 SiC碳化硅矩陣變換器在機器人關節伺服系統中的拓撲精簡與高動態響應
SiC碳化硅矩陣變換器在機器人關節伺服系統中的拓撲精簡與高動態響應

傾佳楊茜-伺服方案:SiC碳化硅矩陣變換器在機器人關節伺服系統中的拓撲精簡與高動態響應技術深度賦能研究報告
引言:下一代機器人關節伺服驅動的架構演進
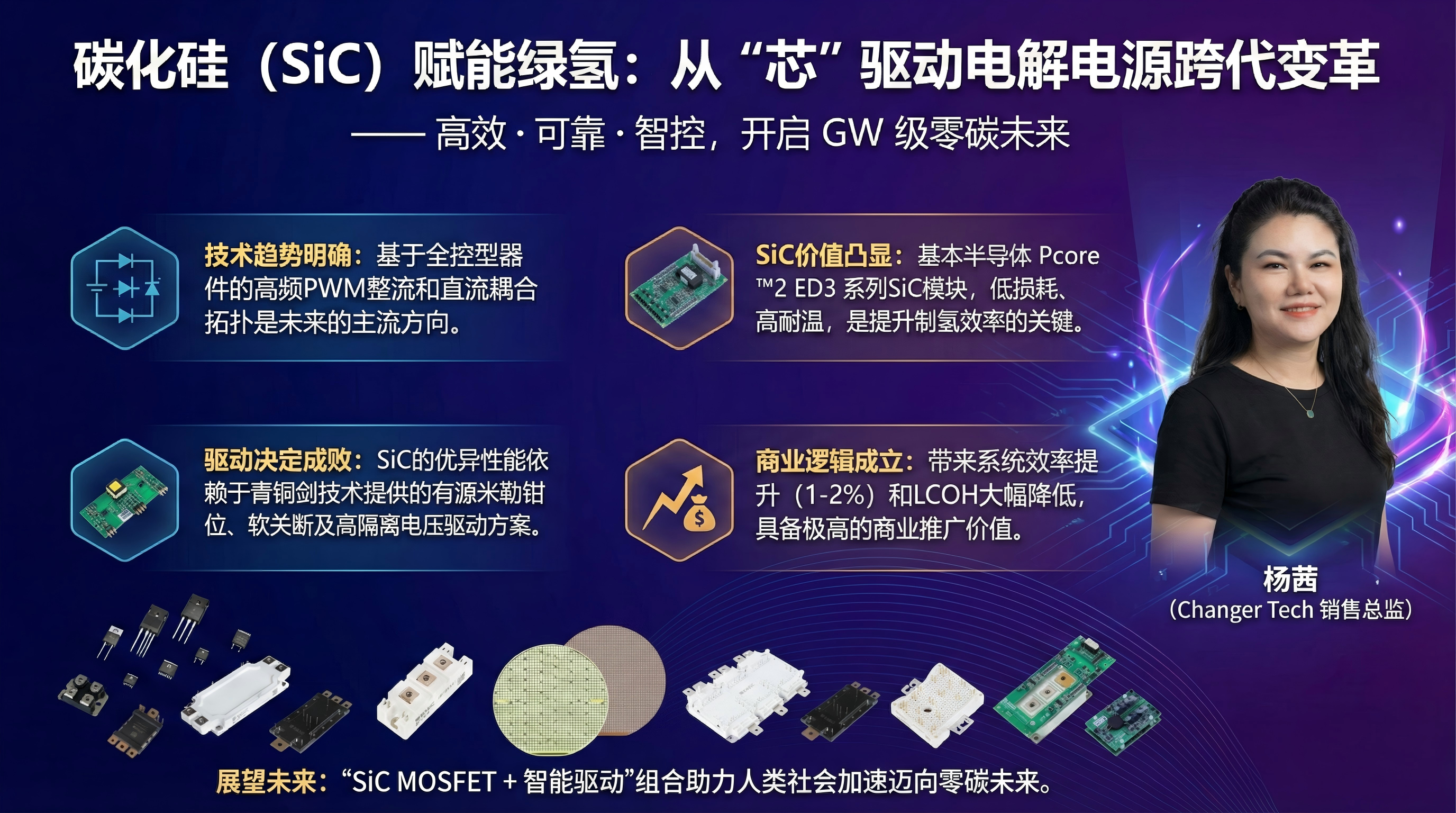
在現代工業自動化、協作機器人(Cobots)、醫療手術機械臂以及高精度多自由度鉸接臂的快速演進中,系統對關節伺服驅動器的要求正在經歷深刻的變革。高功率密度、極致緊湊的物理體積、極低的能量損耗以及亞毫秒級的動態響應速度,已成為定義先進機器人系統的核心指標。在傳統的多軸機器人架構中,伺服電機的功率電子變換器通常采用“交-直-交”(AC-DC-AC)電壓型逆變器(Voltage Source Inverter, VSI)拓撲。這種傳統拓撲嚴重依賴于三個核心級聯部分:前端整流器、中間直流母線(DC-link)儲能環節,以及后端高頻逆變器。

然而,這一傳統架構的根本物理與空間瓶頸在于中間直流母線上的大容量電解電容 。電解電容不僅占據了伺服驅動器印制電路板(PCB)高達30%至40%的物理空間,使其體積難以進一步壓縮,而且其固有的熱敏感性極大地限制了驅動系統的最高工作溫度和使用壽命。在空間極其受限且散熱條件嚴苛的機器人關節內部,電解電容成為了系統平均無故障時間(MTBF)的最薄弱環節。
為了徹底突破由直流電容帶來的物理與熱力學限制,“無電容”(Capacitor-less)的直接矩陣變換器(Direct Matrix Converter, DMC)拓撲應運而生 。矩陣變換器能夠實現從交流電源到交流負載的直接電能變換(AC-AC),完全消除了對中間直流儲能元件的依賴,從而實現拓撲的極致精簡 。然而,在過去幾十年中,基于傳統硅(Si)基絕緣柵雙極型晶體管(IGBT)的矩陣變換器在工業界的推廣舉步維艱。其主要原因在于硅基器件構成的雙向開關(Bidirectional Switch, BDS)存在嚴重的換流損耗,尤其是硅基二極管的反向恢復電荷(Qrr?)問題以及IGBT的關斷拖尾電流,這導致系統開關頻率受限,換流邏輯異常復雜,無法滿足高動態響應的需求 。傾佳電子力推BASiC基本半導體SiC碳化硅MOSFET單管,SiC碳化硅MOSFET功率模塊,SiC模塊驅動板,PEBB電力電子積木,Power Stack功率套件等全棧電力電子解決方案。?
