 友思特產品 | ZED SDK 5.1 全新發布:助力機器人多相機感知技術再攀新峰
友思特產品 | ZED SDK 5.1 全新發布:助力機器人多相機感知技術再攀新峰

導語
友思特合作伙伴StereolabsZED SDK 5.1突破機器人平臺實時多相機感知技術極限,全新重構采集與錄制管道,升級增強型位姿追蹤功能,新增近距深度感知能力,且官方原生支持 Jetson Thor 平臺。本次版本迭代讓 ZED 全生態體系,在工業場景中運行更高速、更穩定、更全能。
全新升級亮點
1. 為機器人場景重構高性能采集系統
圖像采集系統完成全新重構,全面支持實時低延遲多相機系統。ZED SDK 5.1 全新采集架構,在采集、錄制、流媒體傳輸過程中,實現性能、可靠性雙提升,延遲進一步降低。
在 Jetson 嵌入式設備上,流傳輸延遲現已低至100 毫秒以內,為自主控制系統與遠程操控打造更流暢的反饋閉環。錄制負載亦大幅優化,SVO2 錄制模式的系統資源占用更少,長時連續錄制的穩定性顯著增強。
 NVIDIA Jetson AGX Thor 開發套件和 ZED 2i
NVIDIA Jetson AGX Thor 開發套件和 ZED 2i
