") 簡析當下無人機激光雷達行業(yè)的技術瓶頸
簡析當下無人機激光雷達行業(yè)的技術瓶頸

目前無人機激光雷達的核心瓶頸集中在性能、功耗、成本、環(huán)境適應性、數(shù)據(jù)處理與集成五大方面,簡單總結(jié)如下:
一、硬件性能與可靠性瓶頸
1.機械結(jié)構(gòu)vs固態(tài)化:機械旋轉(zhuǎn)式(主流)體積大、重量重、功耗高、易磨損、壽命短;純固態(tài)(OPA/Flash)分辨率、視場、探測距離不足,難以兼顧高幀率與遠距離。
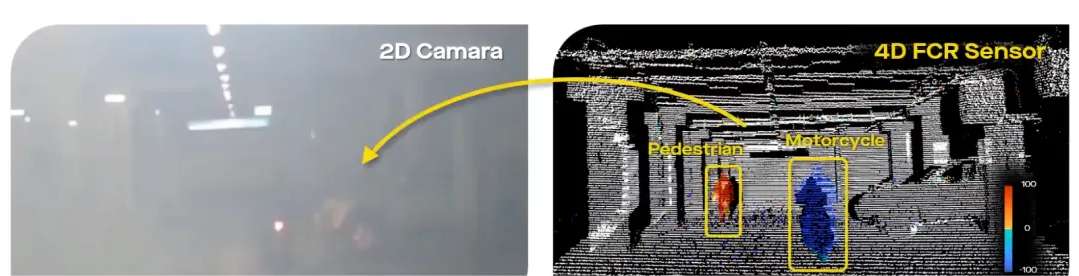
2.探測距離與抗干擾:雨、霧、粉塵、強光下信號衰減嚴重、點云丟失;905nm穿透力弱、1550nm成本與功耗高。
3.溫漂與振動:高空/地面溫差大導致波長漂移、熱透鏡效應;無人機振動/沖擊易造成光軸偏移、精度下降。
4.輕量化與載荷矛盾:無人機載荷有限,要求重量<200g、功耗<10W,但高性能與適航認證常需犧牲輕量化。
二、成本與供應鏈瓶頸
1.核心器件依賴進口:高端激光器、SPAD、硅光芯片國產(chǎn)化率低、價格高,制約規(guī)模化與性價比。
2.量產(chǎn)與良品率:固態(tài)/OPA/FMCW路線工藝復雜、良品率低、成本難下探,難以普及。
三、數(shù)據(jù)與算法瓶頸
1.點云數(shù)據(jù)爆炸:高密度點云數(shù)據(jù)量大、傳輸/存儲/處理壓力大,機載算力與實時性受限。
2.多傳感器融合:與GPS/IMU/視覺時空對齊難、延遲高,影響定位與避障可靠性。
3.環(huán)境理解不足:復雜場景(如樹林、建筑、動態(tài)目標)點云分割、識別、跟蹤精度不足。
四、集成與應用瓶頸
1.適航認證復雜:振動、EMC、功能安全等認證周期長、成本高。
2.標定與維護:外參標定流程繁瑣、環(huán)境適應性差,長期使用易漂移。
總結(jié):無人機激光雷達當前最大矛盾是 “高性能、小體積、低功耗、低成本” 難以同時滿足,加上惡劣環(huán)境適應性與數(shù)據(jù)實時處理的雙重壓力。
抒微智能自主研發(fā)的朱雀VB10A,VB22A,VB50A系列,白虎WT100A-WT200A-WT300A-WT600A-WT1500A系列激光雷達模組,廣泛應用于無人機定高,無人機避障等場景,最小體積可達12 x 7.5 x 9.1mm,最小重量僅1g,最大精度±10mm,最大定制量程達1500m,與國內(nèi)外多家知名無人機廠商深度合作,抒微surertech激光雷達傳感器以檢測精度高,體積小巧易集成,抗環(huán)境干擾能力強,價格適中等諸多優(yōu)勢受到客戶們的喜愛!
南京抒微智能科技有限公司,致力于高性價比光電傳感器技術開發(fā)及其應用解決方案產(chǎn)業(yè)化!
-
無人機
+關注
關注
236文章
11346瀏覽量
196251 -
激光雷達
+關注
關注
981文章
4511瀏覽量
196792
發(fā)布評論請先 登錄
激光雷達-無人駕駛汽車的必爭之地
成熟的無人駕駛方案離不開激光雷達
消費級激光雷達的起航
固態(tài)設計激光雷達
TOF激光雷達
【北醒TFmini-S 測距/避障激光雷達傳感器免費試用連載】(競賽類)室內(nèi)無gps無人機的精準定位
反無人機技術的研發(fā),無人機反制設備成為熱門產(chǎn)品
無人機搭載激光雷達的效率
無人機激光雷達傳感器技術
最新型的多旋翼激光雷達和紅外無人機實現(xiàn)配網(wǎng)首航
當激光雷達邂逅無人機...
基于激光雷達傳感器無人機避障問題研究
激光雷達在無人機中的應用實例
激光雷達技術或可助力防御無人機
海外首款由激光雷達驅(qū)動的無人機發(fā)布



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論