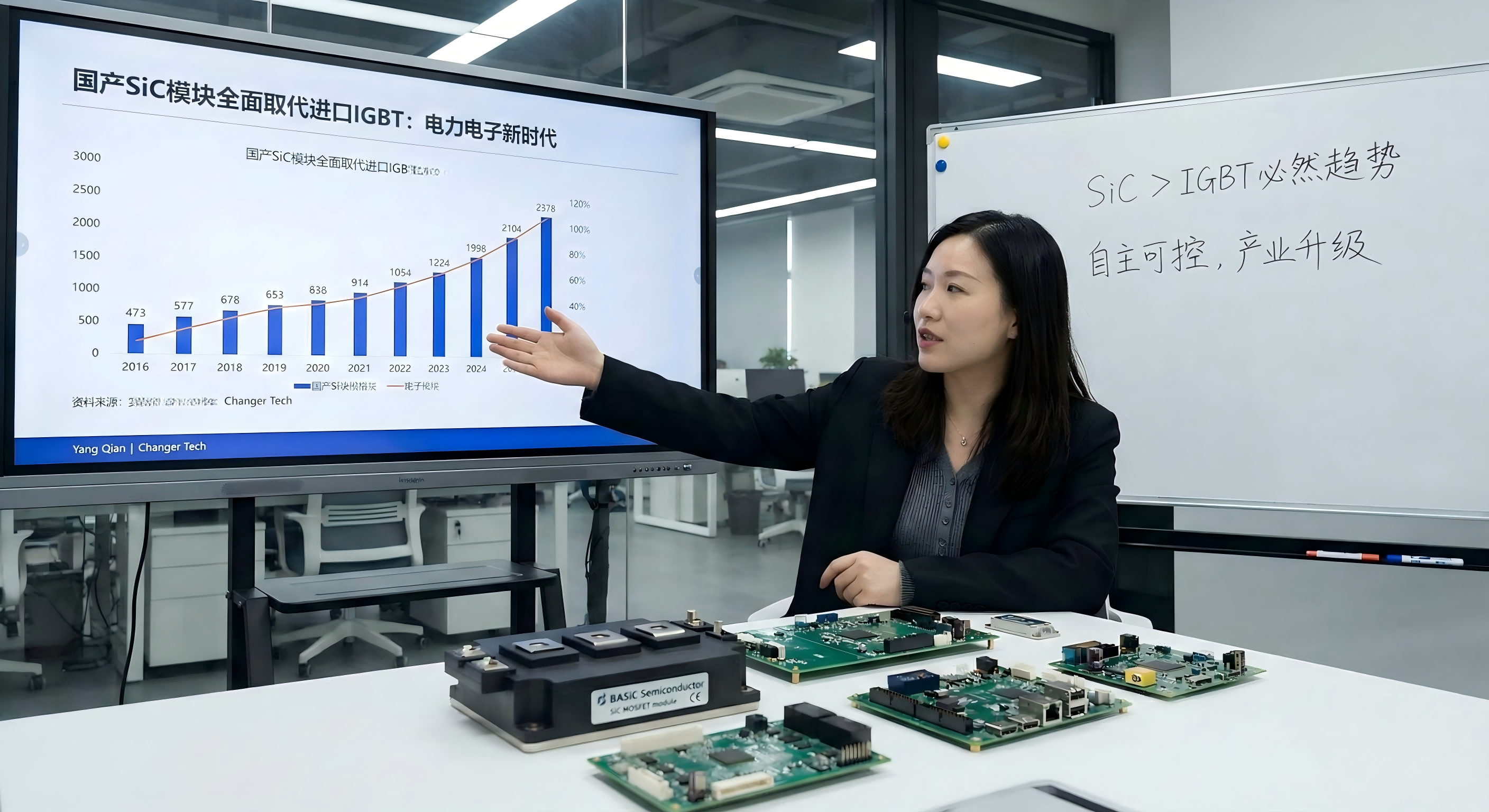
傾佳電子楊茜致力于推動國產SiC碳化硅模塊在電力電子應用中全面取代進口IGBT模塊,助力電力電子行業自主可控和產業升級!
隨著第三代寬禁帶(WBG)半導體技術,特別是碳化硅(SiC)MOSFET的成熟,矩陣變換器的應用迎來了歷史性的轉折 。SiC MOSFET憑借其極低的反向恢復電荷特性、超低的導通電阻(RDS(on)?)以及卓越的高頻開關能力,深度賦能了新型雙向開關方案的落地 。2025年的一系列前沿實驗表明,基于SiC雙向開關的無電容矩陣變換器驅動方案,在機器人手臂中展示了極高的動態響應速度,端到端延遲低至17毫秒,同時大幅降低了系統的能耗與體積 。傾佳電子楊茜將從拓撲精簡、SiC功率器件特性、四步換流策略、高隔離度驅動技術以及最新機器人實驗驗證等多個維度,對SiC矩陣變換器在機器人關節伺服系統中的深度賦能進行詳盡的技術剖析。
矩陣變換器拓撲精簡與雙向開關架構解析
直接交-交變換的數學與物理基礎
直接矩陣變換器的核心架構是一個由9個雙向功率開關構成的3×3陣列,該陣列將三相交流輸入電源直接連接至三相感性負載(如機器人關節中的永磁同步電機,PMSM) 。從數學建模的角度來看,矩陣變換器的傳遞函數可通過一個調制矩陣 M(t) 來描述。假設輸入電壓向量為 vi?(t),輸出電壓向量為 vo?(t),輸入電流向量為 ii?(t),輸出電流向量為 io?(t),則系統的控制方程可表示為:
vo?(t)=M(t)?vi?(t)
ii?(t)=MT(t)?io?(t)
由于拓撲中沒有任何無源儲能元件(如電感或電解電容),在理想開關條件下,輸入端的瞬時功率必須嚴格等于輸出端的瞬時功率。這一物理特性要求陣列中的每一個開關單元都必須具備雙向阻斷電壓和雙向傳導電流的能力 。由于真正的單片雙向開關(Monolithic Bidirectional Switch)目前仍處于實驗室或早期商業化階段,工業界普遍采用兩個分立的單向開關器件(如SiC MOSFET)組合構成一個雙向開關單元 。

共源極與共漏極雙向開關配置
在利用SiC MOSFET構建雙向開關時,工程上通常采用兩種基本拓撲配置:共源極(Common-Source)配置與共漏極(Common-Drain)配置 。
共源極配置(Common-Source) :在此架構中,兩個SiC MOSFET的源極(Source)背靠背相連。該配置的最大優勢在于,兩個MOSFET的柵極驅動電路可以共享同一個參考地電位(即連接在一起的源極)。因此,理論上僅需要一組隔離的供電電源即可同時驅動兩個器件,極大地簡化了柵極驅動器的硬件設計 。然而,其缺點在于漏極(Drain)分別連接至高壓輸入和輸出相,這對封裝的絕緣耐壓提出了更高要求。
共漏極配置(Common-Drain) :在此架構中,兩個MOSFET的漏極相連。雖然這種配置要求為每個雙向開關提供兩個完全獨立的隔離驅動電源,但它在熱管理和模塊封裝方面具有顯著優勢。由于功率器件的裸片(Die)底面通常為漏極,共漏極配置允許兩個裸片直接燒結在同一塊絕緣金屬基板(IMS)或活性金屬釬焊(AMB)陶瓷基板的同一個覆銅走線上,從而顯著降低了模塊內部的寄生電感(Lσ?)并優化了散熱路徑 。
對于無電容的矩陣變換器而言,最大限度地減小功率回路的寄生電感至關重要。因為系統中缺乏直流母線電容作為緩沖,在極高速度的換流瞬間,任何微小的寄生電感都會產生劇烈的電壓尖峰(Vspike?=Lσ??di/dt),這極易擊穿器件。基本半導體(BASiC Semiconductor)等領先廠商通過引入高性能的Si3?N4?(氮化硅)AMB基板和高溫燒結銀工藝,在優化熱阻的同時,將模塊內的雜散電感控制在極低水平(例如14nH及以下),為雙向開關的高頻安全運行提供了物理保障 。
針對機器人關節的體積壓縮效應
在機器人手臂的關節伺服系統中,空間的寸土寸金使得“無電容”架構的優勢被無限放大。傳統的VSI驅動器必須在PCB上預留大面積的柱狀空間以容納鋁電解電容,這使得驅動器通常呈方形或厚重的長方體結構 。
