 安川工業機器人模擬仿真軟件MotoSimEG-VRC教程教材的介紹
安川工業機器人模擬仿真軟件MotoSimEG-VRC教程教材的介紹

安川工業機器人應用技能必讀!
本書特點
1.內容全面,剪裁得當
本書介紹安川工業機器人仿真軟件MotoSimEG-VRC 在安川機器人仿真領域的應用功能。為了在有限的篇幅中提高知識集中度,對所講述的知識點進行了精心剪裁。采取的具體方法有兩點:①對軟件中菜單及功能一一介紹,但不重復;②次要生僻知識點,只做簡單說明,這樣既節省了篇幅,也提高了讀者的學習效率。
2.實例豐富,步步為營
對于安川機器人仿真軟件,力求避免空洞的介紹和描述,而是通過實例說明各個功能如何使用,實例的種類也很豐富,有講解的小實例,有幾個知識點或全章、幾章知識點相結合的綜合實例,更有完整的工程實例,各個實例交錯講解。每章后配合學習檢測,并附有參考答案講解,達到鞏固讀者理解的目的。
3.例解與圖解配合使用
本書最大的特點是“例解+ 圖解”:“例解”是指拋棄傳統知識點的鋪陳方法,直接讓讀者自己動手去操作,使本書的操作性強,更容易上手,也避免枯燥;“圖解”是指多圖少字,圖文結合,使本書的可讀性大大提高。
點擊圖片購買
本書以安川(YASKAWA)工業機器人作為對象,介紹使用安川公司的機器人仿真軟件MotoSimEG-VRC進行工業機器人的基本操作、功能設置、方案設計和驗證的學習。中心內容包括:認識、安裝工業機器人仿真軟件;各個菜單中工具的使用;如何使用MotoSimEG-VRC在工業機器人焊接、噴涂、碼垛、打磨等項目中構建系統;宏程序、高速傳送等功能在仿真中的使用。
通過本書學習可使讀者熟練使用安川工業機器人仿真軟件MotoSimEG-VRC,掌握工業機器人虛擬示教、工業機器人工作站布局、工業機器人工作姿態優化,確認系統方案、工業機器人型號、工業機器人/工件安裝位置、工業機器人動作范圍和可達到性等,進而對夾具提出修改意見等全面、系統的仿真應用技能;使讀者了解工業機器人離線編程仿真方法,掌握利用相關建模操作來組建常見工業機器人工作站的方法和步驟。
拖動右側滾動條可以查看全目錄
▼
前言
第1章 認識、安裝工業機器人仿真軟件 1
1.1 了解什么是工業機器人仿真應用技術 1
1.2 安裝工業機器人仿真軟件MotoSimEG-VRC 2
1.3 MotoSimEG-VRC 的軟件授權 2
1.4 MotoSimEG-VRC 的軟件界面介紹及作用 3
學習檢測 4
第2章 MotoSimEG-VRC 系統設置 7
2.1 創建機器人系統7
2.2 設置系統選項21
2.3 平移、旋轉等操作22
學習檢測 23
第3章 Home 菜單中的工具使用 27
3.1 編輯和示教工具27
3.2 視圖工具34
3.3 模型工具35
3.4 拾取工具37
3.5 屏幕工具38
3.6 測量等工具38
3.7 操作工具39
學習檢測 40
第4章 Controller 菜單中的工具使用 46
4.1 示教器編程工具46
4.2 程序創建工具51
4.3 文件設置工具54
4.4 工業機器人系統設置工具 55
4.5 外部設備工具57
學習檢測 59
第5章 Simulation 菜單中的工具使用 68
5.1 播放工具68
5.2 I/O 變量等監視工具70
5.3 碰撞檢測工具75
5.4 腳本管理工具79
5.5 I/O 事件工具80
5.6 噴涂設置工具83
5.7 動畫輸出工具85
5.8 調試工具86
5.9 在線功能工具88
學習檢測 90
第6章 系統的創建及應用 94
6.1 創建帶導軌及外部軸的工業機器人系統 94
6.2 創建帶協調的工業機器人系統 104
6.3 創建帶CAM 功能的焊接機器人系統 108
6.4 創建不帶CAM 功能的焊接機器人系統 116
6.5 創建帶傳送帶同步的工業機器人系統(噴涂) 117
6.6 創建碼垛機器人系統126
6.7 創建打磨機器人系統131
學習檢測 141
第7章 MotoSimEG-VRC 的特殊應用 144
7.1 MotoSimEG-VRC 高速傳送帶搬運操作 144
7.2 MotoSimEG-VRC 宏程序 154
學習檢測 159
-
PCB設計
+關注
關注
396文章
4921瀏覽量
95273 -
程序
+關注
關注
117文章
3846瀏覽量
85240 -
工業機器人
+關注
關注
91文章
3534瀏覽量
98184 -
仿真軟件
+關注
關注
21文章
281瀏覽量
31848 -
可制造性設計
+關注
關注
10文章
2066瀏覽量
16461 -
華秋DFM
+關注
關注
20文章
3515瀏覽量
6401
原文標題:采用“例解+ 圖解”的方式,講解安川機器人模擬仿真軟件!
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
集成多摩川磁性編碼器的伺服電機與機器人關節設計創新
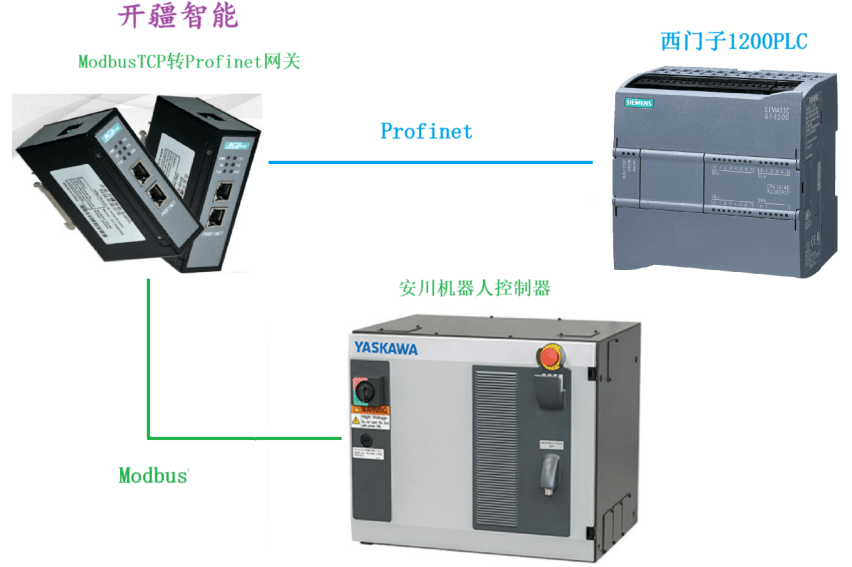
開疆智能ModbusTCP轉Profinet網關連接安川YRC1000機器人配置案例
工業機器人線束揭秘 | 性能加持助力機器人作業效率穩定躍升

工業機器人的特點
工業通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信

工業機器人與協作機器人概念不同

工業智能網關能從安川機器人中采集哪些數據

盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
智造升級新引擎:具身智能工業機器人仿真軟件推薦與富唯智能的突圍之道



 工商網監
工商網監
評論