 車路協同真正難的,不是雷達,而是路側網絡
車路協同真正難的,不是雷達,而是路側網絡

在很多關于車路協同(V2I)的討論中,大家往往更關注激光雷達、攝像頭、5G、自動駕駛算法,卻很少有人認真聊一聊:
這些設備采集到的數據,是如何在一個十字路口真正“協同”起來的?
實際上,真正決定車路協同系統穩定性和可擴展性的,往往是隱藏在路邊機箱里的那一套路側網絡。
一個真實的智慧路口,會發生什么?
在典型的城市十字路口,車路協同系統通常會部署多種感知設備:
目前,像速騰聚創、禾賽智能、圖達通等廠商的激光雷達,已經被廣泛應用在路側協同感知場景中。
問題在于:
這些設備不是“輪流工作”,而是同時、持續地產生大量數據。
高清視頻流、雷達目標數據、點云信息,會在同一時間涌向路側系統,對網絡提出了非常現實的挑戰。
路邊機箱,其實是整個系統的“中樞”
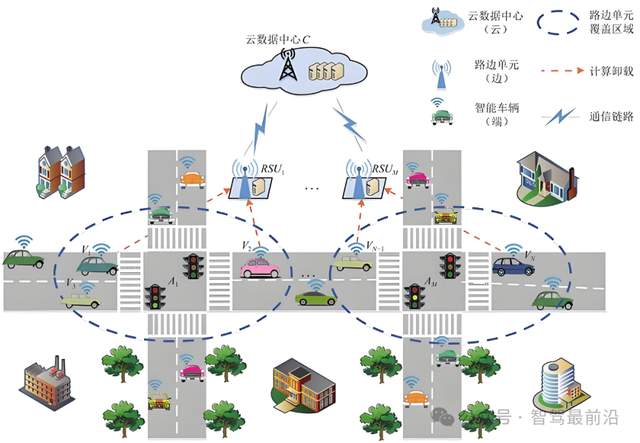
在工程部署中,這些感知設備通常會通過以太網接入到路邊機箱。 很多人以為機箱只是“裝設備的”,但在車路協同里,它更像是一個微型數據中心。

如上圖,在你看到的十字路口部署示意中:
- 攝像頭、激光雷達、毫米波雷達
- 統一接入機箱內的工業以太網交換機
- 再與邊緣計算節點(MEC)相連
所有感知數據,都會在這里完成匯聚、交換與轉發,隨后送入邊緣計算節點進行融合分析,生成交通事件、風險預警或協同感知結果。
這一步,決定了數據能否“來得及用”。
真正難的是:這些數據必須“同時發生”
在多傳感器協同感知中,有一個常被忽視的問題——時間同步。
舉個簡單的例子:
如果攝像頭和激光雷達看到的是“同一輛車”,但時間戳相差幾十毫秒,那么在系統里,它們可能就不再是“同一個目標”。
這會直接影響:
- 多源數據融合精度
- 目標軌跡判斷
- 碰撞預警和協同決策的可靠性
因此,越來越多的車路協同項目,開始在路側網絡中引入 PTP(IEEE 1588v2)高精度對時機制,讓所有感知設備和邊緣節點,工作在同一個時間基準之下。
路側網絡,對交換機提出了新要求
在這種場景下,普通網絡設備已經很難勝任。
一臺合格的路側核心交換機,至少需要具備:
- 穩定承載多路高清視頻與雷達數據的能力
- 支持 PTP 高精度時間同步
- 具備網絡冗余與快速自愈能力
- 能在高低溫、戶外環境下長期穩定運行
這也是工業級PTP交換機,開始在車路協同項目中被頻繁采用的原因。
FR-PTP3412 在路口中扮演的角色
以光路科技(Fiberroad)的 FR-PTP3412 工業PTP交換機為例,該設備在車路協同路口中,通常被部署在路邊機箱內,作為核心數據交換節點。

它一方面負責攝像頭、激光雷達、毫米波雷達等設備的數據匯聚與轉發;
另一方面,通過 PTP 對時機制,為整個路側系統提供統一、穩定的時間基準。
在多感知并行、數據實時融合的場景下,這類設備往往決定了系統是否“跑得穩、跑得久”。
寫在最后
車路協同的價值,不只是把車和路“連起來”,而是讓所有參與者在同一時間、同一認知下協同工作。
而在這一過程中,那些隱藏在路邊機箱里的網絡設備,正在悄然成為智慧交通系統中最關鍵、卻最容易被忽略的一環。
-
交換機
+關注
關注
23文章
2920瀏覽量
104639 -
PTP
+關注
關注
0文章
98瀏覽量
9793 -
車路協同
+關注
關注
1文章
65瀏覽量
4433
發布評論請先 登錄
NineData 新增支持 MySQL 到 openGauss PostgreSQL 數據復制鏈路

路虎鹽霧試驗是什么

微電網核心構成要素解析:從電源到負荷的全鏈路梳理

隼眼科技獲評車路協同智慧交通感知南京市工程技術中心
才茂通信工業路由器助力無人駕駛全場景落地應用
海康威視推出92-94GHz路側毫米波雷達和雷視新品
全鏈路協同!艾為電子開啟端側AI音頻“精而優”時代

資源狀態感知是如何實現對網絡鏈路狀態的實時感知的?
車路協同為什么被提得越來越少了?
廣汽集團參與車路云一體化中外車企協同開發測試
兆越通訊車路協同路側單元解決方案,賦能智慧交通新基建

車路協同系統時間同步那些事兒
你失去工作不是因為AI,而是因為使用AI的人
自動駕駛車路云協同,一邊降溫,一邊火熱?




 工商網監
工商網監
評論