矩陣變換器通過直接AC-AC變換,只需在輸入端配置極小容量的高頻濾波電容(通常為薄膜電容或陶瓷電容),即可濾除開關頻率的高次諧波 。這種拓撲精簡使得工程師能夠將整個伺服驅動板設計為超薄的中空環形PCB。該環形驅動器可以直接嵌套在關節內部的諧波減速器或無框力矩電機外側,實現機電一體化的極致融合。體積的進一步壓縮不僅縮短了三相動力線的長度,從根本上削弱了電磁干擾(EMI)的輻射環路,同時還將機械臂的重心大幅向基座方向移動,有效降低了機械臂的轉動慣量,這是實現高動態響應軌跡規劃的物理前提 。
SiC MOSFET深度賦能:突破反向恢復與開關損耗瓶頸
高頻矩陣變換器的工業可行性,在很大程度上取決于硅基半導體向碳化硅(SiC)寬禁帶半導體的代際跨越。在傳統的基于Si IGBT的雙向開關中,必須反并聯快速恢復二極管(FRD)以提供反向電流通路。當交流電壓極性反轉,二極管需要從導通狀態切換為反向阻斷狀態時,其漂移區內積累的少數載流子必須被抽離。這一物理過程會產生巨大的反向恢復電流(Irrm?)和反向恢復電荷(Qrr?) 。在矩陣變換器復雜的換流過程中,Qrr?不僅會導致極高的反向恢復損耗(Err?),還會引發高頻振蕩,嚴重限制了開關頻率的提升。
傾佳電子楊茜咬住SiC碳化硅MOSFET功率器件三個必然,勇立功率半導體器件變革潮頭:
傾佳電子楊茜咬住SiC碳化硅MOSFET模塊全面取代IGBT模塊和IPM模塊的必然趨勢!
傾佳電子楊茜咬住SiC碳化硅MOSFET單管全面取代IGBT單管和大于650V的高壓硅MOSFET的必然趨勢!
傾佳電子楊茜咬住650V SiC碳化硅MOSFET單管全面取代SJ超結MOSFET和高壓GaN 器件的必然趨勢!
SiC MOSFET作為多子器件,從根本上消除了少數載流子復合帶來的困擾。更為關鍵的是,SiC MOSFET自帶的體二極管(Body Diode)也是一種單極型器件,具有極低的反向恢復電荷 。低反向恢復電荷特性是新型雙向開關方案能夠直接實現高效AC-AC變換的底層物理邏輯 。
BASiC 半導體SiC器件參數分析
以基本半導體(BASiC Semiconductor)的第三代(B3M)SiC MOSFET產品線為例,我們可以清晰地量化這種技術賦能。B3M系列基于6英寸晶圓平臺開發,實現了極低的比導通電阻(Ron,sp?≈2.5mΩ?cm2),并且顯著降低了品質因數(FOM =RDS(on)?×QG?),使其特別適合高頻開關應用 。
下表提取了基本半導體數款典型B3M系列分立器件的核心靜態與動態參數,這些參數對矩陣變換器的性能有著決定性影響:
| 關鍵參數 | B3M010C075Z (750V) | B3M011C120Z (1200V) | B3M013C120Z (1200V) | B3M020120ZN (1200V) |
|---|---|---|---|---|
| 最大漏源電壓 VDS(max)? | 750 V | 1200 V | 1200 V | 1200 V |
| 連續漏極電流 ID? (TC?=25°C) | 240 A | 223 A | 180 A | 127 A |
| 典型導通電阻 RDS(on)? (25°C) | 10 mΩ | 11 mΩ | 13.5 mΩ | 20 mΩ |
| 導通電阻 RDS(on)? (175°C) | 12.5 mΩ | 20 mΩ | 23 mΩ | 37 mΩ |
| 輸入電容 Ciss? | 5500 pF | 6000 pF | 5200 pF | 3850 pF |
| 輸出電容 Coss? | 370 pF | 250 pF | 215 pF | 157 pF |
| 總柵極電荷 QG? | 220 nC | 260 nC | 225 nC | 168 nC |
| 結到殼熱阻 Rth(jc)? | 0.20 K/W | 0.15 K/W | 0.20 K/W | 0.25 K/W |