基于 ZED Driver 1.3.1 版本,我們新增PREEMPT_RT 實時搶占內核模式支持,為高時效性關鍵應用提供更強的操控性與低延遲響應能力,適配全系列 ZED Box、ZED Box Mini 及 NVIDIA AGX Orin 開發套件。
2. 原生支持 Jetson Thor 平臺
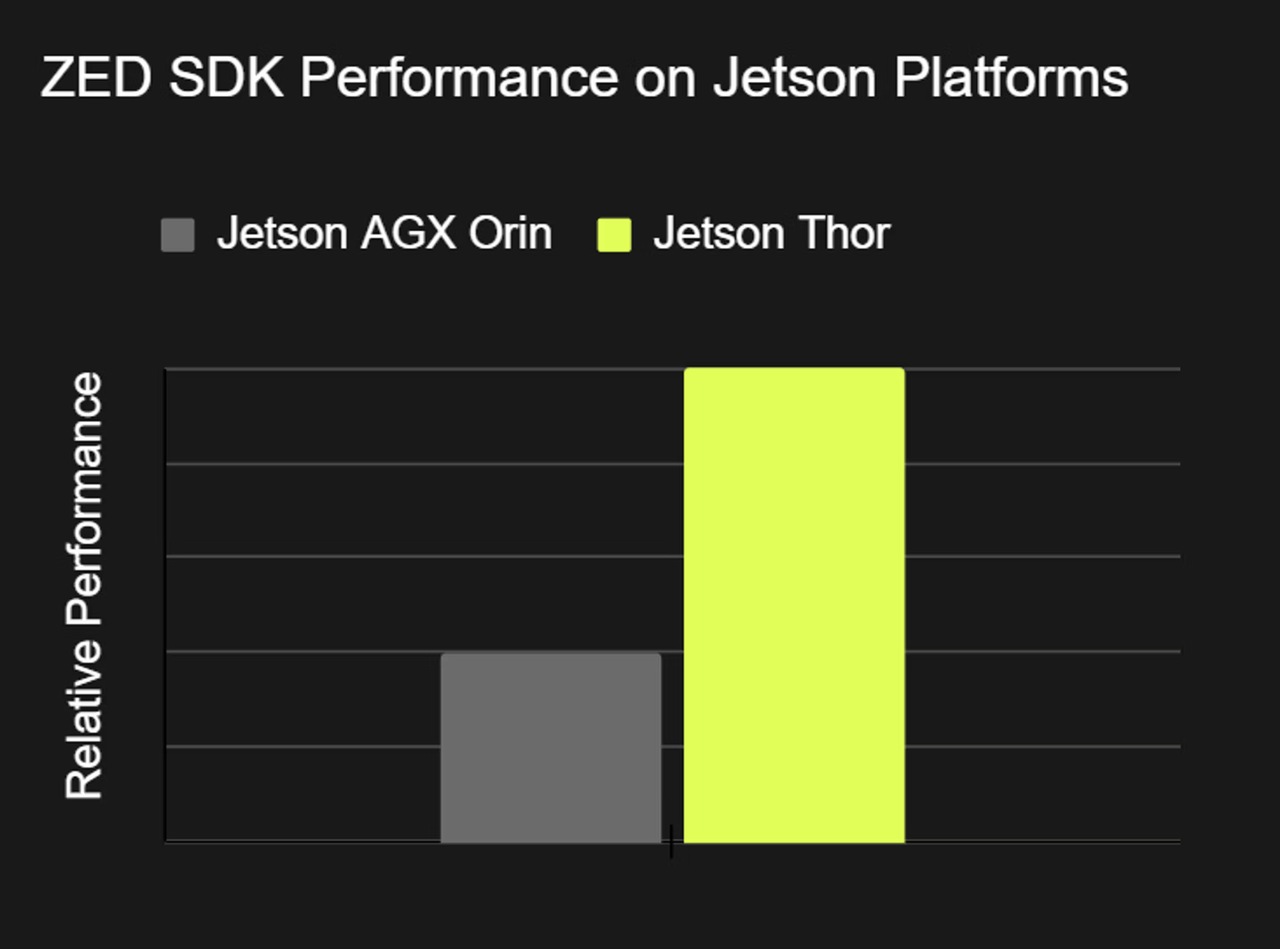 ZED SDK 性能
ZED SDK 性能
ZED SDK 5.1 同步適配英偉達全新嵌入式平臺 Jetson Thor,兼容 JetPack 7 開發套件,并搭載基于 Ubuntu 24.04 系統的全新板級支持包(BSP)。ZED 相機可充分發揮 Thor 的算力優勢,性能提升最高達 2.5 倍,賦能邊緣端實現更豐富的感知能力(硬件編解碼功能將隨后續 JetPack 版本更新正式上線)。
3. ZED Studio 全新登場:單應用集成,無限相機掌控
多相機感知已成為新一代機器人技術的標配方案。全新打造的 ZED Studio 工具,將所有相機、流傳輸及 SVO 文件管理功能,一站式整合至單款一體化應用中。
 全新 ZED Studio 多相機SDK
全新 ZED Studio 多相機SDK
