") 機電作動器(EMA)核心結構體系解構:電機、減速器、絲杠與控制器的耦合機制
機電作動器(EMA)核心結構體系解構:電機、減速器、絲杠與控制器的耦合機制


在高端裝備制造領域,作動系統(tǒng)的技術演進始終與能源形式的變革緊密相連。近年來,隨著集成化控制組件研究的不斷深入,機電作動器正以前所未有的速度拓展其應用版圖,從最初航空領域的嘗試性應用,逐步延伸至導彈飛控、艦艇操舵、深海潛水器姿態(tài)控制等多元化場景。這一技術遷移的背后,折射出裝備制造業(yè)對作動系統(tǒng)“小體積、高性能、高可靠性、大扭矩輸出”等技術特征的迫切需求。
大型潛水器的操縱運動控制主要通過車舵配合實現(xiàn),即在特定螺旋槳推進轉(zhuǎn)速下,利用升降舵與方向舵的聯(lián)合作用完成空間姿態(tài)調(diào)整與運動控制。在這一應用場景中,傳統(tǒng)復式液壓作動器長期占據(jù)主導地位,但其固有的振動沖擊傳導、維護成本高昂、液壓油污染風險等問題始終困擾著裝備設計人員。機電作動器的出現(xiàn),從根本上規(guī)避了上述弊端,其高集成度、優(yōu)秀可靠性、理想操舵精度等優(yōu)勢,為艦艇能源形式精簡化與清潔化、潛水器操縱運動精細化控制與減震降噪、操舵裝置作動器小型化與舷外布置等現(xiàn)實需求提供了堅實的技術基礎。
湖南泰德航空技術有限公司長期專注于高端作動系統(tǒng)的技術研發(fā)與工程應用,在機電作動器技術領域積累了豐富經(jīng)驗。本文將從產(chǎn)業(yè)技術視角出發(fā),對舵用機電作動器技術的發(fā)展脈絡、核心結構、應用挑戰(zhàn)及未來方向進行系統(tǒng)性梳理,以期為相關領域的技術研究和工程實踐提供參考。
一、機電作動器技術的發(fā)展脈絡與應用演進
1.1 功率電傳概念的源起與演變
20世紀70年代末,航空領域面臨著一場深刻的能源革命。傳統(tǒng)飛機依賴復雜的液壓、氣壓和機械系統(tǒng)實現(xiàn)各項功能,這些系統(tǒng)不僅重量大、維護復雜,而且能量轉(zhuǎn)換效率低下。為了突破這一技術瓶頸,研究人員提出了“功率電傳”這一顛覆性概念,其核心思想是用電力系統(tǒng)全面取代傳統(tǒng)飛機上的液壓、氣壓和機械系統(tǒng)。與之對應的功率電傳作動器僅依靠電能即可完成供能裝置到執(zhí)行裝置的功率輸送,因此也被稱為電力作動器。
這一概念的提出并非偶然。同期永磁材料技術的突破和電力電氣設備的快速發(fā)展,為全電動飛機概念的誕生提供了技術土壤。全電動飛機通過將驅(qū)動系統(tǒng)從傳統(tǒng)的液壓作動替換為EMA,實現(xiàn)了操縱系統(tǒng)重量的顯著減輕、整機可維護性的全面提升,并為更高精度的飛行控制提供了可能。到20世紀80年代,美國空軍、海軍和NASA相繼認可了全電飛機的技術路線,這一認可標志著航空作動系統(tǒng)從液壓能源向電能驅(qū)動的根本性轉(zhuǎn)變正式進入快車道。

1.2 兩種技術路線的并存與分野
在功率電傳作動系統(tǒng)的發(fā)展進程中,逐漸形成了機電作動器和電動靜液作動器兩種技術路線。這兩種方案雖然都以電能為主要能源形式,但在技術路徑和結構特征上存在顯著差異。
電動靜液作動器采用了一種折中的技術方案。在EHA系統(tǒng)中,控制器發(fā)出驅(qū)動控制信號,控制伺服電機正反向旋轉(zhuǎn),帶動液壓泵正反轉(zhuǎn)工作,推拉舵桿、舵柄,使舵葉轉(zhuǎn)動。這種方案雖然保留了液壓元件,但取消了傳統(tǒng)液壓系統(tǒng)中復雜的管路網(wǎng)絡,實現(xiàn)了功率電傳與液壓驅(qū)動的有機結合,在一定程度上兼顧了電氣化的優(yōu)勢和液壓技術的高功率密度特點。
相比之下,機電作動器采取了更為徹底的電氣化方案。EMA控制器受指令控制產(chǎn)生可以調(diào)節(jié)電動機轉(zhuǎn)速的相電流,使電機輸出目標轉(zhuǎn)速,再經(jīng)減速器和滾柱絲杠將回轉(zhuǎn)運動轉(zhuǎn)化為往復運動位移輸出。與傳統(tǒng)復式液壓作動相比,EMA和EHA在可靠性、維護成本等方面均具備不同程度的優(yōu)勢。而從技術演進的角度審視,EMA在潛水器舵用作動方向上占據(jù)更大的技術優(yōu)勢,這主要歸功于EMA整體電氣化的結構設計帶來的系統(tǒng)簡化、重量減輕和可靠性提升。