表1:基本半導體(BASiC)B3M系列SiC MOSFET核心性能參數(來源于產品數據手冊 )。
在雙向開關的工作狀態中,電流必然同時流經兩個串聯的半導體器件(一個正向導通,一個反向導通) 。如果反向導通完全依賴體二極管,其高達3.5V至4.0V的正向壓降(VSD?)將產生巨大的導通損耗 。然而,SiC MOSFET具備第三象限同步整流能力。通過在反向導通期間施加高電平柵極電壓(如 +18V),電流可以通過溝道流通,此時的電壓降變為嚴格的歐姆接觸降壓(ID?×RDS(on)?)。以 B3M011C120Z 為例,其在 25°C 下的導通電阻僅為 11mΩ,即便在 175°C 高溫下也僅升至 20mΩ 。這種超低導通電阻結合同步整流技術,極大地彌補了矩陣變換器雙器件串聯帶來的導通損耗增加問題 。
此外,極低的輸出電容(Coss?,如 B3M020120ZN 僅為 157 pF)意味著在器件關斷狀態下存儲的能量(Eoss?)極小,這直接降低了硬開關條件下的開通損耗 。這些物理特性的疊加,使得基于SiC的矩陣變換器開關頻率可以輕松突破 50 kHz 甚至 100 kHz,不僅消除了音頻噪聲,更將電流控制環路的帶寬提升至前所未有的水平,從而賦予機器人關節微秒級的轉矩響應能力 。
工業級SiC模塊的封裝演進
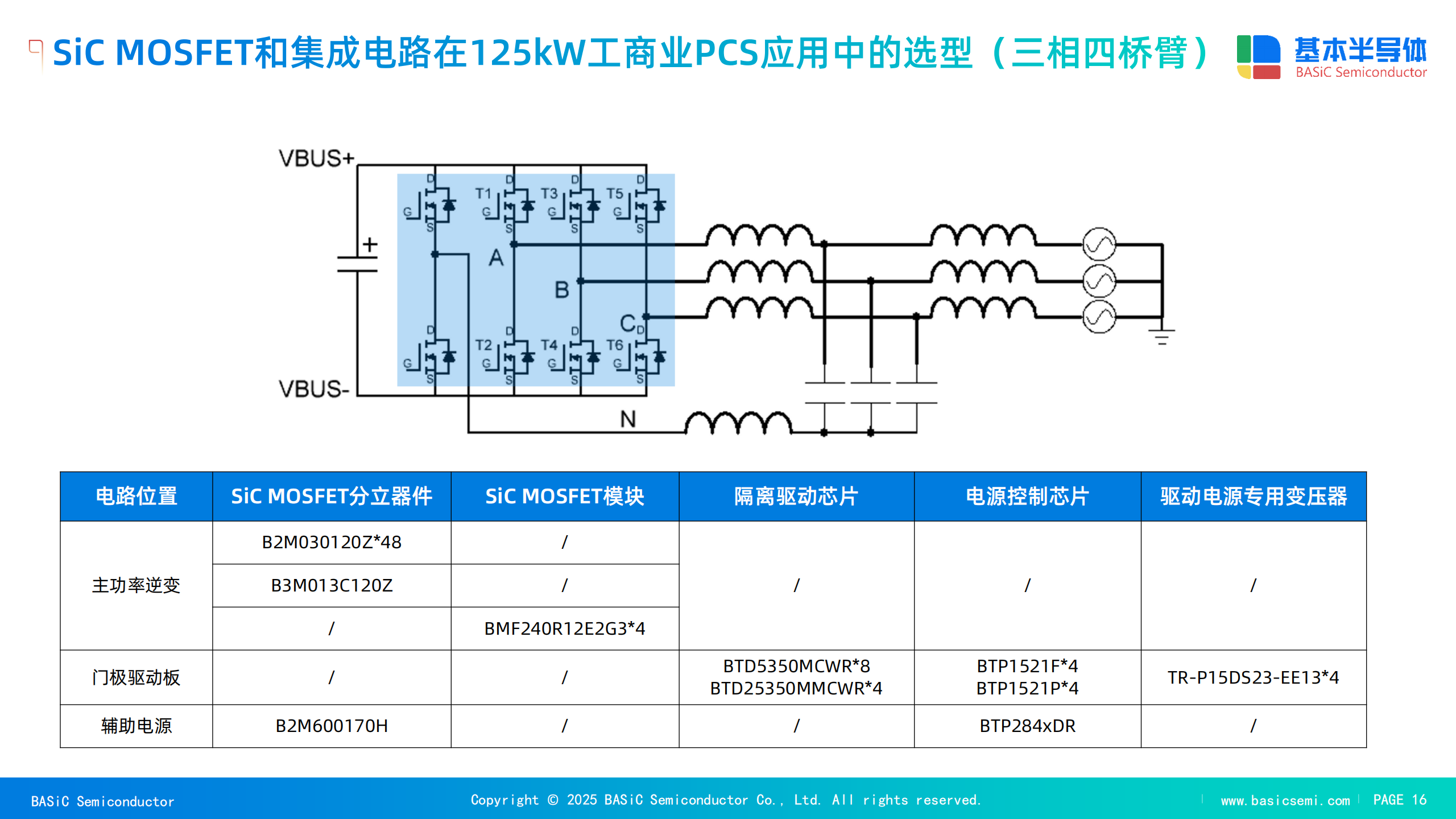
對于更大功率的關節驅動或多軸集中控制,基本半導體提供了高度集成的SiC MOSFET工業模塊,包括34mm(80A)、62mm(180A~540A)以及最新的Pcore?2 ED3(540A)等半橋模塊 。這些模塊引入了高性能的氮化硅(Si3?N4?)AMB陶瓷覆銅板。與傳統的氧化鋁(Al2?O3?)或氮化鋁(AlN)相比,氮化硅不僅具有優良的熱導率(90 W/mK),其抗彎強度(700 N/mm2)和斷裂韌性(6.0 MPa√m)更是遠超同類材料 。
在機器人關節頻繁啟動、急停和反轉的過程中,功率模塊會經歷劇烈的功率循環和熱沖擊。經過1000次熱沖擊測試,Al2?O3?或AlN基板極易在銅箔與陶瓷之間發生分層剝離,而Si3?N4?基板則能保持完美的結合強度 。這種卓越的封裝可靠性,配合銅底板結構的優化熱擴散,確保了無電容矩陣變換器在嚴苛工業環境下的長期穩定運行。
高頻動態響應的核心:四步換流策略
如前所述,矩陣變換器沒有直流母線電容作為緩沖,這意味著它必須同時滿足兩個在物理上相互沖突的換流法則:
輸入相絕不能短路:任何兩個輸入相若同時連接到同一個輸出相,將導致極低阻抗的相間短路,瞬間燒毀器件。
輸出電流絕不能中斷:機器人關節電機是高感性負載,強行切斷電感電流回路會引發巨大的反電動勢(L?di/dt),導致毀滅性的過壓擊穿 。
在傳統VSI逆變器中,通過設置簡單的“死區時間”(Dead-time)并依賴反并聯二極管續流即可解決此問題。但在直接矩陣變換器中,雙向開關沒有自然的續流路徑。為了在安全切換的同時避免短路和開路,業界開發了嚴密的四步換流策略(Four-step Commutation Strategy) 。四步換流可以基于輸出電流的方向或輸入電壓的極性進行邏輯判斷,其中基于電流方向的四步換流應用最為廣泛 。
電流型四步換流機制解析
假設負載電流方向為正(電流從變換器流向電機),系統需要將輸出相從輸入相A切換到輸入相B。相A的雙向開關由兩個反串聯的單向器件 SA,fwd?(正向導通)和 SA,rev?(反向阻斷)組成,相B同理。換流的嚴格步驟如下:
第一步(關斷非導通器件) :系統檢測到電流為正,因此相A中的 SA,rev? 目前未承載電流。首先關斷 SA,rev?。此時,相A僅允許正向電流通過,這為后續操作切斷了可能存在的反向短路路徑。
第二步(導通目標相的承載器件) :開啟輸入相B中負責正向導通的 SB,fwd?。由于 SA,rev? 已經關斷,相A和相B之間不會形成貫通短路。此時,根據相A和相B的電壓大小,負載電流開始發生自然換流(如果 VB?>VA?,電流轉移至相B;如果 VB?
