 本田展示了一個最新版本的ASIMO機器人
本田展示了一個最新版本的ASIMO機器人

15年前,本田公司第一次向世界展示了自己的人形機器人ASIMO,其流暢的雙腳行走方式讓人為日本在仿生機器人領域所取得的進展感到驚訝。而經過這么多年的后續發展,ASIMO也早已具備了更多功能。
本田展示了一個最新版本的ASIMO機器人,其最大的亮點在于手部活動的突破。據介紹,新版本ASIMO的每只手都擁有13個自由運動軸,憑借這一點,它已經能夠成為一個合格的手語表演者。
同時,本田的研究人員還對ASIMO的下肢進行了改進,現在的新版本機器人擁有更好平衡性,能夠更快、更平穩的攀爬樓梯。
總的來說,ASIMO現在已經可以完成很多類似人類活動的工作,而本田的最終目標是讓他進入民眾家庭并承擔諸如幫忙照顧嬰兒、老人以及殘疾病人這樣日常工作,真正變成家里人的好幫手。
ASIMO罰點球的姿勢與人類非常相似
要控制ASIMO的行走姿態,工程師需要實現以下三個方面的控制:
1. 水平反應控制:在不平整的地面上運動時可以保持平衡。
2. 目標ZMP控制:當機器人不能站穩開始跌倒時,它可以向相反的方向調整自己的上半身位置以避免倒下。于此同時,它也會向前加快速度以快速平衡下降趨勢。
3. 步長位置控制:當目標ZMP控制激活時,它調整機器人的步長讓身體的姿態和運動速度和步長保持在正確的相對水平上。
另外,通過本田研發的I-Walk技術(智能實時靈活行走技術),ASIMO還實現了預測運動控制,讓ASIMO可以根據當前速度在轉彎前計算轉彎的向心力,并得出最佳的轉彎角度,避免機器人跌倒,因為這個過程是實時的,所以ASIMO可以不用停頓就完成轉彎過程,這一點目前絕大多數人類機器人都還無法辦到。
除了運動能力,本田也在不斷加強ASIMO對壞境的感知能力。最新一代ASIMO配置有兩個攝像頭眼睛(視覺傳感器)、由激光傳感器和紅外傳感器結合而成的接地傳感器(用于探測地面的地面上的障礙物)、可以測出周圍三米范圍內物體的超聲波傳感器和用于控制力度的壓力傳感器等。這些部件加上強大的算法,可以識別移動物體和障礙物、手勢和身體姿態、壞境、不同的聲音來源和人臉,并能根據所得到的信息繪制環境地圖并確定行動路徑和下一步動作。
-
機器人
+關注
關注
213文章
31078瀏覽量
222205 -
本田
+關注
關注
2文章
349瀏覽量
21127
原文標題:驚嘆!日本本田機器人雙手靈活可做手語!
文章出處:【微信號:robotplaces,微信公眾號:機器人創新生態】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
芯科科技發布Simplicity Studio 6軟件開發套件最新版本SiSDK 2025.12.0
蔚來世界模型NWM全新版本正式推送
如何使用新版本J-Flash編程CW32 MCU
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
工業機器人的特點
戴爾數據保護軟件迎來全新版本
全新AMD Vitis統一軟件平臺2025.1版本發布
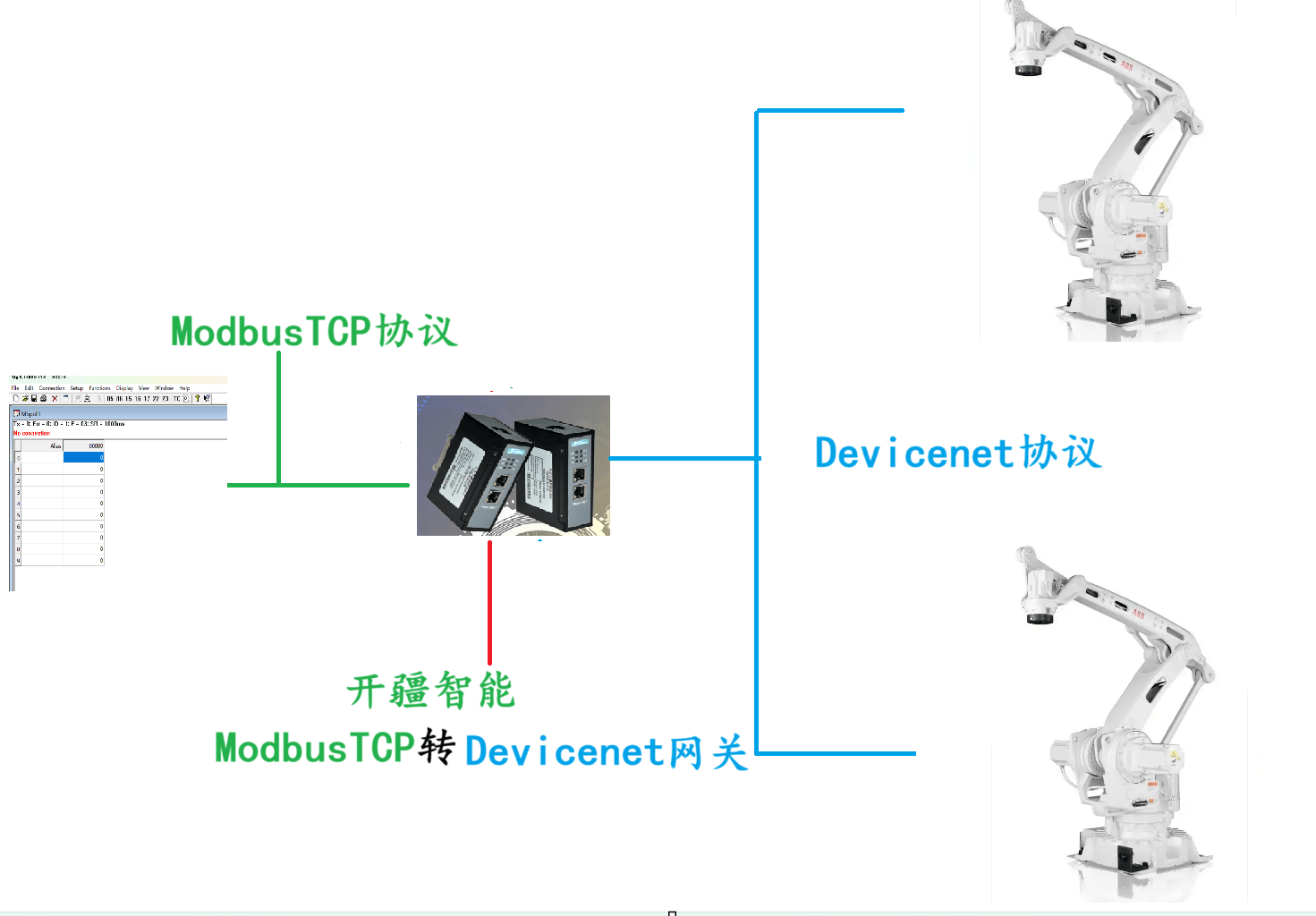
開疆智能ModbusTCP轉Devicenet網關連接ABB機器人配置案例



 工商網監
工商網監
評論