1.3 從航空驗證到水下拓展的應用歷程
機電作動器在商業(yè)航空領域的發(fā)展歷程,堪稱技術從驗證走向成熟的經(jīng)典案例。空客公司于20世紀80年代末率先在A320客機上引入EMA參與飛行控制,這一嘗試在當時具有開創(chuàng)性意義。緊隨其后,1994年波音B777也引入了該裝置。實踐證明,EMA的應用大大減輕了控制硬件的重量,并為其他飛機部件提供了額外的布置空間,這一優(yōu)勢在寸土寸金的飛機內(nèi)部空間中顯得尤為珍貴。
美國Lockheed Martin公司主導開發(fā)的聯(lián)合打擊戰(zhàn)斗機F-35,在起落架上使用了Moog公司開發(fā)的EMA。在艦載型F-35上,機翼折疊結構同樣采用EMA完成機翼折疊,不再需要布置復雜且冗余的管路即可實現(xiàn)機翼的收放。這一應用充分展示了EMA在復雜功能實現(xiàn)中的靈活性和可靠性。
2011年,Safran公司開發(fā)和生產(chǎn)的機電執(zhí)行器首次載機飛行,執(zhí)行副翼的主要飛行控制功能,累計載機飛行時長達114小時。基于實驗數(shù)據(jù),Safran公司提出了全面應用EMA的“智能機翼”項目,聚焦于解決EMA滾柱絲杠卡阻與熱負荷嚴重的問題,以確保EMA更徹底地實現(xiàn)安全關鍵應用。2013年下線的波音787客機配備了由EMA驅(qū)動的發(fā)動機啟動裝置、第二飛控、起落架收放裝置和剎車系統(tǒng),這使得波音787控制系統(tǒng)集成度得到顯著提高,較波音777電路卡數(shù)量由169個降至53個,15個飛控組件被集成至4個FCE設備架上,大大降低了機內(nèi)空間占用。
航空領域的成功應用,為EMA向海洋裝備領域拓展提供了寶貴的經(jīng)驗積累和技術驗證。2016年,英國亨廷頓英格爾斯工業(yè)公司與波音公司合作研制的大型UUV“回聲航行者”正式下線,其采用混合式可充電的電力系統(tǒng),為推進系統(tǒng)和艦舵提供動力。美國建造中的“哥倫比亞”級核潛艇采用綜合電力設計,使用全電力推進及配套的操縱運動控制系統(tǒng),極大地增加了潛艇的靜謐性。這些標志性成果表明,全電力化的概念正在各領域獲得廣泛認可,而EMA因其更大的開發(fā)帶寬、更低的維護成本、更小的重量尺寸而逐漸在航空、船舶等行業(yè)的精密控制領域和特種裝備上獲得應用。

二、機電作動器核心結構體系與關鍵技術分析
2.1 系統(tǒng)構成與工作原理
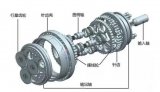
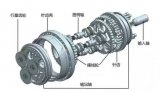
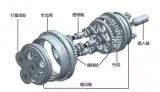
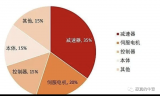
機電作動器的技術優(yōu)勢源于其精巧的機電一體化結構設計。從系統(tǒng)構成來看,一套完整的EMA通常包含電機、減速機構、絲杠機構、控制器以及各類傳感器五大核心部件。這些組件之間緊密耦合、協(xié)同工作,共同實現(xiàn)精確的位置、速度和力控制。
其工作原理可概括為:控制器接收指令信號后,產(chǎn)生可調(diào)節(jié)電機轉(zhuǎn)速的相電流,驅(qū)動伺服電機輸出目標轉(zhuǎn)速;電機輸出的高速旋轉(zhuǎn)運動經(jīng)減速機構轉(zhuǎn)換為低速高扭矩回轉(zhuǎn);絲杠機構進一步將回轉(zhuǎn)運動轉(zhuǎn)化為直線往復運動或擺動,最終驅(qū)動外部負載。整個過程中,傳感器實時監(jiān)測位置、速度和負載信息,并將數(shù)據(jù)反饋給控制器,形成閉環(huán)控制。
與傳統(tǒng)液壓作動器相比,EMA取消了液壓油、油泵、油管、閥門等復雜液壓元件,系統(tǒng)結構大幅簡化,能量轉(zhuǎn)換效率顯著提升。同時,電氣化設備具備更強的自我故障診斷能力,維護成本更低,無液壓油泄漏風險,環(huán)境友好性更高。
2.2 電機:能量轉(zhuǎn)換的核心單元
