") 調試PID常用口訣分析
調試PID常用口訣分析

在工業(yè)控制領域,PID(比例-積分-微分)控制是最經典的控制算法之一,廣泛應用于溫度、壓力、流量等過程控制系統中。雖然現代控制理論發(fā)展迅速,但PID控制因其結構簡單、魯棒性好、易于實現等優(yōu)點,仍然是工程實踐中的首選方案。對于工程師而言,掌握PID參數的調試方法是必備技能。本文將圍繞"調試PID常用口訣"展開深入分析,結合工程實踐經驗,為讀者提供一套系統化的PID參數整定方法論。 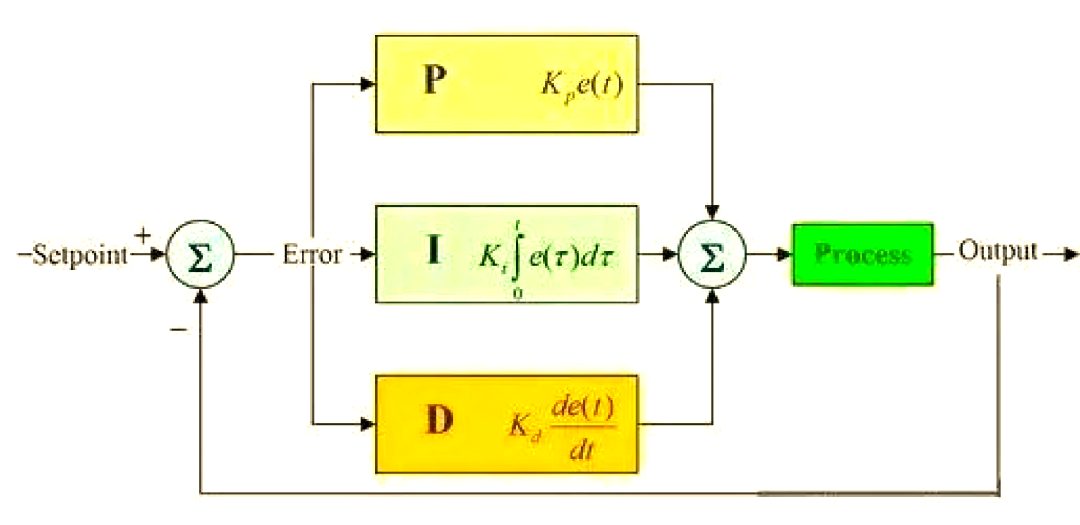
一、PID控制基本原理回顧
PID控制器由比例(P)、積分(I)和微分(D)三個環(huán)節(jié)組成,每個環(huán)節(jié)都有其獨特的物理意義和控制作用。比例環(huán)節(jié)反映當前誤差,決定系統的響應速度;積分環(huán)節(jié)消除穩(wěn)態(tài)誤差,提高控制精度;微分環(huán)節(jié)預測誤差變化趨勢,抑制超調。三者協同工作,共同實現對被控對象的精準控制。理解這三個參數的本質作用,是進行參數調試的基礎。在實際工程中,90%以上的控制系統采用PI或PID控制,僅有約5%的場合需要更復雜的控制策略,這充分說明了PID控制在工業(yè)應用中的主導地位。
二、經典PID調試口訣解析
工程實踐中流傳著許多PID調試口訣,這些口訣凝聚了前輩工程師的智慧結晶。最著名的當屬"先比例后積分,最后再加微分"的調試順序,這一原則的科學性在于:比例控制是系統穩(wěn)定的基礎,只有在比例控制使系統基本穩(wěn)定后,加入積分作用消除靜差才有意義;而微分作用通常最后加入,以避免對測量噪聲過于敏感。另一個廣為流傳的口訣是"曲線震蕩很頻繁,比例度盤要放大;曲線漂浮繞大彎,比例度盤往小扳",這形象地描述了比例系數對系統響應的影響——比例系數過大導致振蕩,過小則響應遲緩。 "曲線偏離回復慢,積分時間再減小;曲線波動周期長,積分時間再加長"則精準概括了積分時間的調整規(guī)律。積分作用太強(積分時間太小)會引起系統振蕩,太弱則無法快速消除靜差。對于微分作用的調節(jié),"動差大來波動慢,微分時間應加長"給出了明確指導,微分時間的選擇應與過程的主要時間常數相當,才能有效抑制超調。
三、PID參數整定的工程實踐方法
除了口訣式的經驗法則,工程上還有幾種系統化的PID整定方法。Ziegler-Nichols法是其中最著名的一種,它通過臨界比例度法和階躍響應法兩種方式,為PID參數提供初始設定值。臨界比例度法通過逐漸增大比例系數直至系統出現等幅振蕩,然后根據臨界增益和振蕩周期計算PID參數;階躍響應法則根據系統的階躍響應曲線特征參數來確定PID參數。這兩種方法各有優(yōu)缺點:臨界比例度法需要使系統處于臨界振蕩狀態(tài),在某些不允許振蕩的場合不適用;階躍響應法則需要獲取系統的開環(huán)響應曲線。 Cohen-Coon法是基于過程模型的另一種整定方法,它針對一階加純滯后系統提出了參數計算公式。與Ziegler-Nichols法相比,Cohen-Coon法通常能得到更快的響應速度,但超調量可能稍大。近年來發(fā)展起來的內模控制(IMC)整定法,通過引入濾波器時間常數這個調節(jié)參數,可以在響應速度和魯棒性之間取得更好的平衡。
