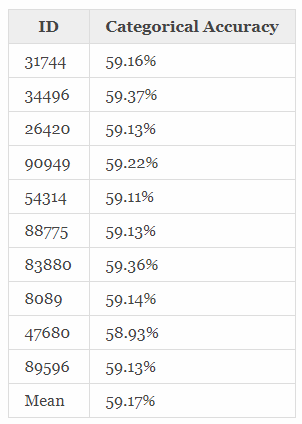
圖 7 DNN 在不同任務上的預測準確率
通過計算得到的馬爾可夫鏈模型的準確率約為58.08%,略低于神經網絡的平均精度。
為了證明結果的可信度,我們還引入了“相對錯誤”這一度量指標。下面給出一個小例子以便理解相對錯誤。當你在預測是否會下雨時,如果回答百分百下雨,但結果沒下雨,那么你的預測就完全錯誤。但如果你預測百分之八十下雨,結果沒下雨,那么意味著你只錯了百分之八十。
根據這一思路,我們重新計算了兩種模型的平均絕對誤差,DNN模型的誤差如圖 8 所示,而馬爾可夫鏈模型的誤差計算結果為1.126。從這一結果也能表明DNN模型優于馬爾可夫鏈模型。
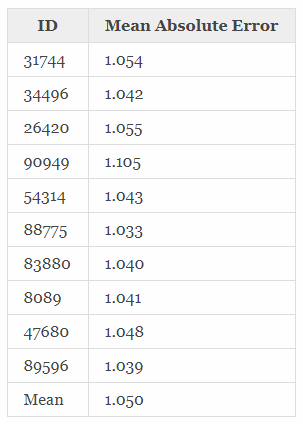
圖 8 DNN 模型在不同任務上的平均絕對誤差
未來的研究
第一,我們相信程序生成能夠被改善。DNN架構的替代方案包括循環神經網絡、卷積神經網絡和生成對抗網絡。我們之后打算使用這些技術來改善動作演變順序的真實性。當然,演變順序得以物理硬件的限制為前提。
第二,我們認為類似的分析可以適用于其他情色行為,本文中以 bj 為主題,服務于Autoblow AI。
第三,我們希望能將研究擴展到圖像識別和視頻分類中去。現在我們已經開發出一個可用于識別靜止幀中是否存在 bj行為的模型,并且正在研究更為復雜的視頻分析問題。接下來研究的重點會著眼于如何將性玩具與色情內容實現同步。
-
圖像識別
+關注
關注
9文章
533瀏覽量
40055 -
機器學習
+關注
關注
66文章
8553瀏覽量
136934
原文標題:關于那些羞羞的不可描述的動作分析,一個正經的機器學習項目
文章出處:【微信號:rgznai100,微信公眾號:rgznai100】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
資料] 汽車軟件質量躍遷的系統性路徑:基于ISO 26262標準的單元測試體系重構與中日實踐深度對比(2026學術研究報告)
工程領域學術研究的基本規律和原則
【MiCOKit申請】學術研究開發
【瑞芯微RK1808計算棒試用申請】基于機器學習的視覺機械臂研究與設計
怎樣去設計一種基于PLC的搬運機器手控制系統
什么是機器學習?機器學習能解決什么問題?(案例分析)
機器學習研究中的四大危機是什么?
NVIDIA在西雅圖開設機器人研究實驗室,聚集跨學科研究團隊
機器學習所需的數學知識你能夠有效使用嗎
蘋果在人工智能和機器學習領域屬于“后來者”
六個構建機器學習模型需避免的錯誤
基于Spark的學術論文熱點數據挖掘方法
深度學習頂級學術會議ICLR 2023錄用結果已經公布!
機器學習筆記之優化-拉格朗日乘子法和對偶分解




 工商網監
工商網監
評論