EMA內(nèi)置的變速伺服電機負責將電能轉(zhuǎn)換為機械能,其性能直接決定了EMA的整體輸出特性和動態(tài)響應能力。對于舵用EMA而言,電機需要具備結構緊湊、可靠性高、功率密度大、散熱良好等技術特征。
在實際應用中,常用伺服電機類型包括永磁同步電機、無刷直流電機和開關磁阻電機三種。永磁同步電機采用永磁體勵磁,無需勵磁繞組,消除了勵磁損耗,效率可達90%以上,具有功率密度高、效率高、轉(zhuǎn)矩脈動小等優(yōu)點,適用于高性能伺服驅(qū)動場合。無刷直流電機結構簡單、維護方便、控制相對簡單,在中小功率EMA中應用廣泛。開關磁阻電機具有結構堅固、成本低、適應惡劣環(huán)境等優(yōu)點,但其轉(zhuǎn)矩脈動較大,控制相對復雜。
在潛水器舵用EMA的選型中,需要綜合考慮電制、功率等級、工作環(huán)境等因素。特別是水下高壓環(huán)境對電機的耐壓性能提出了特殊要求,而深海低溫條件則考驗電機的低溫啟動和運行能力。此外,電機的散熱問題也是舵用EMA設計中的關鍵考量,繞組銅損作為主要發(fā)熱源,其發(fā)熱量與電機負載扭矩呈正相關,在長時間高負荷工況下,電機內(nèi)部溫度過高將影響磁鐵磁性,導致永磁電機扭矩性能下降。

2.3 減速機構:扭矩匹配的關鍵環(huán)節(jié)
減速機構的作用是將伺服電機的高速低扭矩輸出轉(zhuǎn)換為螺桿機構所需的低速高扭矩輸入。這一轉(zhuǎn)換對于舵用EMA至關重要,因為操舵動作需要較大的驅(qū)動力矩,而電機直接輸出難以滿足這一需求。
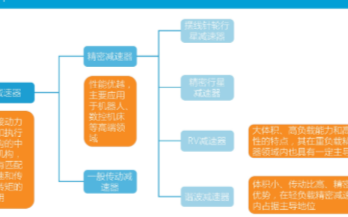
EMA中常見減速機構包括諧波齒輪減速器、擺線減速器和行星齒輪減速器三種類型。諧波齒輪減速器基于柔性齒輪的彈性變形原理,通過波發(fā)生器使柔輪產(chǎn)生周期性變形,與剛輪嚙合實現(xiàn)減速傳動,具有體積小、傳動比大、回差小、傳動精度高等優(yōu)點。擺線減速器采用擺線針輪嚙合原理,具有承載能力高、傳動平穩(wěn)、壽命長等特點。行星齒輪減速器結構緊湊、傳動效率高、承載能力強,是EMA中應用最廣泛的減速機構之一。
對于舵用EMA,減速機構的選擇需要綜合考慮傳動效率、承載能力、回差、體積重量和維護性等因素。現(xiàn)代EMA設計趨向于采用高精度減速器,以實現(xiàn)更加緊湊的結構、零間隙和更高的傳遞效率。特別是在空間受限的潛水器艙內(nèi),減速機構的小型化和輕量化設計顯得尤為重要。
2.4 絲杠機構:運動轉(zhuǎn)換的精密部件
絲杠機構是EMA中將旋轉(zhuǎn)運動轉(zhuǎn)換為線性運動的關鍵部件,同時也是連接伺服電機和外部負載、匹配扭矩和速度的過渡機構。在舵用EMA中,絲杠機構承擔著將電機扭矩轉(zhuǎn)化為舵葉驅(qū)動力矩的重要任務,其性能和可靠性直接影響整個系統(tǒng)的操舵精度和安全性。
EMA中常用的絲杠機構包括滾珠絲杠和行星滾柱絲杠兩種。滾珠絲杠通過鋼球在絲杠與螺母之間滾動實現(xiàn)滾動摩擦傳動,具有傳動效率高、運動精度好、正反轉(zhuǎn)無間隙等優(yōu)點。行星滾柱絲杠則采用多個滾柱作為滾動體,絲杠與螺母之間的接觸點更多,承載能力更高。對于給定的負載,行星滾柱絲杠機構的導程比滾珠絲杠機構低,但負載能力更高,適用于大負載、長壽命應用場合。
在艦艇維持航向、深海潛水器處于水下潛浮、定深航行等工況下,操舵裝置需要頻繁動作以實現(xiàn)艇體按預定航向及潛深航行,這對絲杠機構的性能、疲勞壽命和可靠性提出了較高要求。絲杠機構的失效模式主要包括疲勞點蝕、磨損、潤滑失效、過載斷裂等,其中疲勞點蝕是最常見的失效形式,在交變接觸應力作用下,接觸表面產(chǎn)生微小裂紋,逐漸擴展形成點蝕坑,最終導致精度下降和噪聲增大。
2.5 控制器:系統(tǒng)運行的智能中樞
控制器是EMA的“大腦”,負責接收指令信號、處理傳感器反饋、計算控制量并驅(qū)動電機運行。傳感器將位置、速度和負載信息發(fā)送到控制器,以進行位置反饋和電流調(diào)整。現(xiàn)代EMA控制器通常采用數(shù)字信號處理器或微控制器作為核心運算單元,實現(xiàn)高精度的閉環(huán)控制算法。
