 LDC5071-Q1 電感式位置傳感器前端:高精度與高適應性的完美結合
LDC5071-Q1 電感式位置傳感器前端:高精度與高適應性的完美結合

LDC5071-Q1 電感式位置傳感器前端:高精度與高適應性的完美結合
在汽車和工業應用中,精確測量絕對線性和旋轉位置至關重要。德州儀器(TI)的 LDC5071-Q1 電感式位置傳感器前端,憑借其卓越的特性和廣泛的應用場景,成為了工程師們的理想選擇。今天我們就來深入了解這款產品。
文件下載:ldc5071-q1.pdf
一、主要特性
1. 高可靠性與寬溫度范圍
LDC5071-Q1 通過了 AEC-Q100 認證,具備 0 級設備溫度等級,可在 -40°C 至 +160°C 的環境工作溫度下穩定運行。這使得它能夠適應各種惡劣環境,無論是寒冷的極地還是高溫的工業熔爐附近,都能可靠工作。
2. 高分辨率和高精度
在高達 480,000 RPM 的旋轉速度下,它能實現 ≤ 1 度的高分辨率和高精度。這意味著在高速旋轉的電機或設備中,也能精確測量其位置,為控制系統提供準確的數據。
3. 差分信號路徑與寬動態輸入范圍
支持正弦和余弦輸出的差分信號路徑,提供了寬動態輸入范圍。這使得傳感器能夠處理不同強度的信號,并且能夠抑制噪聲干擾,提高信號的質量。
4. 集成式設計與無磁要求
它是一款集成式模擬前端 IC,適用于無接觸式電感位置傳感器,可測量 0° 至 360° 的絕對旋轉位置。而且不需要磁鐵,這不僅簡化了設計,還降低了成本。
5. 強大的保護功能
具備逆電壓和過電壓保護功能,輸入電源和輸出引腳可承受 -15 V 至 30 V 的電壓范圍。同時,它對雜散磁場、灰塵和污染物具有免疫力,能夠在惡劣的工業環境中穩定運行。
6. 多電源選項與低功耗
支持 5 V 和 3.3 V 兩種輸入電源工作模式,可根據不同的設計需求進行選擇。最大工作電流僅為 22 mA,功耗較低,有助于降低系統的整體功耗。
二、應用領域
1. 汽車行業
- EV/HEV 牽引電機逆變器:精確測量電機的位置,為逆變器提供準確的控制信號,提高電機的效率和性能。
- 電動助力轉向:實時監測轉向角度,為駕駛員提供精確的轉向助力,增強駕駛的安全性和舒適性。
- 制動助力電機:確保制動系統的精確控制,提高制動的響應速度和可靠性。
- 換擋系統:精確檢測換擋位置,實現順暢的換擋操作。
- 集成式啟動發電機:監測發電機的位置和狀態,優化發電效率。
- 踏板位置:準確測量踏板的位置,為發動機控制系統提供精確的信號。
- 閥門和執行器:控制閥門和執行器的位置,實現精確的流量和壓力控制。