第三步(關斷原始相的承載器件) :關斷相A中的 SA,fwd?。至此,相A被徹底斷開,所有電感負載電流被強行或完全轉移至相B的 SB,fwd? 中。
第四步(導通目標相的非承載器件) :開啟相B中的 SB,rev?。相B的雙向開關徹底進入全導通狀態,允許雙向功率流動和同步整流的進行。
死區時間優化與硬件實現
四步換流邏輯極其復雜,對于一個包含9個雙向開關的三相-三相矩陣變換器,總共需要控制18個獨立的IGBT或MOSFET柵極 。在早期的設計中,由于主控DSP負擔過重,四步換流邏輯通常必須交由獨立的復雜可編程邏輯器件(CPLD)或現場可編程邏輯門陣列(FPGA)來執行 。FPGA以25 MHz以上的高速時鐘運行,可以將每一步換流時間控制在160 ns左右,整個四步過程耗時僅640 ns 。
隨著技術的進步,2025年的最新研究表明,基于高性能微控制器(如德州儀器的 TMS320F28379D),可以通過深度配置其增強型脈寬調制(ePWM)外設功能模塊,在不增加額外CPLD/FPGA硬件的情況下,直接在MCU內部完成四步換流的算法實現 。這種硬件架構的精簡,得益于SiC MOSFET極高的開關速度。例如,基本半導體B3M系列器件的開通延遲時間(td(on)?)僅為 1526 ns,關斷延遲時間(td(off)?)僅為 70102 ns 。由于器件狀態切換極快且反向恢復電荷(Qrr?)接近于零,各換流步驟之間的安全時間裕度被大幅縮短,使得“無死區”或微死區的高質量波形輸出成為可能,徹底消除了傳統硅基器件由于長死區時間帶來的輸出電壓畸變和低頻諧波 。
高隔離度與高CMTI柵極驅動技術
SiC MOSFET矩陣變換器在顯著提升開關頻率和動態響應的同時,也給柵極驅動系統帶來了嚴峻的電磁兼容(EMC)與隔離挑戰。在雙向開關拓撲中,共源極連接點的電位(即驅動器的參考地)會隨著高頻開關動作,在不同的交流輸入相電壓和輸出相電壓之間劇烈跳變 。
在采用SiC技術的系統中,開關節點處的電壓變化率(dv/dt)通常超過 50 V/ns,在高度優化的回路中甚至可能達到 100 V/ns 以上。這種極端的 dv/dt 會通過隔離驅動器內部的寄生電容產生巨大的共模位移電流(I=C?dv/dt),如果驅動芯片的隔離屏障無法阻擋這種高頻共模瞬態噪聲,將會導致數字信號傳輸錯誤,引發誤導通、橋臂直通乃至系統爆炸 。
共模瞬態抗擾度(CMTI)的決定性作用
因此,對于SiC矩陣變換器的驅動系統而言,**共模瞬態抗擾度(CMTI)**成為了最關鍵的技術指標 。為確保在機器人高速運轉過程中的絕對安全,驅動器的CMTI通常要求大于 100 kV/μs,甚至達到 150 kV/μs 至 300 kV/μs 的級別 。
在這一領域,青銅劍技術(Bronze Technologies)提供了一系列專為碳化硅器件深度定制的驅動解決方案 。青銅劍的核心隔離驅動芯片(如BTD5350MCWR)及配套的隔離變壓器(如TR-P15DS23-EE13),專為應對高壓、高頻環境設計。這些驅動產品采用了先進的磁隔離或容性隔離技術,能夠提供高達 5000 Vrms 至 6000 Vrms 的絕緣耐壓,不僅滿足了極高的CMTI要求,還確保了在協作機器人環境中人機交互的電氣安全性 。
