 步進電機的位置控制與速度控制
步進電機的位置控制與速度控制

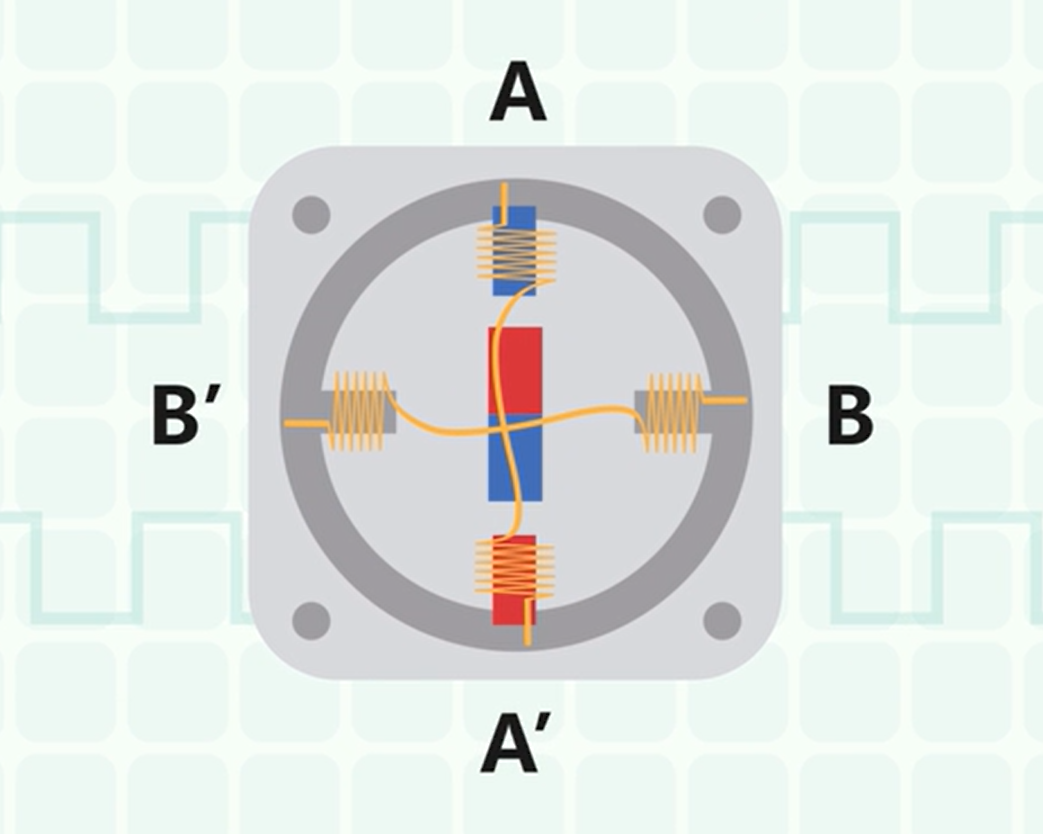
步進電機是一種將電脈沖信號轉換為角位移或線位移的執行元件,其位置控制與速度控制是兩大核心應用。雖然兩者在實現上緊密相關,但控制目標和策略有本質區別。