四、PID調試中的常見問題與解決方案
在實際調試過程中,工程師常會遇到各種典型問題。對于系統出現持續(xù)振蕩的情況,首先應該檢查是否是積分作用過強導致的,可以適當增大積分時間;如果是比例系數過大引起的,則需要減小比例增益。當系統響應過于遲緩時,可能需要同時增大比例增益和減小積分時間。 測量噪聲是影響PID性能的另一重要因素,特別是對微分環(huán)節(jié)影響顯著。解決方法包括:在微分環(huán)節(jié)前加入低通濾波器;使用不完全微分形式的PID算法;或者在某些噪聲特別大的場合,干脆不使用微分作用。對于存在顯著滯后的系統,單純PID控制可能效果不佳,這時可以考慮采用Smith預估補償等先進控制策略。
五、現代PID調試技術發(fā)展
隨著計算機技術的發(fā)展,PID調試方法也在不斷創(chuàng)新。自整定PID技術已經廣泛應用于現代控制系統中,它通過自動進行階躍測試或閉環(huán)測試,計算出合適的PID參數。模糊PID控制將模糊邏輯與傳統PID結合,能夠適應更復雜的工況變化。自適應PID則能在線調整參數,應對時變系統的控制需求。 近年來興起的基于數據的PID整定方法,如強化學習等人工智能技術,為PID調試開辟了新途徑。這些方法不需要精確的過程模型,而是通過大量數據訓練來優(yōu)化控制性能。雖然這些先進技術在某些領域取得了成功,但傳統的PID調試口訣和經驗法則仍然是工程師快速解決問題的重要工具。
六、PID調試的實踐建議
基于多年的工程實踐,我們總結出以下幾點PID調試建議:首先,調試前務必了解工藝要求和設備特性,明確控制指標;其次,安全第一,參數調整應該從小往大逐步試探;再次,記錄每次參數修改后的響應曲線,通過對比分析找出最佳參數;最后,考慮環(huán)境因素變化對系統的影響,留出適當的魯棒裕度。 對于初學者而言,掌握PID調試既需要理解控制理論,更需要積累實踐經驗。建議從仿真開始練習,熟悉各種典型過程(如一階慣性、二階振蕩、純滯后等)的PID整定特點,然后再到現場進行實際調試。記住,好的PID調試工程師不是靠記住口訣就能成就的,而是需要將理論、經驗和創(chuàng)新思維有機結合。 隨著工業(yè)4.0和智能制造的推進,PID控制技術也在與時俱進。但無論技術如何發(fā)展,理解PID控制的核心原理,掌握參數調試的基本方法,始終是控制工程師的看家本領。希望本文對PID調試口訣的系統分析,能夠幫助讀者在工程實踐中更高效地完成控制系統的調試工作。
審核編輯 黃宇
-
PID
+關注
關注
38文章
1499瀏覽量
91172
發(fā)布評論請先 登錄
變頻器pid怎么啟用

PID控制的算法
C語言的PID算法
C語言增量式PID的通用算法
怎樣理解變頻器內置PID控制參數的含義
CW32電機控制基礎——PID控制原理
SEGGER Ozone調試器支持第三方調試工具
調試工具:Eclipse調試工具欄與窗口的深入分析
PID串級控制在同步發(fā)電機勵磁控制中的應用
掃描電機的PID恒速控制仿真及實驗
硬件調試:JLink 驅動配置與調試技巧
EMC 設計避坑指南:四不口訣

八芯網線水晶頭口訣法
哪位大神會boost電路pid仿真?我有個小問題不太懂
前端調試實踐



 工商網監(jiān)
工商網監(jiān)
評論