 機器人拆碼垛中高精度放置與垛型構建的解析分析:技術路徑與核心要素
機器人拆碼垛中高精度放置與垛型構建的解析分析:技術路徑與核心要素

機器人拆碼垛作為智能物流與自動化生產的關鍵環節,其核心目標不僅是高效完成物料搬運,更需在放置環節實現高精度定位與穩定垛型構建。高精度放置與垛型構建能力直接決定拆碼垛系統的效率、安全性及柔性化水平。本文深入解析該技術路徑,探討其核心要素、挑戰及發展趨勢,揭示機器人如何實現“精準放置”與“智能堆疊”。
一、高精度放置的技術路徑:從感知到執行的閉環控制
1. 三維感知與定位:
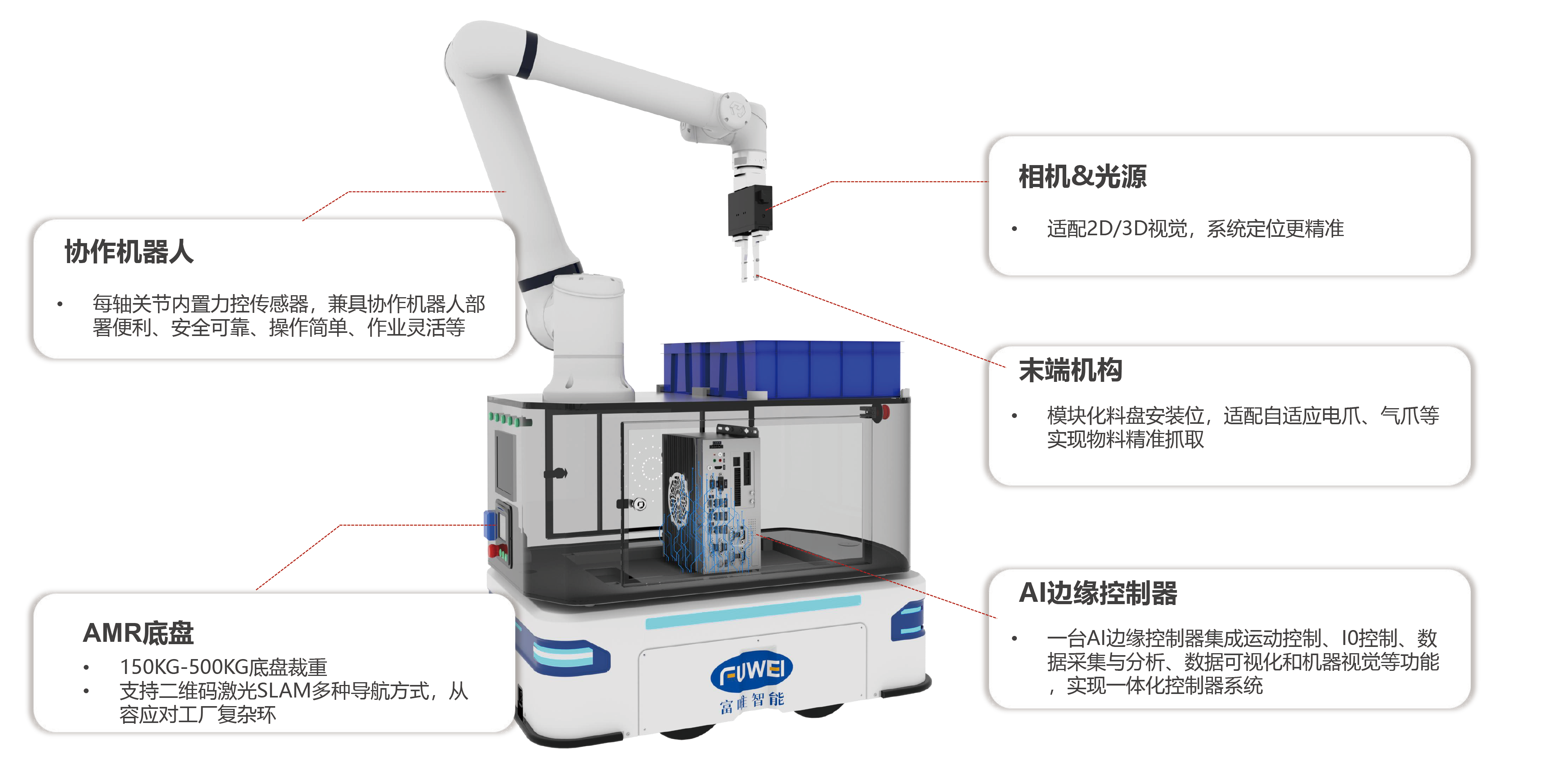
○ 3D視覺系統:通過結構光、ToF或雙目視覺技術,實時掃描目標區域生成高分辨率點云,結合深度學習算法(如PointNet)進行物體分割與六自由度姿態估計,確保毫米級定位精度。
○ 多傳感器融合:融合激光雷達、IMU數據,優化動態環境下的定位魯棒性,尤其在反光表面、透明物體或復雜背景場景中提升可靠性。
2. 路徑規劃與運動控制:
○ 動態路徑優化:基于RRT或A算法,結合實時環境約束(如障礙物、目標位姿)生成無碰撞軌跡,并通過軌跡平滑技術減少機械臂振動,保障放置穩定性。
○ 力控與柔順運動:末端執行器集成六軸力/扭矩傳感器,實現接觸力閉環控制。在放置過程中,通過力反饋動態調整姿態與速度,避免因接觸偏差導致的放置誤差或物料損壞。
3. 閉環校正與誤差補償:
○ 引入視覺伺服技術,在放置過程中通過實時視覺反饋修正機械臂末端偏移,補償累計誤差(如傳動系統間隙、熱變形等),確保最終位置精度。
二、垛型構建的策略與優化:穩定性與效率的雙重追求
1. 垛型穩定性分析:
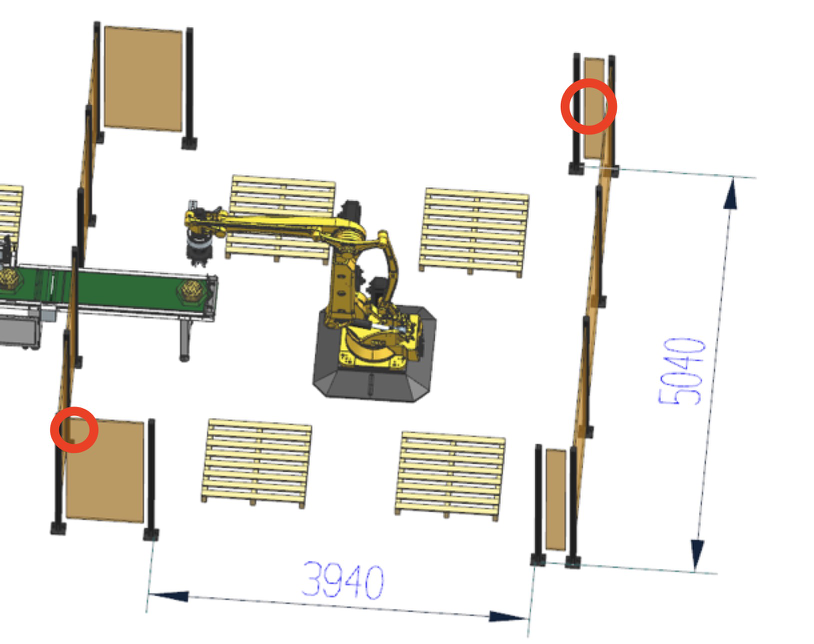
○ 重心與力學建模:基于貨物尺寸、重量及堆疊順序,通過力學仿真計算垛型重心分布與層間摩擦力,預判傾倒風險。例如,采用“下重上輕、重心居中”原則規劃每層布局。
○ 動態調整機制:在碼垛過程中,實時監測垛型形變(如傾斜、沉降),通過視覺系統反饋調整后續貨物的放置位置與姿態,維持垛體結構穩定。
2. 效率與空間優化:
○ 緊湊碼垛算法:通過啟發式算法(如遺傳算法、模擬退火)優化貨物排列,最大化托盤利用率并縮短機械臂運動距離,提升吞吐量。
○ 節拍協同:與輸送線、倉儲系統聯動,動態調度拆垛與碼垛節奏,避免因等待導致的效率損失。
