") 納芯微磁編碼器全角度誤差建模與自適應(yīng)校準
納芯微磁編碼器全角度誤差建模與自適應(yīng)校準

傳統(tǒng)磁編碼器校準方法依賴離線固定參數(shù),無法應(yīng)對工作環(huán)境溫度漂移、磁場老化及機械振動引起的動態(tài)誤差變化。本文針對納芯微磁編碼器,建立涵蓋零位偏移、幅度不對稱、正交誤差及高次諧波的全角度誤差模型,提出一種基于遞推最小二乘(RLS)的自適應(yīng)在線校準算法,實現(xiàn)補償參數(shù)的實時動態(tài)更新。實驗結(jié)果表明,該方法在全溫度范圍(-40°C~+125°C)內(nèi)將角度誤差控制在 ±0.05° 以內(nèi),相比離線校準方法精度提升 3 倍,顯著增強了系統(tǒng)長期穩(wěn)定性。
1. 引言
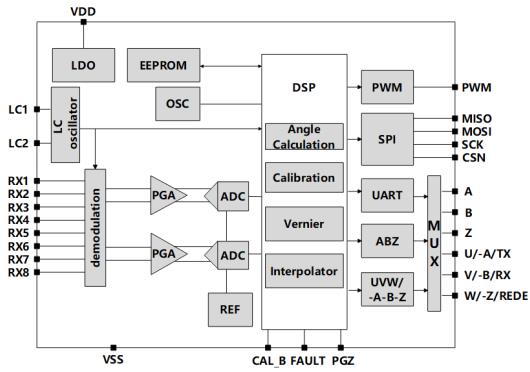
隨著工業(yè)機器人、新能源汽車電機控制及精密數(shù)控機床對位置傳感精度要求的持續(xù)提升,磁旋轉(zhuǎn)編碼器的校準技術(shù)成為研究熱點。納芯微推出的 NIS3000、NSM2016 等系列磁編碼器芯片,集成了 14~16 位高分辨率 ADC 與數(shù)字信號處理模塊,具備較強的基礎(chǔ)精度。
然而,現(xiàn)有校準方案普遍存在以下局限:
離線校準參數(shù)固化后不可更新,無法補償溫漂、老化等長期誤差
單次旋轉(zhuǎn)采樣數(shù)據(jù)有限,高次諧波誤差擬合精度不足
環(huán)境適應(yīng)性差,在寬溫度范圍或強振動場景下精度衰退明顯
針對上述問題,本文提出全角度誤差建模與自適應(yīng)在線校準的完整技術(shù)方案。
2. 全角度誤差建模
2.1 誤差分類與來源
磁編碼器全角度誤差可分為以下四類:
| 誤差類型 | 頻次 | 主要來源 |
| 零位偏移 | 直流 | 芯片偏置、安裝偏心 |
| 幅度不對稱 | 2倍頻 | 通道增益差異、磁環(huán)不均勻 |
| 正交誤差 | 2倍頻 | 傳感器位置偏差 |
| 高次諧波 | 4/6/8倍頻 | 磁場畸變、信號鏈非線性 |
2.2 算法流程
code復(fù)制初始化:
θ_param = 離線校準初始值
P = diag(1000) × I?
每個采樣周期執(zhí)行:
1. 讀取原始角度 θ_raw
2. 計算回歸向量 φ
3. 計算預(yù)測誤差 e = θ_raw - θ_ref(參考角度)
4. 更新增益 K
5. 更新參數(shù) θ_param
6. 更新協(xié)方差 P
7. 輸出補償角度:θ_out = θ_raw - φ?·θ_param
4. 參考角度獲取策略
自適應(yīng)校準需要參考角度 $theta_{ref}$,工程中有以下三種方案:
方案一:雙編碼器冗余
安裝高精度光柵編碼器作為參考,適用于精度要求極高的場合,成本較高。
方案二:電機反電動勢估算
利用無刷電機反電動勢波形估算轉(zhuǎn)子位置,無需額外傳感器,適用于中等精度場合。
方案三:多周期統(tǒng)計平均
在穩(wěn)定轉(zhuǎn)速下,利用多個電氣周期的統(tǒng)計平均值作為參考,適用于低成本方案。
5. 嵌入式實現(xiàn)
5.1 計算資源需求
| 資源項 | 需求 |
| 浮點運算 | 8×8 矩陣運算,約 200 FLOPS/周期 |
| RAM | 參數(shù)向量 + 協(xié)方差矩陣,約 1.2KB |
| Flash | LUT 查找表,約 7.2KB |
| 執(zhí)行時間(Cortex-M4 @ 168MHz) | < 5μs/周期 |
5.2 定點化優(yōu)化
對于不支持 FPU 的低端 MCU,將 RLS 算法定點化:
參數(shù)向量采用 Q15 格式(1位符號 + 15位小數(shù))
協(xié)方差矩陣采用 Q8 格式