可同時查看并操控多臺相機,錄制同步數據流,并按需自定義布局,統籌回放內容與實時畫面。
ZED Studio 核心功能支持:
?多相機實時可視化與同步錄制
?同步回放及流傳輸管理
?相機參數群組統一管控
?自動化命令行啟動配置
Windows 系統下,ZED Studio 已替代舊版查看器,成為打開 SVO 文件的默認應用程序 —— 為 ZED 生態管理打造統一跨平臺操作界面,體驗更一致。
4. Isaac? ROS 集成:ROS 2 實時性能全面加速
ZED ROS 2 封裝包完成重磅更新,實現與英偉達 ?Isaac? ROS 框架無縫集成,助力開發者充分利用英偉達 GPU 算力,高效完成實時感知及計算機視覺任務。
依托 NITROS(英偉達 ?Isaac? ROS 傳輸協議),相較傳統 CPU 傳輸方案,該封裝包的圖像話題發布延遲降低高達 90%。這一性能躍升源于 GPU 內存共享機制,可徹底消除 CPU 與 GPU 之間高損耗的數據拷貝環節。
最終實現:數據流傳輸提速、CPU/GPU 算力負載降低,為高負載機器人及 AI 應用,打造更流暢、更高效的 ROS 2 處理管道。
5. 近距深度感知能力重磅升級