驅動電流與主動保護機制
SiC MOSFET的極速開關依賴于充沛的柵極驅動電流。以基本半導體 B3M011C120Z 為例,其輸入電容(Ciss?)高達 6000 pF 。為了在幾十納秒內完成對該電容的充放電(電壓擺幅通常從 -4V 到 +18V),需要極高的瞬態峰值電流。青銅劍技術的 2CP0220T12 等系列即插即用雙通道驅動器,單通道輸出功率達 2W,能夠直接輸出高達 ±20A(甚至部分型號達 ±25A)的峰值拉灌電流,無需外置推挽放大級,即可強力驅動并聯的SiC模塊 。
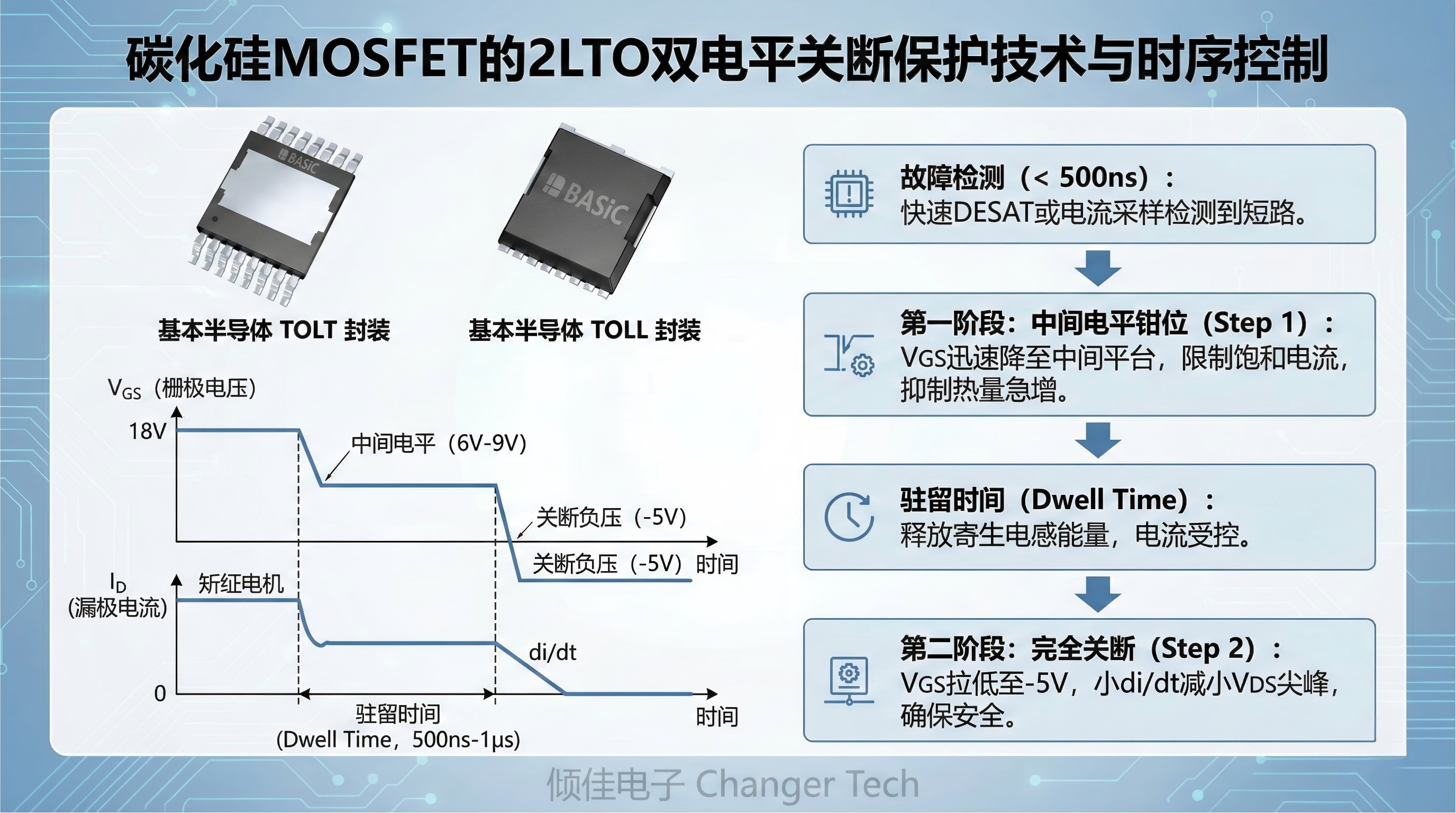
同時,完善的主動保護功能是矩陣變換器生存的最后一道防線。由于SiC MOSFET的芯片面積較小且電流密度極高,其短路耐受時間(SCWT)通常僅有 2~3 μs,遠低于傳統IGBT的 10 μs 。因此,驅動器必須集成超快速的退飽和(DESAT)檢測或 di/dt 保護功能。一旦檢測到短路,驅動器將執行**軟關斷(Soft Shutdown)**策略:通過緩慢降低柵極電壓來抑制因過快切斷短路電流而引發的致命 L?di/dt 電壓尖峰 。
此外,高 dv/dt 還極易通過米勒電容(Crss?)將關斷狀態下的MOSFET柵極電壓局部抬升,導致器件產生寄生導通(米勒效應)。為此,除了SiC器件本身通過優化設計提升 Ciss?/Crss? 比例外,先進的驅動芯片還內置了**有源米勒鉗位(Active Miller Clamp)**功能。在器件關斷后,驅動器通過一個低阻抗通路將柵極牢牢短接到負壓(如 -4V),徹底消除誤導通的風險,從而保障了矩陣變換器在四步換流期間的絕對安全 。
機器人關節伺服系統的實驗驗證與技術亮點
矩陣變換器與SiC功率器件深度賦能的理論優勢,在2025年的前沿機器人實驗中得到了驚艷的證實。研究人員將這種“無電容”的雙向開關驅動方案直接集成到了各類空間極其受限的機械臂關節中(例如7自由度的Kinova Gen3、UFactory xArm 5以及Franka Emika Panda機器人),并進行了廣泛的動態響應與能效測試 。
極高的動態響應與超低延遲
取消直流母線電容不僅壓縮了體積,更消除了傳統VSI系統中大電容充放電帶來的電壓慣性,使得電機定子電流能夠以極高的帶寬追蹤控制指令。在2025年的一項“虛實融合”控制策略實驗中,研究人員通過JSON協議在虛擬現實(VR)環境與物理機械臂之間同步數據 。
利用SiC矩陣變換器的高頻開關能力(數十kHz以上),控制系統實現了基于長短期記憶網絡(LSTM)的動作映射模型。實驗數據表明,該驅動方案實現了機械臂與人手動作之間僅 17毫秒(17ms) 的超低端到端延遲實時模仿 。這種極高的動態響應速度,是傳統的包含電解電容低頻濾波環節的逆變器所無法企及的,極大地提升了機器人應對突發外力擾動時的柔順控制(Compliance Control)能力。
