") 人形機器人頸部關(guān)節(jié)靜電浪涌全鏈路防護解決方案
人形機器人頸部關(guān)節(jié)靜電浪涌全鏈路防護解決方案

方案背景與設計邊界
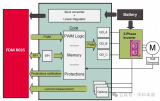
人形機器人頸部關(guān)節(jié)是整機視覺、環(huán)境感知的核心承載單元,集成了伺服驅(qū)動、高精度編碼器、IMU 慣性傳感器、多軸力矩傳感及高速通信總線,同時承擔俯仰、偏航、滾轉(zhuǎn)三自由度運動控制,具備空間緊湊、強弱電集成、敏感器件密集、人機交互頻次高的核心特點,是靜電放電(ESD) 和浪涌沖擊的高風險區(qū)域。
雷卯電子本方案基于行業(yè)主流48V直流母線人形機器人平臺設計,完全符合 IEC 61000-4-2(ESD)、IEC 61000-4-5(浪涌)、GB/T 17626.2 等標準,實現(xiàn)接觸放電±8kV、空氣放電 ±15kV 無性能降級,基本浪涌沖擊無硬件損壞的防護能力,覆蓋電源、驅(qū)動、傳感、通信全鏈路。

頸部關(guān)節(jié)的核心電氣規(guī)格如下:
模塊 | 核心參數(shù) | 功能說明 |
| 主供電母線 | 48V DC(39V~54V 寬壓范圍),峰值功率 100~300W,持續(xù)電流 2~6.3A | 伺服電機主功率輸入,適配人形機器人電池供電系統(tǒng) |
| 次級電源軌 | 12V(柵極驅(qū)動、制動回路)、5V(傳感器、外設接口)、3.3V(MCU、通信總線) | 控制與感知系統(tǒng)供電,多級DC-DC/LDO 轉(zhuǎn)換 |
| 功率驅(qū)動 | 三相MOSFET逆變橋,耐壓≥100V,Rds (on)<30mΩ | PMSM/BLDC 伺服電機 FOC 矢量控制 |
| 傳感單元 | 17位絕對式編碼器(SSI/BiSS 接口)、6 軸 IMU、三軸力矩傳感器 | 位置、速度、姿態(tài)、力反饋閉環(huán)控制 |
| 通信接口 | CAN FD總線、RS422差分接口 | 與主控制器的高速、低延遲數(shù)據(jù)交互 |
二
靜電浪涌失效風險核心來源
1. 靜電放電 (ESD) 核心風險
·人機交互引入:頸部是機器人與人視覺交互的核心區(qū)域,人體觸摸、衣物摩擦產(chǎn)生的HBM人體模型靜電(150pF+330Ω),峰值電壓可達15kV以上,直接通過外殼縫隙、接口線纜侵入電路。
·內(nèi)部摩擦起電:關(guān)節(jié)旋轉(zhuǎn)運動中,減速器、線纜、滑環(huán)的摩擦產(chǎn)生CDM帶電器件模型靜電,直接損傷編碼器、傳感器等敏感芯片。
·空間耦合干擾:電機PWM開關(guān)產(chǎn)生的高頻輻射,耦合到敏感信號線,形成等效ESD脈沖,導致傳感器數(shù)據(jù)跳變、MCU死機。
2. 浪涌沖擊核心風險
·電機反向電動勢:頸部關(guān)節(jié)急停、換向時,感性負載產(chǎn)生的電壓尖峰,峰值可達母線電壓的2~3倍,直接擊穿MOSFET、驅(qū)動芯片。
·電源總線擾動:整機多關(guān)節(jié)聯(lián)動時,負載突變引發(fā)的母線浪涌,通過電源路徑侵入關(guān)節(jié)控制板。
·外部電源注入:充電、調(diào)試時,外部電源引入的電網(wǎng)浪涌,通過總線傳導至關(guān)節(jié)模塊。
三
全鏈路防護方案設計