EMA控制器的關鍵技術包括電流環(huán)控制、速度環(huán)控制、位置環(huán)控制以及各類高級控制算法。空間矢量脈寬調(diào)制技術是其中的代表性成果,它將逆變器與電機視為一個整體,利用逆變器功率開關管的開關狀態(tài)和順序組合,使空間電壓矢量沿基準圓運行產(chǎn)生SVPWM波。與傳統(tǒng)SPWM調(diào)制方式相比,功率開關管的開關次數(shù)可降低30%,并能實現(xiàn)較強的諧波抑制效果,從而提高舵用EMA調(diào)速便利性,降低EMA轉(zhuǎn)矩脈動,減少滾柱絲杠及減速機構的振動與發(fā)熱。
對于潛水器舵用EMA,控制器還需要具備環(huán)境適應性設計,能夠在水下高壓、低溫環(huán)境下穩(wěn)定工作。控制器的可靠性直接關系到EMA的整體可靠性,因此冗余設計、故障診斷和容錯控制技術也是控制器設計的重要內(nèi)容。此外,隨著智能控制技術的發(fā)展,先進控制算法正逐步應用于EMA控制系統(tǒng),以應對非線性、時變等復雜特性,提高系統(tǒng)的抗干擾能力和跟蹤精度。

三、舵用機電作動器應用現(xiàn)狀與工程挑戰(zhàn)
3.1 滾柱絲杠失效機理與冗余設計
滾柱絲杠在EMA采用操舵的過程中承擔著將伺服電機經(jīng)齒輪組傳遞的回轉(zhuǎn)運動轉(zhuǎn)換為往復運動的重任。在艦艇維持航向、深海潛水器處于水下潛浮、定深航行等工況下,操舵裝置需要頻繁動作,這對滾柱絲杠的性能提出了較高要求。
對于標準滾珠絲杠,失效通常發(fā)生在絲杠、滾柱和螺母三大部件嚙合螺紋的接觸面上。在諸多失效形式中,裝配未對中導致失效、沖擊載荷引發(fā)失效、接觸面磨損導致失效等形式具備不可預測性,影響了EMA在高可靠性需求場景中的應用。從失效機理深入分析,滾柱絲杠失效的主要原因可歸納為疲勞點蝕、磨損、潤滑失效和過載斷裂四類。
疲勞點蝕是最常見的失效形式,在交變接觸應力作用下,接觸表面產(chǎn)生微小裂紋,逐漸擴展形成點蝕坑,最終導致精度下降和噪聲增大。磨損失效則與潤滑狀態(tài)、載荷大小、運動速度等因素密切相關,潤滑劑失效或污染會加速磨損進程。過載斷裂通常發(fā)生在極端工況下,如舵葉受到劇烈沖擊時,絲杠可能因承受超過設計極限的載荷而斷裂。
解決滾柱絲杠失效問題的主要方法為增加故障冗余能力。從系統(tǒng)設計層面,可采取雙余度甚至多余度設計,即在關鍵傳動環(huán)節(jié)設置冗余路徑,當一路發(fā)生故障時,另一路能夠接替工作。航天科技十八所提出的雙余度機電伺服系統(tǒng),可以保證傳動機構、伺服電機以及控制驅(qū)動器出現(xiàn)故障時依然能正常工作,并通過了仿真驗證。從機械結構層面,德國斯圖加特大學提出了一種斷開裝置,以實現(xiàn)滾柱絲杠卡死情況下避免對減速器和伺服電機造成進一步的破壞。此外,采用先進的材料和熱處理工藝提高表面硬度和耐磨性,加強潤滑管理確保接觸面形成良好的油膜,也是提升滾柱絲杠可靠性的有效手段。
3.2 瞬時高過載耐受能力與鎖止機構設計
應用于操舵裝置的EMA在艦艇水面航渡工況下,會面臨海浪抨擊舵葉表面產(chǎn)生瞬時大載荷。當艦艇頂浪航行時,若船長小于航渡海域涌浪波長,將誘發(fā)縱搖,破壞船舶穩(wěn)性;當艦艇干舷長度與涌浪波長相近時,將誘使艦艇存在發(fā)生中拱或中垂的風險。上述兩種情況都將考驗EMA應對瞬時過載的能力。如果搭載EMA的艦艇與海洋裝備有在冰區(qū)航行、浮潛的需求時,對其操舵裝置所搭載EMA的抗載荷能力提出更高的需求。
瞬時高過載對EMA的危害主要體現(xiàn)在三個方面:過大的沖擊載荷可能導致齒輪斷齒、絲杠彎曲或斷裂、軸承壓潰等機械損壞;沖擊載荷可能使控制系統(tǒng)的位置/力反饋出現(xiàn)突變,引起控制失穩(wěn);反復的沖擊載荷會加速接觸疲勞,降低部件壽命。這些危害對于要求高可靠性的水下裝備而言,都是不可接受的。
為了提高EMA應對瞬時高過載能力,通常在其中加入鎖止機構,通過避免伺服電機、減速裝置和滾柱絲杠直接承擔載荷,提高瞬時高過載能力。鎖止機構可以是機械式或電磁式,在正常工作時脫開,在檢測到?jīng)_擊載荷時迅速鎖止,將載荷傳遞到殼體。中國科學院沈陽自動化研究所提出的一種使用蝸輪、蝸桿傳動實現(xiàn)反行程自鎖,具備機械自鎖能力的深海自主水下機器人自鎖式舵機,為這一問題的解決提供了有益參考。
