") 賦能智慧工廠:具身智能工業(yè)機(jī)器人3D視覺引導(dǎo)CNC機(jī)床上下料系統(tǒng)
賦能智慧工廠:具身智能工業(yè)機(jī)器人3D視覺引導(dǎo)CNC機(jī)床上下料系統(tǒng)

引言
隨著“中國制造2025”戰(zhàn)略的深入推進(jìn),制造業(yè)自動(dòng)化與智能化水平持續(xù)提升。CNC機(jī)床作為工業(yè)母機(jī),其上下料工序的效率直接決定了生產(chǎn)線的整體產(chǎn)能。傳統(tǒng)人工或?qū)C(jī)上下料方式存在柔性不足、效率低下、易發(fā)生工傷事故等局限性,難以適應(yīng)多品種、小批量的現(xiàn)代制造需求。在此背景下,融合移動(dòng)底盤與機(jī)械臂的具身智能工業(yè)機(jī)器人成為破解CNC上下料難題的關(guān)鍵裝備。

第一章 復(fù)合機(jī)器人CNC上下料系統(tǒng)架構(gòu)與視覺引導(dǎo)原理
1.1 系統(tǒng)基本構(gòu)成
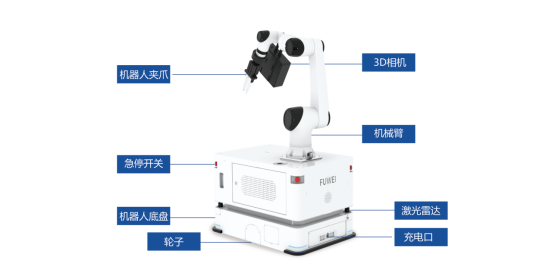
智能復(fù)合機(jī)器人CNC上下料系統(tǒng)主要由五部分構(gòu)成:CNC機(jī)床群、自動(dòng)導(dǎo)引小車(AGV)、協(xié)作機(jī)器人、視覺檢測系統(tǒng)及自動(dòng)化倉庫。其中,AGV負(fù)責(zé)跨機(jī)床物料運(yùn)輸,協(xié)作機(jī)器人執(zhí)行精確抓取與放置操作,視覺系統(tǒng)則承擔(dān)環(huán)境感知與定位引導(dǎo)的核心功能。
當(dāng)前前沿技術(shù)方案中,復(fù)合機(jī)器人通常采用“2D相機(jī)+3D相機(jī)”的雙目視覺配置。2D相機(jī)用于快速識(shí)別定位標(biāo)識(shí)板,3D相機(jī)則負(fù)責(zé)獲取工件與機(jī)床卡盤的三維點(diǎn)云數(shù)據(jù)。這種配置在部署階段使用雙相機(jī)輔助標(biāo)定,在穩(wěn)定運(yùn)行階段可根據(jù)場景需求靈活切換,既保證了定位精度,又控制了系統(tǒng)成本。
1.2 視覺引導(dǎo)技術(shù)原理
2D/3D視覺引導(dǎo)的核心在于通過圖像處理與點(diǎn)云分析,具身智能工業(yè)機(jī)器人實(shí)現(xiàn)目標(biāo)物體的精準(zhǔn)識(shí)別與定位。2D視覺主要依賴特征匹配算法,通過YOLO等目標(biāo)檢測模型識(shí)別工件輪廓與定位標(biāo)識(shí);3D視覺則通過結(jié)構(gòu)光或雙目立體視覺獲取深度信息,生成三維點(diǎn)云模型。
在CNC機(jī)床上下料這一典型場景中,視覺系統(tǒng)面臨多重挑戰(zhàn):機(jī)床內(nèi)部空間狹窄、切屑液與油污污染、金屬工件反光干擾等。針對這些問題,最新學(xué)術(shù)研究提出采用“由粗到精”的匹配策略:先通過全局幾何結(jié)構(gòu)篩選關(guān)鍵點(diǎn)位,再結(jié)合局部與全局圖匹配方法,實(shí)現(xiàn)高精度六自由度姿態(tài)估計(jì)。
二、 知識(shí)驅(qū)動(dòng)的具身智能工業(yè)機(jī)器人技術(shù)框架
2.1 從傳統(tǒng)控制到具身智能的范式躍遷
傳統(tǒng)工業(yè)機(jī)器人依賴于預(yù)先示教編程,在面對環(huán)境變化時(shí)缺乏自適應(yīng)能力。具身智能(Embodied Intelligence)概念的提出,為工業(yè)機(jī)器人賦予了感知-認(rèn)知-行動(dòng)的閉環(huán)能力。
該框架包含五大模塊:世界模型(存儲(chǔ)環(huán)境通用知識(shí))、高層任務(wù)規(guī)劃器(分解復(fù)雜任務(wù))、底層技能控制器(執(zhí)行具體動(dòng)作)、仿真器(預(yù)演與優(yōu)化)及物理系統(tǒng)(實(shí)際執(zhí)行機(jī)構(gòu))。這一架構(gòu)使得機(jī)器人不僅具備執(zhí)行能力,更擁有對環(huán)境、任務(wù)與自身的認(rèn)知能力。
三、 三維定位識(shí)別與多機(jī)協(xié)同關(guān)鍵技術(shù)
3.1 高精度三維定位算法