(一)48V主電源端口靜電浪涌防反接電路

雷卯電子選用SMBJ58CA對48V直流電源接口進行靜電浪涌基礎保護,滿足39V~54V的寬電壓輸入,滿足IEC61000-4-2,等級4,接觸放電8KV,空氣放電15KV。滿足IEC61000-4-5浪涌高等級測試需選用大功率器件,前端PTC提供過流防護,D1和D2實現(xiàn)電機反電動勢泄放。
(二)功率驅(qū)動與MOSFET防護電路
頸部關(guān)節(jié)伺服驅(qū)動采用三相全橋逆變拓撲,MOSFET是核心功率器件,是浪涌沖擊的高風險單元,本方案的防護設計覆蓋柵極、漏源極、驅(qū)動回路全路徑。
1、MOSFET 選型基準
針對頸部關(guān)節(jié)100~300W 功率等級,推薦MOSFET 選型參數(shù)如下:
·耐壓:≥100V,為 48V 母線提供 2 倍以上的電壓裕度;
·導通電阻Rds (on):<30mΩ,降低導通損耗與發(fā)熱;
·封裝:DFN5*6/TO-252,適配關(guān)節(jié)緊湊空間,同時具備優(yōu)異散熱性能;

雷卯電子推出專為機器人關(guān)節(jié)驅(qū)動優(yōu)化的N+P 合封 MOSFET,在集成度、一致性與可靠性方面具備顯著優(yōu)勢,部分型號參數(shù)及應用推薦如下:
型號 | NMOS參數(shù) | PMOS參數(shù) | 綜合評價 | 推薦應用 |
LM3D40NP02 | 20V,40A, Rds(on)=5.3 mΩ | -20V,30A, Rds(on)=10.5 mΩ | 高性價比 -低導通損耗(尤其NMOS) -支持中高電流輸出 -封裝緊湊,PDFN3x3 | 中等功率關(guān)節(jié)(如前臂、手腕) |
| LM4606 | 20V, 7A, Rds(on)=13 mΩ | -20V, -6A, Rds(on)=30mΩ | 小型化低功耗代表作 -小電流下保持良好導通特性 - 封裝SOP-8 | 微型伺服、傳感關(guān)節(jié)、消費級機器人部件 |
| LMAK68NP04 | 40V, 68A, Rds(on)=4.5mΩ | -40V, -47A, Rds(on)=12mΩ | 高壓大電流主力型: -功率密度高,適合大扭矩關(guān)節(jié) - 封裝TO-252-4 | 大功率關(guān)節(jié)(如腰部、大腿、髖部) 需承受沖擊負載或再生制動場景 |
2、MOSFET 柵極 ESD 與浪涌防護
·柵源極并聯(lián)TVS 二極管:選型SMBJ18CA,雙向TVS,鉗位電壓低于MOSFET柵極30V的最大耐受電壓,直接泄放柵極靜電浪涌,避免柵氧層擊穿。
·布局要求:柵極驅(qū)動走線長度<5mm,TVS器件緊貼MOSFET柵源引腳放置,最小化寄生電感。

(三)傳感器與信號接口防護電路
頸部關(guān)節(jié)的編碼器、IMU、力矩傳感器屬于mV級弱信號器件,ESD防護的核心矛盾是防護性能與信號完整性的平衡,需采用超低容值防護器件,避免信號畸變。

1.SPI接口靜電防護
雷卯電子推薦選用2通道ESD陣列SMC12,其單通道結(jié)電容<50pF,支持 IEC 61000-4-2 ±15kV空氣放電、±8kV 接觸放電,可在提供ESD防護的同時,不影響信號的邊沿與完整性。
2. IMU與力矩傳感器防護
·電源防護:傳感器3.3V/5V電源輸入端,并聯(lián)SD03CW/SD05C
ESD二極管,實現(xiàn)電源軌的ESD與浪涌防護。
·屏蔽設計:傳感器線纜采用屏蔽雙絞線,屏蔽層單端接地(主控制器端),避免地環(huán)路引入的ESD干擾。
(四)通信總線接口防護電路
頸部關(guān)節(jié)與主控制器的通信以CAN FD總線為主,具體防護設計如下:

器件選型:雷卯推薦集成式CAN-FD總線防護器件SMC24LV/SMC27LVQ,結(jié)電容<5PF,可以保證信號完整性的同時,可濾除雜訊、通過靜電測試, 將該器件并聯(lián)于 CAN_H-GND、CAN_L-GND,可實現(xiàn) IEC 61000-4-2 ±15kV 空氣放電、±8kV 接觸放電的ESD防護效果。
干擾抑制:選型LDW43T-513T共模扼流圈,抑制總線共模干擾,提升通信穩(wěn)定性。
四
PCB 布局與工程實現(xiàn)關(guān)鍵要點
1、遵循防護路徑最短原則:所有ESD浪涌防護器件必須緊貼接口放置,泄放路徑長度<3mm,避免過長走線的寄生電感降低防護效果。
2、實施強弱電分區(qū)隔離:功率驅(qū)動區(qū)(強電)與控制傳感區(qū)(弱電)嚴格分區(qū),采用單點接地方式,避免功率地的浪涌電流串入控制地,導致MCU死機、傳感器數(shù)據(jù)異常。
3、優(yōu)化結(jié)構(gòu)屏蔽設計:關(guān)節(jié)金屬外殼與系統(tǒng)地可靠連接,形成法拉第籠,屏蔽空間輻射ESD干擾;外殼縫隙、出線口做密封處理,避免靜電直接侵入內(nèi)部電路。
五
核心器件選型清單
器件型號 | 核心參數(shù) | 封裝 | 防護位置 |
SMBJ58CA | 58V,600W雙向,6.4A | SMB | 48V 一級電源防護 |
SMAJ58CA | 58V,400W雙向,4.3A | SMA | |
SMF58CA | 58V,200W雙向,2A | SOD-123 | |
SMBJ15CA | 15V,600W,雙向,24.6A | SMB | 12V二級電源防護 |
SMF58CA | 15V,200W,雙向,8.2A | SOD-123 | |
SMBJ18CA | 18V,600W,雙向,20.6A | SMB | MOSFET柵極防護 |
SMC12 | 12V,雙向,35pF | SOT-23 | SPI靜電防護 |
SMC24LV | 24V,雙向,5pF | SOT-23 | CAN-FD總線靜電防護 |
SD05C | 5V,雙向 | SOD-323 | 5V傳感器電源防護 |
ESDA33CP30 | 3.3V雙向 | DFN1006 | 3.3V電源防護 |
上海雷卯電子始終認為,高性能的組件選型與嚴謹?shù)腜CB 布局是 EMC 設計的兩大核心支柱,二者缺一不可。只有將組件參數(shù)深度對齊系統(tǒng)耐壓限制,并輔以極致的 Layout 工藝,才能在日益復雜的電磁環(huán)境中確保產(chǎn)品的生存力。未來,上海雷卯電子也將憑借 20 余年的技術(shù)積累,持續(xù)為人形機器人行業(yè)提供定制化的EMC電路保護解決方案與技術(shù)支持。
-
ESD
+關(guān)注
關(guān)注
50文章
2419瀏覽量
180271 -
靜電
+關(guān)注
關(guān)注
2文章
563瀏覽量
38367 -
機器人
+關(guān)注
關(guān)注
213文章
31320瀏覽量
223397
發(fā)布評論請先 登錄
伺服電動缸在人形機器人中的應用
關(guān)節(jié)機器人控制
人形機器人的關(guān)節(jié)技術(shù)能不能使用球形關(guān)節(jié)?
為什么人形機器人更討人喜歡?
工業(yè)機器人的產(chǎn)業(yè)鏈
工業(yè)機器人的末端關(guān)節(jié)旋轉(zhuǎn)該精確控制?
機器人關(guān)節(jié)用什么電機?
【教程1】人形街舞機器人-套件檢測教程
劍指人形機器人賽道,泰科機器人推出重磅關(guān)節(jié)模組

專為人形機器人應用打造,助力具身智能行業(yè)發(fā)展,泰科機器人關(guān)節(jié)模組持續(xù)升級!

泰科機器人獲獎,開啟人形機器人關(guān)節(jié)模組新動力

中科本原推出面向人形機器人的關(guān)節(jié)電機解決方案
人形機器人關(guān)節(jié)模組關(guān)鍵技術(shù)解析,及產(chǎn)業(yè)鏈上游電機/傳感器企業(yè)一覽




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論