從更廣闊的技術視角看,應對瞬時高過載還需要從多個層面綜合施策:采用柔性傳動元件吸收沖擊能量;增加緩沖裝置延長沖擊作用時間;優(yōu)化控制算法,在檢測到?jīng)_擊時迅速調(diào)整控制策略;加強結構設計,提高關鍵部件的抗沖擊能力。這些措施相互配合,共同構筑EMA的抗過載能力體系。
3.3 熱堆積機理與熱管理技術
EMA中驅(qū)動控制器的IGBT模塊、伺服電機的繞組、滾柱絲杠的嚙合接觸面等,在未及時散熱的情況下,均會造成熱堆積。在航空業(yè),配備EMA的機翼作動器通常需要配置專門的散熱裝置,以避免由于熱堆積所導致的EMA故障。這一問題的嚴重性在水下應用中更為突出,因為海水雖然可以作為散熱介質(zhì),但舷內(nèi)布置的EMA難以利用這一優(yōu)勢。
IGBT作為電力電子裝置中的重要組成部分,其主要功能是將控制信號進行隔離和放大。在船用EMA執(zhí)行操舵等作動指令時,IGBT功率模塊長時間的運行和頻繁起動、關閉過程中會導致其產(chǎn)生大量的熱。IGBT的結溫過高會降低器件可靠性,嚴重時可能導致熱擊穿失效。電子工業(yè)領域正在積極探索使用碳化硅陶瓷等新型材料對IGBT進行封裝,以實現(xiàn)更好的散熱性能。同時,優(yōu)化IGBT的開關頻率、改善驅(qū)動電路設計,也有助于降低其發(fā)熱量。
在伺服電機中,繞組銅損是主要發(fā)熱源,其發(fā)熱與電機負載扭矩呈正相關。船用EMA在面臨較長時間高負荷使用時,其伺服電機內(nèi)部溫度過高會影響磁鐵磁性,進而使得永磁電機扭矩性能降低。電機常見的散熱方式包括自然散熱與強制散熱,強制散熱又可分為風冷和液冷兩種。通常在伺服電機的設計中,就配置溫度傳感器與溫度控制器,實現(xiàn)對風冷或液冷的閉環(huán)控制。對于水下應用的EMA,利用海水進行冷卻具有天然優(yōu)勢,但這對密封設計和材料選擇提出了更高要求。
滾柱絲杠的熱源主要為軸承摩擦發(fā)熱以及絲杠、滾柱與螺母之間的摩擦生熱。絲杠的溫升會造成其發(fā)生熱變形,影響嚙合精度,這將致使EMA執(zhí)行作動指令的精度隨之下降;高溫也會使?jié)L柱絲杠內(nèi)潤滑劑潤滑效果下降,進一步加劇摩擦磨損。滾柱絲杠的熱管理需要從材料選擇、潤滑設計、結構優(yōu)化等多個方面著手,包括選用熱膨脹系數(shù)匹配的材料、優(yōu)化潤滑劑配方、設計合理的散熱通道等。
對于舵用EMA,熱管理是一個需要綜合考慮的系統(tǒng)工程問題。舷外布置方案之所以受到關注,正是因為它能夠借助海水直接冷卻,有效解決熱堆積問題。但同時,舷外布置又帶來了密封、耐壓等一系列新的技術挑戰(zhàn)。
3.4 舷外布置的關鍵技術難題
舵機舷內(nèi)布置所導致的舵桿往復運動密封難度高、舷內(nèi)舵機承受背壓增加操舵功耗等問題,始終困擾著水下裝備尤其是大潛深潛水器設計人員。功率電傳、集成度高、體積小的EMA的出現(xiàn),為操舵裝置的舷外布置提供了技術基礎。憑借EMA的應用,電動操舵裝置的舷外布置規(guī)避了水下裝備耐壓殼體上實現(xiàn)往復運動密封的技術難題,同時借助舷外布置使結構直接接觸海水,解決了EMA熱效率差、產(chǎn)生熱量堆積、誘發(fā)性能退化等問題。
舷外布置并非簡單的安裝位置遷移,它帶來了一系列需要重新解決的技術難題。首先是活塞桿密封問題。舷外布置意味著EMA整體必須進行耐壓設計,在動作機構的密封上,需要避免傳統(tǒng)密封方式因長時間運動存在磨損、變形等引起高水壓環(huán)境下密封失效的問題。當前,活塞桿的密封方式通常包括漲圈密封、密封圈密封和迷宮密封。漲圈密封與迷宮式密封的原理均為借助液體介質(zhì)實現(xiàn)密封,從潛水器舷外舵機的使用場景出發(fā),EMA活塞桿處密封應采取耐磨損、泄露量小的密封圈密封。
采取密封圈式密封實現(xiàn)舷外舵機EMA的防泄漏,對密封處導向環(huán)與密封圈性能提出了更高要求。導向環(huán)用于承受徑向載荷,防止活塞桿與缸體直接接觸,保護密封圈。密封圈則需要在高水壓下保持良好的彈性和密封性能。某研究所設計的一款舷外浸水收放機構,其作動器活塞桿的密封結構包含了4道環(huán)形槽,并由內(nèi)至外設置了防塵圈、佐康雷姆封、耐磨環(huán)、特康斯特封。特康與佐康材料具備摩擦小、無爬行結構、穩(wěn)定性好、耐磨性滿足工作條件要求、彈性好、安裝方便等特點,為高水壓環(huán)境下往復運動密封提供了可靠解決方案。