一、 核心原理回顧
步進電機的運動由脈沖驅動:
一個脈沖→ 轉子轉動一個步距角(例如1.8°)
脈沖頻率→ 決定轉速
脈沖總數→ 決定總轉角(位置)
這意味著:控制了脈沖,就同時控制了位置和速度。
二、 位置控制
1. 控制目標
使電機精確到達指定的角度或圈數,對最終停止位置的精度要求高,對中間過程的速度曲線要求相對較低(但為平穩性仍需規劃)。
2. 實現方式
| 方式 | 說明 |
|---|---|
| 開環控制 | 最常見。控制器發出指定數量的脈沖,依靠步進電機的固有步距角保證位置精度,無反饋。前提是不發生失步或過沖。 |
| 閉環控制 | 增加編碼器反饋,實時比較目標位置與當前位置,修正脈沖輸出。可避免失步,提高高速或變負載下的定位可靠性。 |
3. 關鍵要素
脈沖總數:目標位置=脈沖數×步距角×細分數。
加減速曲線:為保證定位不丟步,通常采用梯形或S型加減速,尤其是負載慣性較大時。
零位/原點:位置控制通常需要建立機械原點(回零操作)。
三、 速度控制
1. 控制目標
使電機以設定的轉速持續運行,或按特定速度曲線變化,對速度的平穩性和響應時間要求高。
2. 實現方式
| 方式 | 說明 |
|---|---|
| 脈沖頻率控制 | 直接改變輸出脈沖的頻率。頻率越高,轉速越快。 |
| 模擬量調速 | 部分驅動器支持通過0~10V或4~20mA模擬量輸入控制速度,內部轉換為對應頻率。 |
| 速度閉環 | 通過編碼器反饋實際速度,與目標速度比較,調整驅動電壓或脈沖頻率,實現恒速控制。 |
3. 關鍵要素
矩頻特性:步進電機轉速升高時,輸出轉矩下降。速度控制需確保負載轉矩不超過當前轉速下的可用轉矩。
共振區規避:步進電機在中低速區域存在共振點,速度控制時應快速通過或采用細分驅動來抑制振動。
加減速時間:在速度指令變化時,需設置合適的加減速時間,防止失步或電流沖擊。
四、 位置控制與速度控制的對比
| 對比項 | 位置控制 | 速度控制 |
|---|---|---|
| 控制量 | 脈沖總數 | 脈沖頻率(或模擬量) |
| 反饋需求 | 開環即可,閉環用于高可靠性 | 可開環,閉環用于高精度恒速 |
| 運動特點 | 點對點定位,有起點和終點 | 連續運行,通常無固定終點 |
| 主要應用 | 數控機床、3D打印機、機械臂關節 | 傳送帶、風機、泵類、卷繞設備 |
| 加減速 | 重要,防止終點過沖或失步 | 重要,防止起動失敗或速度突變 |
| 精度影響 | 受失步影響,閉環可修正 | 受負載波動影響,閉環可穩速 |
(一)位置控制典型流程
設定目標位置(脈沖數)。
設定加減速曲線參數(起跳頻率、加速斜率、最高頻率)。
啟動脈沖輸出,按加減速曲線輸出脈沖。
達到目標脈沖數后停止,并可能觸發剎車或鎖相電流維持位置。
(二)速度控制典型流程
設定目標速度(對應脈沖頻率)。
設定加減速時間(或直接給定頻率,允許瞬時變化)。
持續輸出固定頻率脈沖(或連續模擬量)。
停止時按減速曲線降速至零。
(三)混合應用
許多運動控制系統同時需要位置和速度控制。例如:
電子凸輪:主軸(速度模式)與從軸(位置模式)同步。
點位運動:在位置控制過程中,中間段按恒定速度運行(速度控制特征)。
六、 常見問題與注意事項
失步問題
位置控制中失步會導致位置丟失。
速度控制中失步會導致速度不穩定或停轉。
解決方案:增大驅動電流、降低加速度、采用閉環控制。
低速振動
速度控制在低速時振動明顯。
可通過細分驅動、增加阻尼、避開共振區速度來改善。
高速轉矩下降
速度控制需驗證最高速時是否仍有足夠轉矩。
若不足,需提高供電電壓或換用更大規格電機。
原點回歸
位置控制通常需要絕對或相對原點,多采用光電/霍爾傳感器回零。
審核編輯 黃宇
-
步進電機
+關注
關注
153文章
3262瀏覽量
152634
發布評論請先 登錄
多功能步進電機驅動控制板設計:適配多場景的集成化方案

采用MT6835絕對式磁編碼器實現高精度閉環步進電機控制
基于MT6835磁編碼器IC的步進電機全閉環伺服控制策略
【技術揭秘】PCle-1E16的脈沖控制,如何實現電機的精準驅動?

高精度磁位置反饋:麥歌恩MT6835賦能閉環步進電機性能躍升
單片機怎么控制步進電機的
步進電機控制指令詳解




 工商網監
工商網監
評論