能效優化與人機交互提升
矩陣變換器天生具備雙向功率流動能力(Bidirectional Power Flow),這使得機械臂在減速制動或受重力下降時,可以直接將多余的動能無縫回饋到交流電網中,而無需在傳統直流母線上增加耗能的制動電阻電路 。
2025年的系統級測試數據顯示,這種新型無電容驅動方案相較于傳統方法,使機器人路徑規劃的整體能耗降低了 28.4% 。此外,高頻、精確的四步換流有效消除了電流過零點的畸變,降低了電機運行時的轉矩脈動和機械振動。這使得機械臂的操作更加平滑靜音,從而將人機交互(HCI)效率提升了 43% 。
視覺與觸覺的高精度融合
在高精度操作方面,該系統在復雜的視覺引導和觸覺反饋任務中也表現出卓越性能。在集成Mask R-CNN深度學習算法和Intel? RealSense? D435深度相機的自動化抓取實驗中,基于SiC矩陣變換器的高頻微秒級電流響應,使得執行器(End-effector)的位置精度達到 0.05 mm(在1kg負載下)。系統整體實現了 98%的檢測與抓取準確率,最終的操作準確率達到 99% 。這種將智能視覺識別與底層極速電氣執行深度綁定的系統,為未來靈巧制造和高復雜度的手術機器人提供了堅實的技術路徑。
遠期展望與二次/三次推演洞察
SiC矩陣變換器在機器人關節中的成功應用,不僅僅是一個局部的電氣創新,它正在引發工業機器人和電力電子領域的深層鏈式反應。
從分立器件向單片雙向開關(M-BDS)的跨越
目前工業實現仍主要依賴將兩顆分立的SiC MOSFET芯片反向串聯來構建雙向開關。然而,研究軌跡的下一步明確指向了**單片雙向開關(Monolithic Bidirectional Switch, M-BDS)**或雙向場效應晶體管(BiDFET)的商業化 。M-BDS在同一片碳化硅晶圓上集成雙柵極結構,通過共享漂移區,能夠實現完整的四象限電壓阻斷與電流傳導。 由于消除了分立器件之間的鍵合線和冗余的襯底厚度,M-BDS將使雙向開關的導通電阻降低一半以上,并將寄生電感進一步壓縮至極限 。這將推動矩陣變換器的功率密度邁入被稱為“電力電子5.0”的新紀元,使得重載工業機器人的伺服驅動器完全隱形于機械結構之中。
邊緣計算與網絡安全的交匯
隨著驅動器體積的大幅縮小,先進的數字信號處理器(DSP)被直接下沉部署到每一個機器人關節中,負責處理高算力的空間矢量調制(SVM)和納秒級的四步換流邏輯。這些分布式的節點通過高速工業以太網(如EtherCAT)連接。 這種去中心化的網絡架構帶來了潛在的“第三階”影響:驅動級網絡安全(Cybersecurity) 。由于換流邏輯直接關系到硬件的物理安全,黑客若通過網絡滲透篡改矩陣變換器的四步換流序列時序,即可輕易引發相間短路,造成設備物理損毀。因此,未來的機器人驅動器不僅需要電氣隔離,更需在MCU層面集成硬件級的加密鎖和不可篡改的死區時序硬連線保護,這標志著網絡防御邊界已經從IT系統延伸到了最底層的功率半導體開關層面。