全新升級的深度模塊,實現厘米級近距感知精度,成為操作、裝配、檢測類機器人的核心技術突破。即便目標物體僅距相機數厘米,也能輸出穩定無偽影的深度數據 — 完美適配機械臂、人形機器人、夾爪、末端執行器及近場場景重建等應用場景。
近場場景下的自校準能力同步優化,對復雜工況的適配性大幅提升,可自動診斷并修正相機潛在標定偏差,保障設備7×24 小時穩定可靠運行。
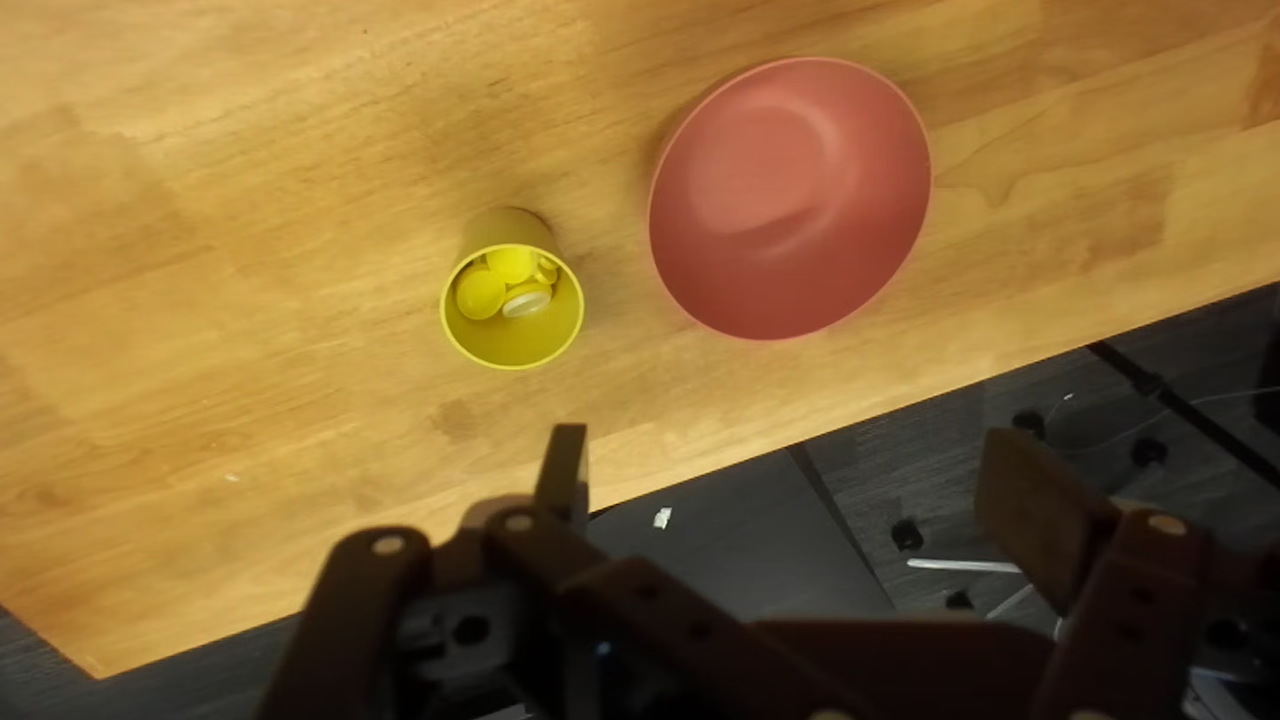 RGB 圖像(DROID 數據集)
RGB 圖像(DROID 數據集) 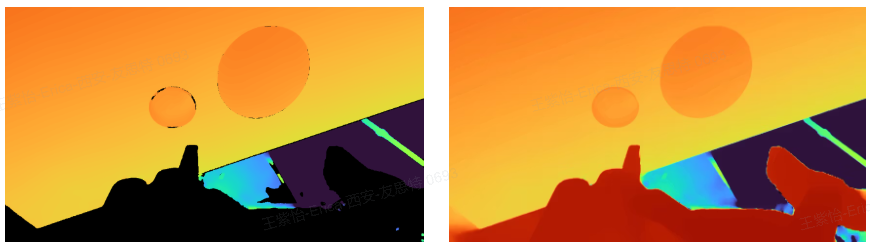 ZED SDK 5.0 版深度圖 ?VS ZED SDK 5.1 版深度圖
ZED SDK 5.0 版深度圖 ?VS ZED SDK 5.1 版深度圖
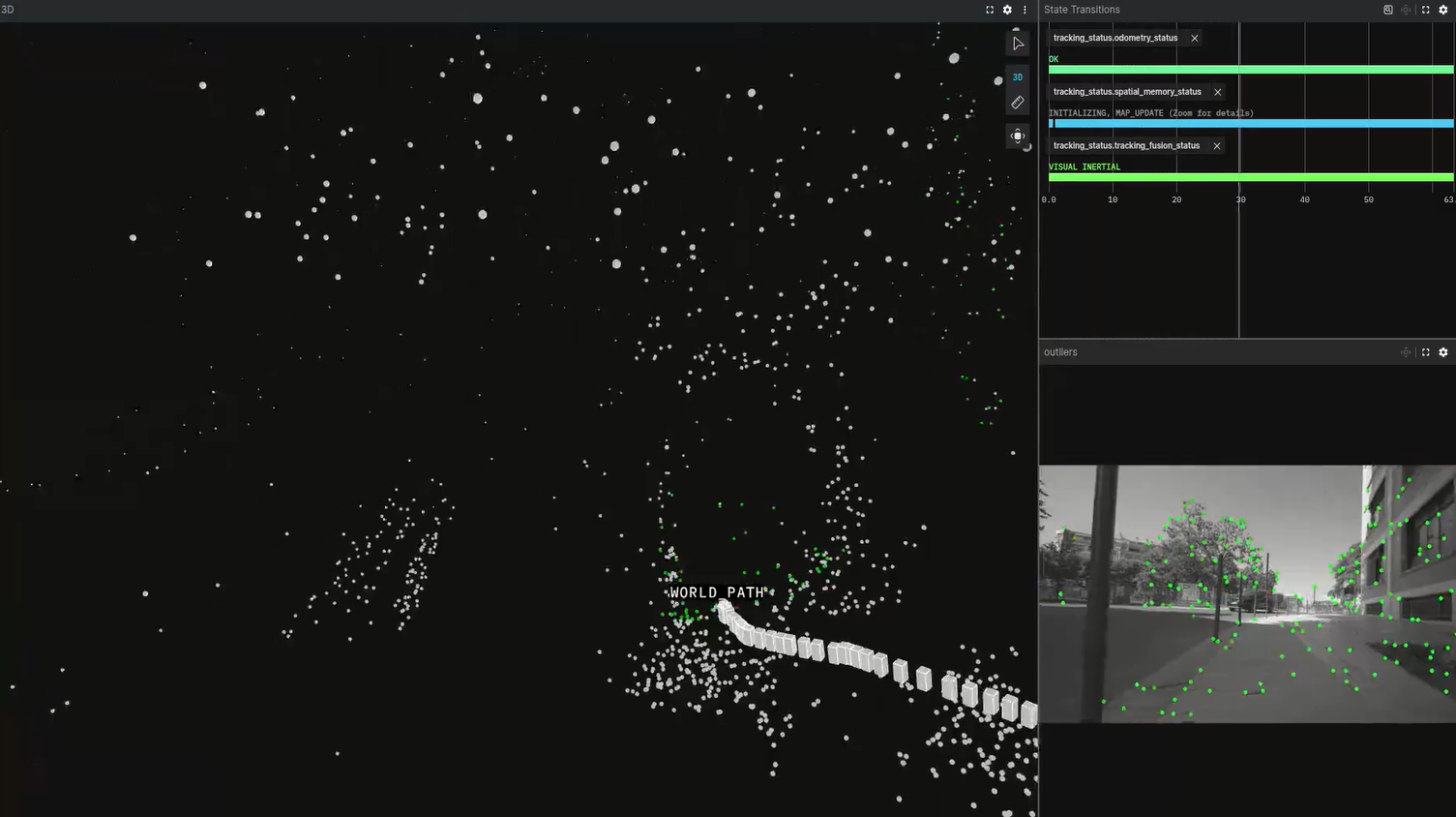
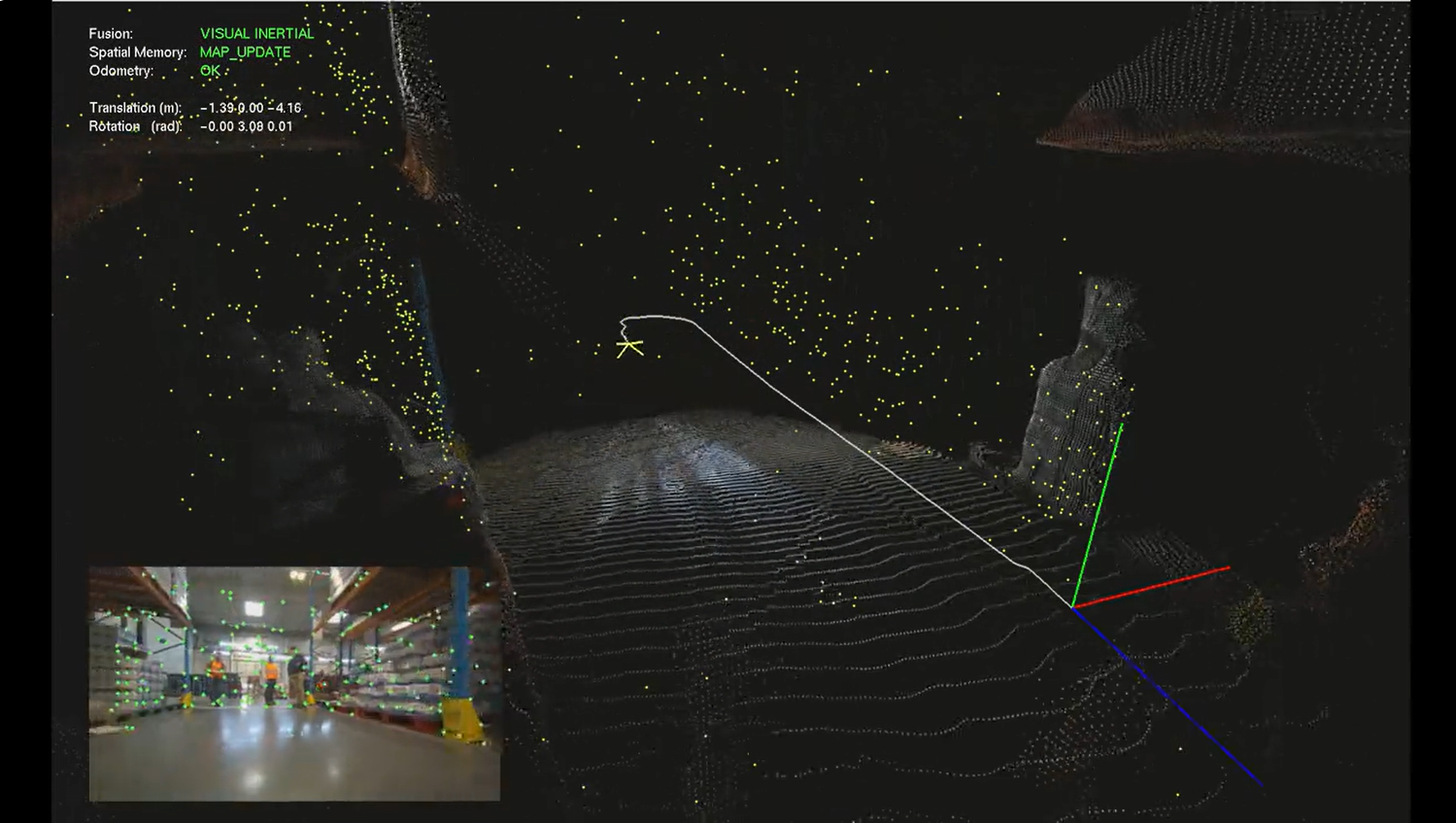
6. 面向實際部署場景的高魯棒性 SLAM 方案
第三代位姿追蹤模塊全面強化,抗動態遮擋、抗圖像失真能力大幅提升,可從容應對更復雜的環境與動態移動物體,同時始終保持精準定位。
 視覺 SLAM 關鍵幀