2. 工業領域
- 機器人:精確測量機器人關節的位置,實現機器人的精確運動控制。
- 電動自行車:監測電機的位置和速度,提供高效的動力輸出。
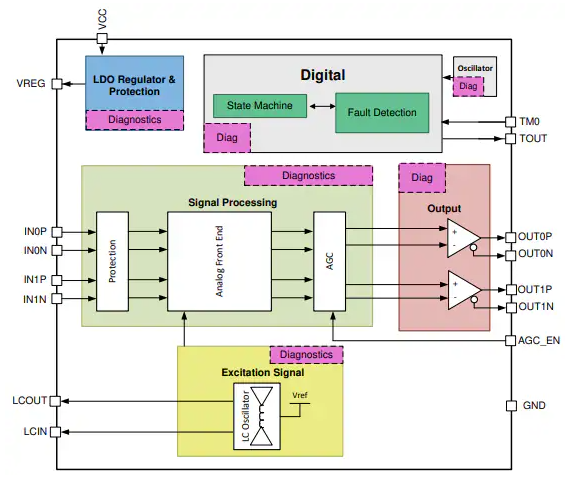
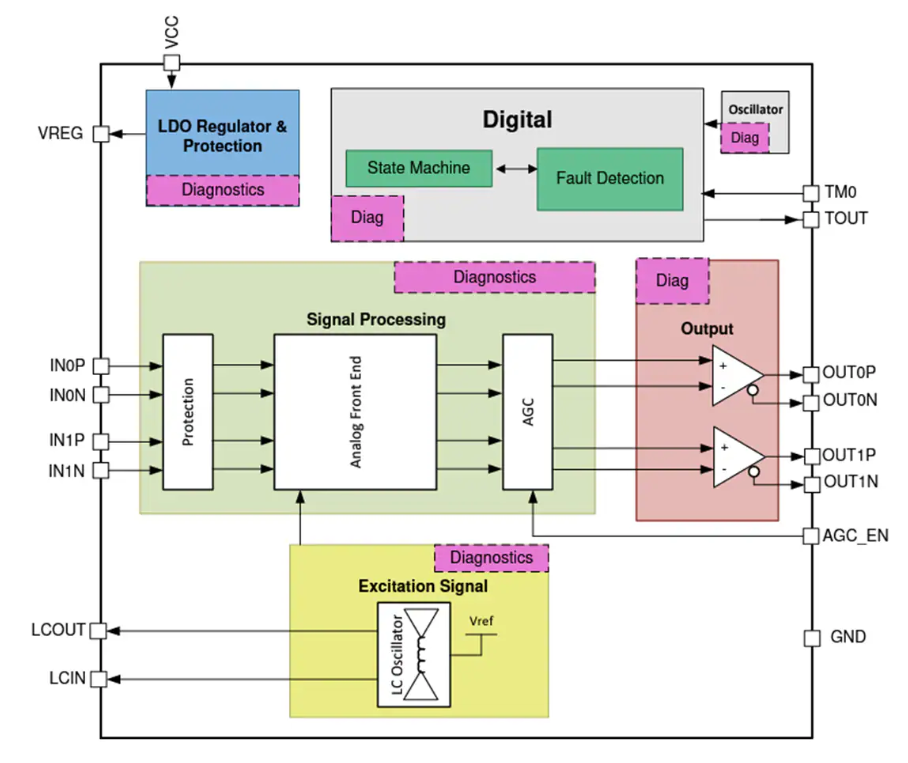
三、工作原理
LDC5071-Q1 通常與三個電感式感應線圈連接,其中一個線圈作為發射器,另外兩個作為接收器。發射器線圈在接收器線圈中感應出電壓,該電壓是傳感器線圈上方導電目標位置的函數。在工作過程中,LDC5071-Q1 對信號進行解調,并通過差分信號路徑提供正弦和余弦輸出。這些輸出信號可以連接到微控制器,用于計算旋轉角度。
四、電氣特性與參數
1. 絕對最大額定值
輸入電源電壓范圍為 -15 V 至 30 V,輸出引腳電壓范圍同樣為 -15 V 至 30 V,能夠承受較高的電壓沖擊。
2. ESD 評級
所有引腳的人體模型(HBM)ESD 評級為 ±2000 V,部分引腳可達 ±4000 V,具有較好的靜電防護能力。
3. 推薦工作條件
在 5 V 輸入模式下,VCC 輸入電壓范圍為 4.5 V 至 5.6 V;在 3.3 V 輸入模式下,VCC 和 VREG 輸入電壓范圍為 3.15 V 至 3.6 V。
4. 熱信息
結到環境的熱阻為 93.2 °C/W,結到外殼(頂部)的熱阻為 24.1 °C/W,熱性能良好,能夠有效散熱。
5. 電氣特性
- 信號路徑:積分非線性誤差(Err INL)最大為 2.5%,傳播延遲在不同條件下有明確的參數范圍,確保信號處理的準確性和及時性。
- 激勵:LC 振蕩器的差分幅度和直流工作點在不同溫度和電壓條件下都有相應的參數,能夠穩定地激勵傳感器線圈。
- 接收器:允許的差分輸入信號幅度范圍為 5 mVp-p 至 400 mVp-p,能夠處理不同強度的信號。
- 自動增益控制:通過 AGC_EN 引腳可以設置自動增益控制或手動增益控制,確保輸出信號在合適的范圍內。
- 輸出級:輸出信號范圍為 7% 至 93%VCC,能夠驅動較大范圍的容性負載。
五、設計與應用注意事項
1. 電源供應
有兩種工作模式可供選擇:
- 模式 1:VCC = 5V,VREG = 3.3V。此時,VCC 需外部 5V 電源供電,LDC5071-Q1 內部 LDO 生成 3.3V 給 VREG。VCC 需 4.5V 至 5.6V 之間,且至少 100nF 去耦電容;VREG 電容在 CEXT_VREG 參數范圍內。