結論
傳統的“交-直-交”變頻架構因其中間直流電解電容的存在,已成為制約高端機器人關節伺服系統向微型化、高動態演進的絕對物理瓶頸。矩陣變換器(Matrix Converter)通過純半導體開關矩陣實現直接的AC-AC變換,從根本上消除了電容的限制,提供了完美的拓撲精簡方案。
然而,是碳化硅(SiC)技術的成熟真正喚醒了矩陣變換器的工業潛力。以基本半導體(BASiC Semiconductor)B3M系列為代表的先進SiC MOSFET,憑借其近乎為零的反向恢復電荷(Qrr?)、超低的導通電阻和卓越的高頻高壓特性,徹底解決了傳統硅基雙向開關換流損耗大、控制復雜的頑疾。在青銅劍(Bronze Technologies)等提供的高CMTI、高隔離度、集成米勒鉗位與軟關斷保護的先進柵極驅動技術的護航下,復雜且精密的四步換流策略得以在微控制器中完美、安全地高速執行。
多項前沿機器人實驗數據無可辯駁地證明了這一技術路徑的成功。這種“無電容”的SiC雙向開關驅動方案在物理空間極其受限的機械臂中,實現了17毫秒的超低運動映射延遲、降低了28.4%的系統能耗,并將人機交互效率提升了43%。展望未來,隨著單片雙向開關(M-BDS)的研發突破以及安全控制協議的深度融合,碳化硅矩陣變換器必將成為下一代高靈巧、高智能、高動態響應工業機器人的標準電氣基礎設施。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
SiC
+關注
關注
32文章
3720瀏覽量
69380 -
碳化硅
+關注
關注
26文章
3464瀏覽量
52327
發布評論請先 登錄
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
頂部散熱碳化硅 MOSFET 在重載人形機器人關節驅動中的技術與商業價值

LLC諧振變換器:物理本質、演進歷程與SiC碳化硅技術的深度融合

電力電子變換器中環流動力學:產生機理、利用策略與碳化硅(SiC) MOSFET技術的范式轉變

電解電源拓撲架構演進與碳化硅(SiC)功率系統的技術分析報告
人形機器人電機伺服驅動技術發展趨勢及碳化硅SiC MOSFET在其中的應用
高壓靜電除塵電源拓撲架構演進與碳化硅SiC模塊應用的技術變革
SiC碳化硅MOSFET功率半導體銷售培訓手冊:電源拓撲與解析

傾佳電子SiC碳化硅在微電網儲能領域的崛起:功率變換系統拓撲與技術趨勢的技術分析
基于SiC碳化硅功率模塊的高效、高可靠PCS解決方案

伺服系統和PLC各自在什么場合使用
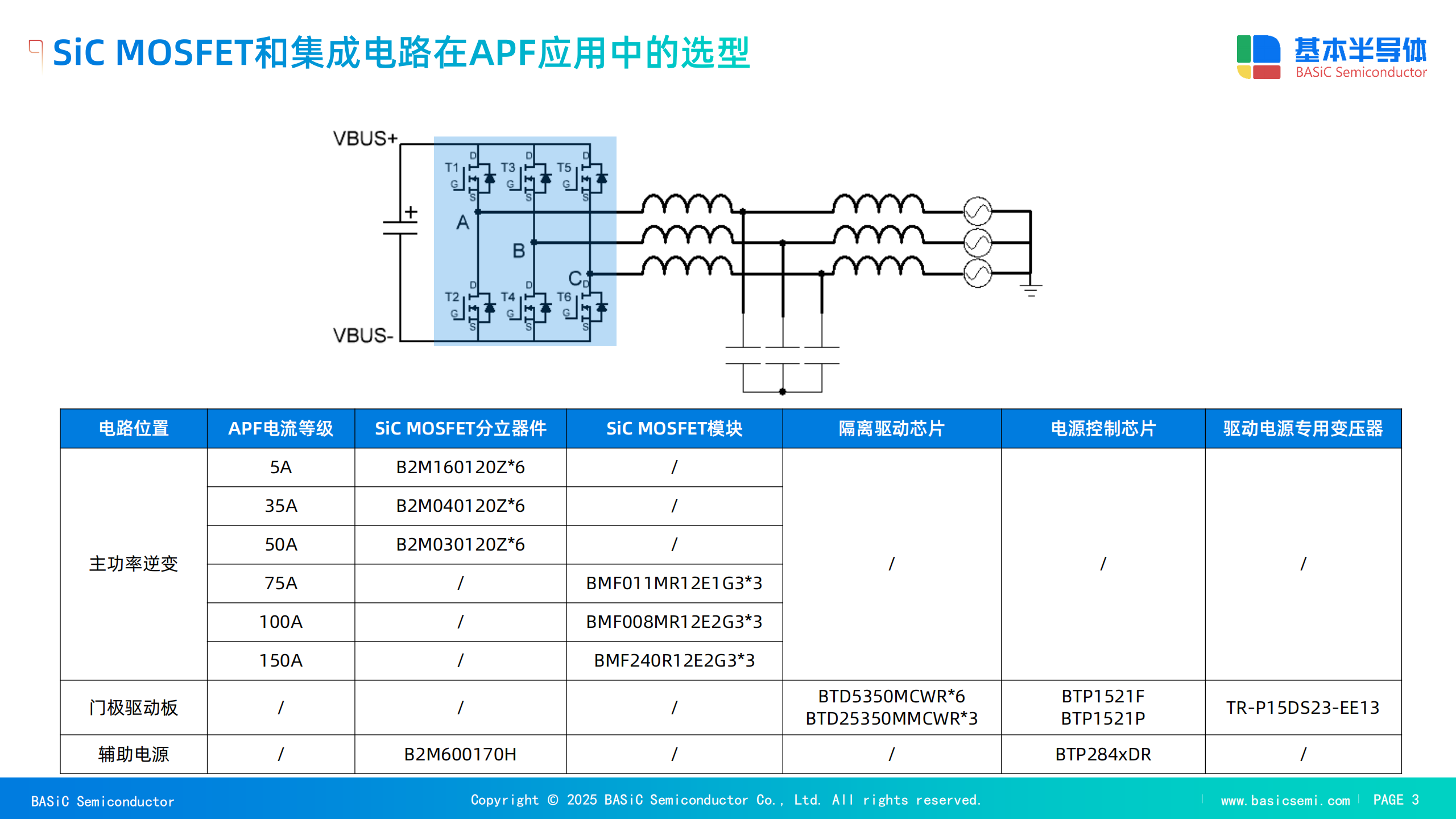
國產SiC碳化硅MOSFET在有源濾波器(APF)中的革新應用
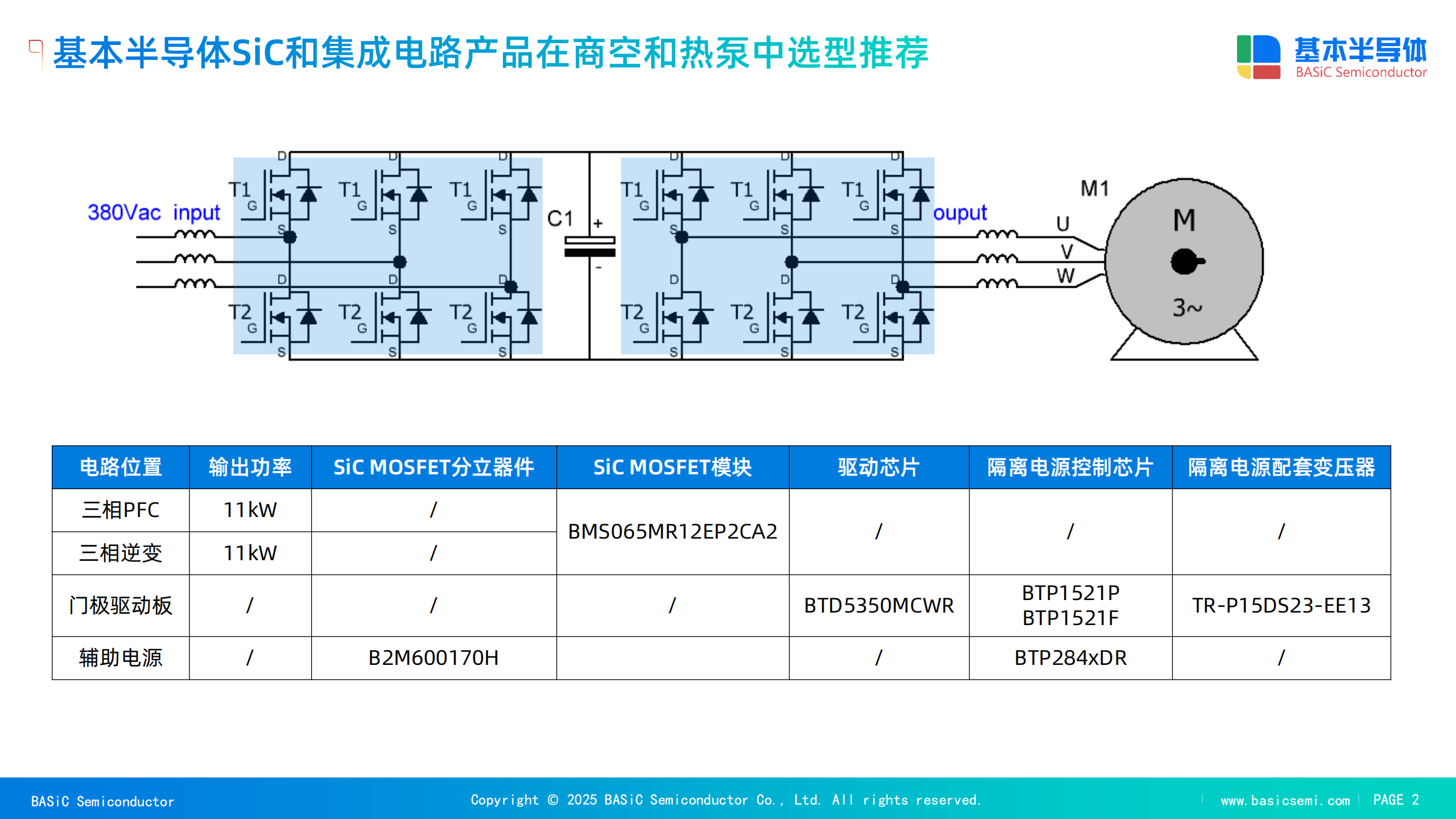
基于國產碳化硅SiC MOSFET的高效熱泵與商用空調系統解決方案
碳化硅何以英飛凌?—— SiC MOSFET性能評價的真相




 工商網監
工商網監
評論