其次是整體機構耐壓問題。水下裝備通常借助壓力補償裝置,使內(nèi)部補償壓力始終高于海水壓力1至2巴,以提高其耐壓性能。壓力補償?shù)幕驹硎窃诿芊鈿んw內(nèi)部充入液體或氣體,并通過彈性元件或活塞與外部海水壓力平衡,使殼體內(nèi)外壓差維持在較低水平。哈爾濱工程大學設計的一款水下電動設備,通過內(nèi)腔整體充油并設置壓力補償器,在確保設備耐壓性能的同時,提高了電機散熱性能與絕緣性能。充油式結構使電機繞組直接與絕緣油接觸,散熱效果優(yōu)于空氣冷卻,同時油液作為壓力傳遞介質(zhì),使電機內(nèi)外壓力平衡,降低了殼體結構強度要求。中海油研究總院所設計的一款三自由度水下攝像照明系統(tǒng)中,使用壓力補償器對系統(tǒng)中提供動力的舵機電機艙進行壓力補償,實現(xiàn)了內(nèi)外壓平衡、提高密封性能、防止海水深入等功能。
對于舵用EMA的舷外布置,整體機構的耐壓設計需要考慮電機、控制器、減速器、絲杠等所有部件的耐壓能力。高壓環(huán)境對電子元器件的封裝、電機繞組的絕緣、軸承的潤滑等都提出了特殊要求。采用壓力補償與耐壓殼體相結合的設計方案,是當前潛水器EMA舷外布置的主流技術路線。
3.5 高可靠性控制技術
潛水器舵用EMA工作環(huán)境較為復雜,通常承受著局部高溫、瞬時過載沖擊等不良影響,易引起伺服電機發(fā)生電機匝間短路、頻繁換向引起的電機過熱、電暈腐蝕等故障。滾柱絲杠也存在著如絲杠間隙引起共振、瞬時過載沖擊造成損傷以及絲杠卡組等故障的風險。因此對其采取科學、合理、有效的控制技術至關重要。
健康管理技術是提升EMA可靠性的重要手段。健康管理技術包括形成EMA狀態(tài)監(jiān)測方法、構建關鍵部件失效機理和退化模型、做出剩余壽命預測、給出維護決策,將顯著提高舵用EMA在惡劣工況下的可靠性。健康管理系統(tǒng)的核心是建立準確的故障診斷和壽命預測模型,這需要深入理解EMA各關鍵部件的失效機理,識別能夠反映健康狀態(tài)的特征參數(shù),通過大量實驗數(shù)據(jù)驗證模型的準確性。德國航空航天中心與利勃海爾航空有限公司聯(lián)合對EMA健康檢測展開研究,通過建立仿真模型、模擬實際動作、積累大量測試數(shù)據(jù),其提出的健康檢測算法可以對EMA減速器、軸承等故障進行有效預測。對于舵用EMA,健康管理系統(tǒng)需要監(jiān)測的關鍵參數(shù)包括電機電流、溫度、振動、位置偏差等。通過對這些參數(shù)的實時監(jiān)測和分析,可以及早發(fā)現(xiàn)異常狀態(tài),預測剩余壽命,合理安排維修計劃,避免突發(fā)故障導致操舵失效。
控制策略的優(yōu)化同樣是提高EMA可靠性的關鍵。為了實現(xiàn)EMA系統(tǒng)高可靠性工作,需要先進的伺服控制技術作為支撐。舵用EMA工作環(huán)境復雜,存在難以預測的沖擊干擾,需要控制算法在保證響應速度的同時也要兼顧一定的抗干擾能力。先進控制策略的研究主要集中在擾動觀測與補償技術、魯棒控制技術、智能控制技術等方面。擾動觀測器可以估計外部擾動和模型不確定性,在控制量中進行補償,提高系統(tǒng)的抗干擾能力。魯棒控制器設計能夠使系統(tǒng)在參數(shù)變化和外部擾動下仍保持穩(wěn)定和性能。智能控制技術如模糊控制、神經(jīng)網(wǎng)絡控制等,能夠處理非線性、時變等復雜特性。
中國科學院大學將電動舵機的擾動問題分為由加工、裝配、磨損等因素引起的間隙擾動和由加載、沖擊、精度、形變等因素引發(fā)的摩擦擾動,并建立了擾動數(shù)學模型;使用基于PID的改進滑模算法將舵機的跟蹤精度從0.11°提高至0.02°,并有效抑制了抖動問題。這一研究表明,先進控制算法可以顯著提升舵用EMA的控制精度和穩(wěn)定性。

四、舵用機電作動器技術優(yōu)勢與未來展望
4.1 技術優(yōu)勢的系統(tǒng)性梳理
EMA自誕生伊始便展現(xiàn)了其在運動控制領域所具備的優(yōu)勢。綜合分析國內(nèi)外針對EMA的相關研究,盡管其在熱效應、傳動機構卡阻率等方面存在不足,但EMA在水下裝備操舵領域的應用仍然具備顯著優(yōu)越性。