- 模式 2:VCC = VREG = 3.3V。VCC 和 VREG 由同一 3.3V 電源供電,二者一起至少需要 100nF 去耦電容。但此模式下電源軌不能承受短路到高電壓源,如汽車電池。
2. 輸出電容選擇
輸出電容的選擇取決于電機的最大速度和電感式傳感器的極數。根據計算得出的 LDC5071-Q1 最大速度,參考典型特性圖表來選擇合適的輸出電容,以確保系統的穩定性和性能。
3. 增益控制模式
- 自動增益控制(AGC)模式:適用于傳感器和目標之間的安裝距離存在變化的情況,能夠自動調整信號路徑增益,補償傳感器的變化。
- 固定增益模式:當輸入信號的幅度變化較小且氣隙控制良好時,可以使用固定增益模式。這種模式下,主機 MCU 可以測量輸出信號的幅度變化,從而獲取氣隙變化的信息。但需要注意信號過大可能導致飽和,信號過小可能導致信噪比降低。
4. PCB 布局
- 至少使用 2 層 PCB。將旁路電容靠近設備引腳放置,以減少噪聲干擾。
- 在 LDC5071-Q1 下方設置接地平面層,但傳感器線圈下方盡量不要有接地層,以免影響傳感器響應。可使用屏蔽層保護傳感器免受金屬或 EMI 干擾,但要與傳感器底部保持足夠距離。
- 盡量縮短 LDC5071-Q1 與傳感器線圈之間的 LCIN、LCOUT 和 INX 信號走線長度,以減少信號損耗和干擾。
- 在布局中預留 RINFLT、CFLT、L1、L2、L3 和 L4 的占位焊盤,便于在 EMI/EMC 測試時進行調試。
六、總結
LDC5071-Q1 電感式位置傳感器前端以其高可靠性、高精度、寬溫度范圍、多電源選項和強大的保護功能,在汽車和工業應用中具有廣泛的應用前景。通過合理的設計和布局,可以充分發揮其性能優勢,為各種系統提供精確的位置測量解決方案。在實際應用中,工程師們可以根據具體的需求和條件,選擇合適的工作模式和參數,確保系統的穩定性和可靠性。大家在使用過程中有遇到什么問題或者有什么獨特的經驗,歡迎在評論區分享交流。
發布評論請先 登錄
電感式傳感:線性位置傳感(第2部分)
電感式傳感:線性位置傳感(第1部分)
低成本ESI和LDC電感式線性位置傳感解決方案
電感式位置傳感器ZMID5202應用設計
LDC5071-Q1具有Sin/Cos接口的電感式位置傳感器前端數據表

LDC5072-Q1具有Sin/Cos接口的電感式位置傳感器前端數據表
德州儀器LDC5071-Q1電感式位置傳感器技術解析
LDC5072-Q1電感式位置傳感器前端芯片技術解析與應用指南



 工商網監
工商網監
評論