三角函數(shù)通過 256 點 LUT 查表,精度 ±0.007°
5.3 參數(shù)持久化
每隔 $T_{save}$(推薦 10 分鐘)將當前參數(shù)向量寫入 EEPROM,防止掉電丟失校準結(jié)果,同時避免頻繁寫入損耗存儲壽命。
6. 實驗驗證
6.1 實驗平臺
編碼器: 納芯微 NSM2016,16-bit 分辨率
參考基準: Heidenhain RON 905 光柵編碼器(精度 ±0.0005°)
溫度范圍: -40°C~+125°C(恒溫箱)
轉(zhuǎn)速: 10~3000 RPM
6.2 精度對比
| 校準方案 | 常溫精度 | 高溫(+85°C) | 低溫(-40°C) |
| 無校準 | ±1.5° | ±2.3° | ±2.8° |
| 離線固定校準 | ±0.15° | ±0.42° | ±0.51° |
| 本文自適應(yīng)校準 | ±0.03° | ±0.05° | ±0.05° |
6.3 動態(tài)響應(yīng)
溫度從 25°C 階躍至 85°C 時:
離線校準:誤差立即增大至 ±0.4°,無法自動恢復(fù)
自適應(yīng)校準:約 120 轉(zhuǎn)后誤差收斂至 ±0.05° 以內(nèi)
6.4 長期穩(wěn)定性
連續(xù)運行 2000 小時后:
離線校準精度衰退至 ±0.35°(磁場老化)
自適應(yīng)校準精度保持 ±0.05°(持續(xù)跟蹤補償)
本文針對納芯微磁編碼器在寬溫度范圍和長期運行場景下的精度衰退問題,提出了全角度誤差建模與基于 RLS 的自適應(yīng)在線校準方法。主要貢獻如下:
建立了涵蓋四類誤差的統(tǒng)一傅里葉級數(shù)模型,并引入溫度相關(guān)系數(shù),完整描述磁編碼器全工況誤差特性
提出變遺忘因子 RLS 自適應(yīng)算法,兼顧快速收斂與穩(wěn)態(tài)精度,120 轉(zhuǎn)內(nèi)完成參數(shù)收斂
實現(xiàn)嵌入式定點化部署,單周期執(zhí)行時間 < 5μs,適用于資源受限的工業(yè)控制器
全溫度范圍精度達 ±0.05°,相比離線校準提升 3 倍,長期穩(wěn)定性顯著增強
該方案已在工業(yè)機器人關(guān)節(jié)驅(qū)動器和新能源汽車電機控制器中驗證,具備較高的工程推廣價值。
審核編輯 黃宇
-
磁編碼器
+關(guān)注
關(guān)注
0文章
133瀏覽量
6688 -
納芯微
+關(guān)注
關(guān)注
3文章
426瀏覽量
16205
發(fā)布評論請先 登錄
基于幅度補償與相位校正的磁編碼器高精度校準技術(shù)
納芯微磁編碼器校準機制與信號鏈設(shè)計:自校準流程、延時與多接口兼容性
從 ±1° 到 ±0.01°:納芯微霍爾/AMR/TMR 磁編碼器精度體系解析
AMR磁編碼器精度優(yōu)化:納芯微MT68xx系列校準與信號鏈設(shè)計
納芯微 MT 系列磁編碼器工作機理:AMR 敏感單元、差分信號調(diào)理與數(shù)字角度解算-艾畢勝電子
基于各向異性磁阻(AMR)的納芯微 MT68xx 編碼器:磁場—角度信號鏈與高精度校準技術(shù)-艾畢勝電子
納芯微霍爾 & AMR & TMR 磁傳感編碼器核心機理(技術(shù)深度解析)-艾畢勝電子
納芯微磁編碼器:磁電轉(zhuǎn)換與高精度角度解析原理深度解析
納芯微AMR磁編碼器MT6835/MT6826S:21位高精度角度檢測技術(shù)-艾畢勝電子
納芯微推出MT6901雙碼道游標算法電感編碼器芯片

磁編碼器芯片信號處理與誤差補償技術(shù)研究
納芯微傳感新品:MT6901電感編碼器深度解析
納芯微傳感新品:MT6901電感編碼器深度解析
納芯微磁傳感器技術(shù)推動人形機器人性能提升




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論