裝置復雜度低是EMA的首要優(yōu)勢。EMA僅由機電裝置構成,取消了傳統(tǒng)液壓作動系統(tǒng)中的液壓泵、油管、閥門、油箱等復雜液壓元件,系統(tǒng)結構大幅簡化。這種簡化的結構帶來了更高的能量效率和更好的動態(tài)特性,為深海潛水器操舵裝置作動機構的靈活布置提供了技術基礎。能量效率的提升意味著更低的能耗和更長的續(xù)航時間,這對水下裝備尤為重要。
安全性和可維護性高是EMA的另一突出優(yōu)勢。通過減省液壓油及其輸運管線,EMA從根本上消除了液壓油泄漏的風險,避免了對海洋環(huán)境造成污染。電氣化設備具備更強的自我故障診斷能力,可以實時監(jiān)測運行狀態(tài),及時發(fā)現(xiàn)潛在故障。維護工作更加簡單,維護成本顯著降低。對于部署在遠海、深海的潛水器而言,這一優(yōu)勢尤為突出。
體積重量優(yōu)勢顯著也是EMA的重要特點。EMA減少了功率傳輸路徑的重量、體積和復雜性,能夠更有利于實現(xiàn)深海潛水器所需的高結構強度、高可靠性與可維護性。緊湊的結構為潛水器內(nèi)部空間布置提供了更大的靈活性,有利于實現(xiàn)操舵裝置的小型化和舷外布置。
動態(tài)響應特性優(yōu)異是EMA的技術亮點。EMA的電氣傳動特性使其具有快速的動態(tài)響應能力,可以更快地響應操舵指令,實現(xiàn)更高的控制帶寬。這對于需要精確控制的潛水器操縱運動而言具有重要意義。
4.2 未來技術發(fā)展方向
展望未來,舵用機電作動器技術將朝著高功率密度化、高可靠性設計、智能化控制、環(huán)境適應性增強、一體化集成設計等方向持續(xù)演進。
高功率密度化是EMA技術發(fā)展的首要方向。深海潛水器對作動裝置的體積和重量有著嚴苛限制,提高EMA的功率密度是持續(xù)的研究目標。這需要從電機、減速器、絲杠等各個部件入手,采用高性能材料、優(yōu)化結構設計、提高電磁負荷,在相同體積下輸出更大的功率和扭矩。新型永磁材料的應用、電磁設計的優(yōu)化、散熱技術的改進,都將有助于提升EMA的功率密度。
高可靠性設計是EMA應用拓展的基礎。水下裝備對可靠性的要求極高,EMA需要具備在極端環(huán)境下長期穩(wěn)定工作的能力。未來將從冗余設計、容錯控制、健康管理等多個維度提升EMA的可靠性。雙余度、三余度甚至全余度設計將逐步應用于關鍵任務場合。故障診斷與容錯控制算法將更加智能化,能夠在故障發(fā)生后自動重構系統(tǒng),維持基本功能。健康管理系統(tǒng)將從狀態(tài)監(jiān)測向故障預測和自主維護決策發(fā)展。
智能化控制是EMA技術升級的方向。隨著人工智能技術的發(fā)展,智能控制算法將更多地應用于EMA控制系統(tǒng)。自適應控制、學習控制、預測控制等方法將進一步提升EMA的跟蹤精度和抗干擾能力。神經(jīng)網(wǎng)絡、深度學習等技術的引入,將使EMA能夠從運行數(shù)據(jù)中學習系統(tǒng)特性,自動優(yōu)化控制參數(shù),適應工況變化。
環(huán)境適應性增強是EMA拓展應用場景的關鍵。針對深海高壓、低溫、腐蝕等惡劣環(huán)境,EMA的耐壓、耐腐蝕、低溫適應性等技術將持續(xù)提升。壓力補償技術、密封技術、防腐涂層技術等將得到進一步發(fā)展和應用。新材料技術的突破,如高性能密封材料、耐腐蝕合金、高強度復合材料等,將為EMA的環(huán)境適應性提升提供支撐。
一體化集成設計是EMA結構優(yōu)化的重要方向。電機、減速器、絲杠、控制器等部件的一體化集成設計將進一步提高EMA的緊湊性和可靠性。取消減速器的直驅(qū)式EMA、集成式驅(qū)動控制器等新型結構將逐步成熟。通過減少部件數(shù)量和連接環(huán)節(jié),一體化設計有助于降低故障率,提高整體可靠性。
機電作動器技術經(jīng)過數(shù)十年的發(fā)展,已在航空航天領域取得了成功應用,并正逐步向海洋裝備領域拓展。舵用EMA以其結構簡單、可靠性高、維護性好、控制精度高等優(yōu)勢,為深海潛水器操舵裝置提供了理想的技術解決方案。針對深海潛水器能源形式精簡化與清潔化、操縱運動控制精細化、減震降噪、操舵裝置作動器小型化與舷外布置等現(xiàn)實需求,基于EMA進行構建是構成深海潛水器操舵裝置的理想技術方案。