三維定位識(shí)別是實(shí)現(xiàn)精密CNC上下料的技術(shù)核心。德克薩斯大學(xué)阿靈頓分校的最新博士研究提出了一種受生物啟發(fā)的混合時(shí)空記憶建圖框架,將局部度量地圖與全局拓?fù)涞貓D相結(jié)合,通過RGB-D視覺輸入實(shí)現(xiàn)厘米級導(dǎo)航精度。該框架模擬人類海馬體的空間認(rèn)知機(jī)制,從深度圖像中提取顯著性權(quán)重關(guān)鍵幀,構(gòu)建基于點(diǎn)的神經(jīng)場或三維高斯基元表示,為機(jī)器人在狹窄機(jī)床空間內(nèi)的精確定位提供了理論支撐。
在實(shí)際CNC上下料場景中,視覺糾偏算法尤為關(guān)鍵。研究顯示,通過識(shí)別機(jī)床卡盤特征與末端作業(yè)面,結(jié)合坐標(biāo)轉(zhuǎn)換與無線IO控制,可將定位誤差降低87%以上。具體實(shí)現(xiàn)路徑包括:首先通過2D相機(jī)獲取卡盤大致位置,再以3D相機(jī)掃描獲取精確點(diǎn)云,最終通過迭代最近點(diǎn)(ICP)算法完成精準(zhǔn)對齊。
3.2 多機(jī)器人協(xié)同全局定位
在規(guī)模化智能制造車間中,單臺(tái)復(fù)合機(jī)器人往往需要服務(wù)多臺(tái)CNC設(shè)備,多機(jī)器人協(xié)同成為必然需求。哈工大(深圳)梅杰教授團(tuán)隊(duì)發(fā)表于IJRR的研究,通過將時(shí)間窗口內(nèi)協(xié)同定位問題轉(zhuǎn)化為最大后驗(yàn)估計(jì)(MAP),并結(jié)合線性相對定位算法與神經(jīng)網(wǎng)絡(luò)概率密度估計(jì)器,在強(qiáng)噪聲環(huán)境下實(shí)現(xiàn)了高精度多機(jī)器人相對定位。
總結(jié)
智能復(fù)合機(jī)器人結(jié)合2D/3D視覺引導(dǎo)與三維定位識(shí)別技術(shù),正在重塑CNC機(jī)床上下料的作業(yè)范式,富唯智能基于知識(shí)驅(qū)動(dòng)具身智能工業(yè)機(jī)器人框架,將GRID大模型、虛實(shí)融合仿真、多模態(tài)感知等技術(shù)融入復(fù)合機(jī)器人產(chǎn)品,實(shí)現(xiàn)了±0.02mm精度與多機(jī)協(xié)同能力。
展望未來,隨著具身智能理論的持續(xù)演進(jìn)與視覺算法的不斷優(yōu)化,復(fù)合機(jī)器人將在柔性制造領(lǐng)域發(fā)揮更為關(guān)鍵的作用,助力制造業(yè)邁向真正的智能化轉(zhuǎn)型。
審核編輯 黃宇
-
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3544瀏覽量
98435 -
具身智能
+關(guān)注
關(guān)注
0文章
440瀏覽量
899
發(fā)布評論請先 登錄
鋰電企業(yè)必看!如何通過知識(shí)驅(qū)動(dòng)的具身智能工業(yè)機(jī)器人實(shí)現(xiàn)物流“零事故、零延誤”停靠
具身智能工業(yè)機(jī)器人邊緣控制器機(jī)床上下料實(shí)戰(zhàn)
工廠內(nèi)物流機(jī)器人+無序抓取, 復(fù)合機(jī)器人機(jī)床上下料賦能智能制造升級
破解柔性生產(chǎn)難題:知識(shí)驅(qū)動(dòng)具身智能工業(yè)機(jī)器人的實(shí)戰(zhàn)應(yīng)用指南

3D視覺引導(dǎo)拆碼垛:一文讀懂“機(jī)器眼”如何指揮機(jī)器人搬貨?

具身智能交流會(huì)
基于3D視覺引導(dǎo)的移動(dòng)式復(fù)合機(jī)器人設(shè)計(jì):智能自動(dòng)化革命的核心技術(shù)

解放CNC產(chǎn)線的全能伙伴:一體復(fù)合機(jī)器人開啟智能上下料新篇章

復(fù)合機(jī)器人在工廠上下料場景中的優(yōu)勢是什么?

賦能CNC加工:經(jīng)世智能復(fù)合機(jī)器人,打造無人化生產(chǎn)車間

機(jī)器人上下料:驅(qū)動(dòng)現(xiàn)代智能制造的高效引擎
移動(dòng)的智慧:復(fù)合機(jī)器人開啟24小時(shí)不間斷上下料新紀(jì)元
CNC行業(yè)|復(fù)合機(jī)器人CNC上下料及自動(dòng)換刀解決方案

《人民日報(bào)》報(bào)道!中科億海微“中國芯”賦能具身智能機(jī)器人

具身智能工業(yè)機(jī)器人:引爆制造業(yè)‘自進(jìn)化’革命




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論