三、技術挑戰與突破方向
1. 復雜場景適應性:
○ 不規則形狀、柔性材質或表面缺陷貨物的精準定位與適應性放置仍需強化算法魯棒性,結合觸覺傳感器實現“感知-執行”協同。
2. 實時性與精度平衡:
○ 高分辨率點云處理與AI推理需更高算力支持,邊緣計算與輕量化神經網絡模型(如MobileNet)的應用成為關鍵。
3. 人機協作安全:
○ 在共享工作空間中,需融合激光安全掃描儀與動態風險評估算法,確保高精度放置過程中人員與設備安全。
四、未來趨勢:智能化與柔性化升級
1. AI驅動的自適應碼垛:通過遷移學習與強化學習,機器人可自主適應新型物料或垛型規范,減少人工編程依賴。
2. 數字孿生與預測控制:構建虛擬垛型仿真系統,提前驗證碼垛策略,優化參數并預判潛在風險。
3. 多模態感知融合:整合視覺、聽覺(如碰撞聲檢測)、熱成像等多維度信息,增強異常狀態檢測能力(如物料損壞、堆疊錯位)。
結語
高精度放置與智能垛型構建是機器人拆碼垛技術邁向高端應用的核心。通過感知、控制、AI的深度融合,機器人正從“執行者”轉變為“智能規劃者”,在物流、制造等領域實現更高效、安全、柔性的物料處理。未來,隨著技術瓶頸的突破,機器人拆碼垛系統將更深度賦能智能工廠與智慧物流,重塑自動化生產范式。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31073瀏覽量
222162
發布評論請先 登錄
手機玻璃、拆碼垛、高精度測量……背后的3D視覺功臣是誰?

再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
機器人內部零配件的生產加工廠從哪找?
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
RFID技術與碼垛機器人深度協同的核心難題與破局之道
碼垛機器人遠程運維云平臺解決方案

重新定義精密制造!富唯智能高精度裝配人形機器人引領智造革命

AS-33C激光雷達,為碼垛機器人打造無懈可擊的安全屏障
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
工業機器人高精度控制方法:富唯智能開啟工業制造的“毫米級革命”
其利天下技術·伺服電機在機器人技術中的應用




 工商網監
工商網監
評論