盡管目前舵用EMA在滾柱絲杠失效、瞬時高過載耐受、熱堆積等方面仍存在技術挑戰(zhàn),但通過材料工藝改進、結構優(yōu)化設計、先進控制策略應用以及健康管理技術的引入,這些問題正在逐步得到解決。隨著相關技術的持續(xù)進步,舵用EMA必將獲得更廣泛的應用,為深海潛水器的發(fā)展提供更加強有力的技術支持。
從機電作動器技術發(fā)展視角來看,舵用EMA技術的發(fā)展需要產(chǎn)學研用各方的協(xié)同努力。在基礎研究層面,需要深入探索關鍵部件的失效機理和壽命預測方法;在技術開發(fā)層面,需要突破高功率密度電機、高精度減速器、長壽命絲杠等核心部件的設計和制造技術;在工程應用層面,需要積累實際工況下的運行數(shù)據(jù)和維護經(jīng)驗,不斷優(yōu)化設計和工藝。唯有如此,才能推動舵用EMA技術不斷進步,為深海裝備的發(fā)展貢獻力量。
&注:由于小編水平有限,對所閱讀文獻的翻譯及總結難免有誤,錯誤之處敬請指正,非常感謝。本公眾號推送內(nèi)容以交流學習為目的,并非商業(yè)用途,所使用的配圖均來源于公開網(wǎng)絡獲取,如有侵權,請聯(lián)系協(xié)商處理。

湖南泰德航空技術有限公司于2012年成立,多年來持續(xù)學習與創(chuàng)新,成長為行業(yè)內(nèi)有影響力的高新技術企業(yè)。公司聚焦高品質(zhì)航空航天流體控制元件及系統(tǒng)研發(fā),深度布局航空航天、船舶兵器、低空經(jīng)濟等高科技領域,在航空航天燃/滑油泵、閥元件、流體控制系統(tǒng)及航空測試設備的研發(fā)上投入大量精力持續(xù)研發(fā),為提升公司整體競爭力提供堅實支撐。
公司總部位于長沙市雨花區(qū)同升街道匯金路877號,株洲市天元區(qū)動力谷作為現(xiàn)代化生產(chǎn)基地,構建起集研發(fā)、生產(chǎn)、檢測、測試于一體的全鏈條產(chǎn)業(yè)體系。經(jīng)過十余年穩(wěn)步發(fā)展,成功實現(xiàn)從貿(mào)易和航空非標測試設備研制邁向航空航天發(fā)動機、無人機、靶機、eVTOL等飛行器燃油、潤滑、冷卻系統(tǒng)的創(chuàng)新研發(fā)轉(zhuǎn)型,不斷提升技術實力。
公司已通過 GB/T 19001-2016/ISO 9001:2015質(zhì)量管理體系認證,以嚴苛標準保障產(chǎn)品質(zhì)量。公司注重知識產(chǎn)權的保護和利用,積極申請發(fā)明專利、實用新型專利和軟著,目前累計獲得的知識產(chǎn)權已經(jīng)有10多項。湖南泰德航空以客戶需求為導向,積極拓展核心業(yè)務,與國內(nèi)頂尖科研單位達成深度戰(zhàn)略合作,整合優(yōu)勢資源,攻克多項技術難題,為進一步的發(fā)展奠定堅實基礎。
湖南泰德航空始終堅持創(chuàng)新,建立健全供應鏈和銷售服務體系、堅持質(zhì)量管理的目標,不斷提高自身核心競爭優(yōu)勢,為客戶提供更經(jīng)濟、更高效的飛行器動力、潤滑、冷卻系統(tǒng)、測試系統(tǒng)等解決方案。
-
電機
+關注
關注
144文章
9667瀏覽量
154561 -
減速器
+關注
關注
7文章
430瀏覽量
24524 -
機電作動器
+關注
關注
0文章
3瀏覽量
1097
發(fā)布評論請先 登錄
跪求諧波減速器的廠家
著名的松下伺服電機之中的1000W應該用那個系列的減速器?
工業(yè)機器人的Rv減速器和諧波減速器對比分析
RV減速器和諧波減速器的對比分析
淺析RV減速器和諧波減速器的區(qū)別
綠的諧波公司在機器人諧波減速器業(yè)務中的發(fā)展情況分析
綠的諧波減速器全球第二,未來將如何實現(xiàn)國產(chǎn)替代

工業(yè)機器人的RV減速器和諧波減速器有什么區(qū)別?

機器人產(chǎn)業(yè)鏈系列|減速器及國內(nèi)外頭部減速器企業(yè)梳理



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論