視覺 SLAM 關鍵幀
全新SPATIAL_MEMORY 空間內存狀態功能,可在相機重定位及回環檢測過程中提供更詳實的狀態反饋,助力工程師便捷監控定位與追蹤性能。
 更新后的示例可視化工具中新增的視覺 SLAM 2D模式
更新后的示例可視化工具中新增的視覺 SLAM 2D模式
ZED SDK 5.1 新增2D 地面追蹤模式,專為地面移動機器人及輪式設備打造。該模式將追蹤范圍約束于運動平面,有效減少定位漂移,大幅提升廠房車間、室內導航等平面場景下的定位精度。
此外,SLAM 代碼示例同步升級,搭載更直觀的可視化界面,各類定位狀態與關鍵事件均可一鍵清晰呈現。
7. ZED X One 采集性能跨越式提升
依托全新實時虛擬立體視覺 API(Live Virtual Stereo API),雙 ZED X One 相機搭建立體成像對的效率實現質的飛躍,CPU 算力效率提升約 2.5 倍。開發者可通過 SDK 直接配置虛擬成像對,甚至支持未標定模式開展 SVO 錄制或原始圖像流傳輸,滿足后期校準需求。
此次升級也正式宣告 ZED 媒體服務器(ZED Media Server)時代落幕,其原有功能已全面整合至 SDK 原生虛擬立體視覺工具中,且性能實現全面超越。
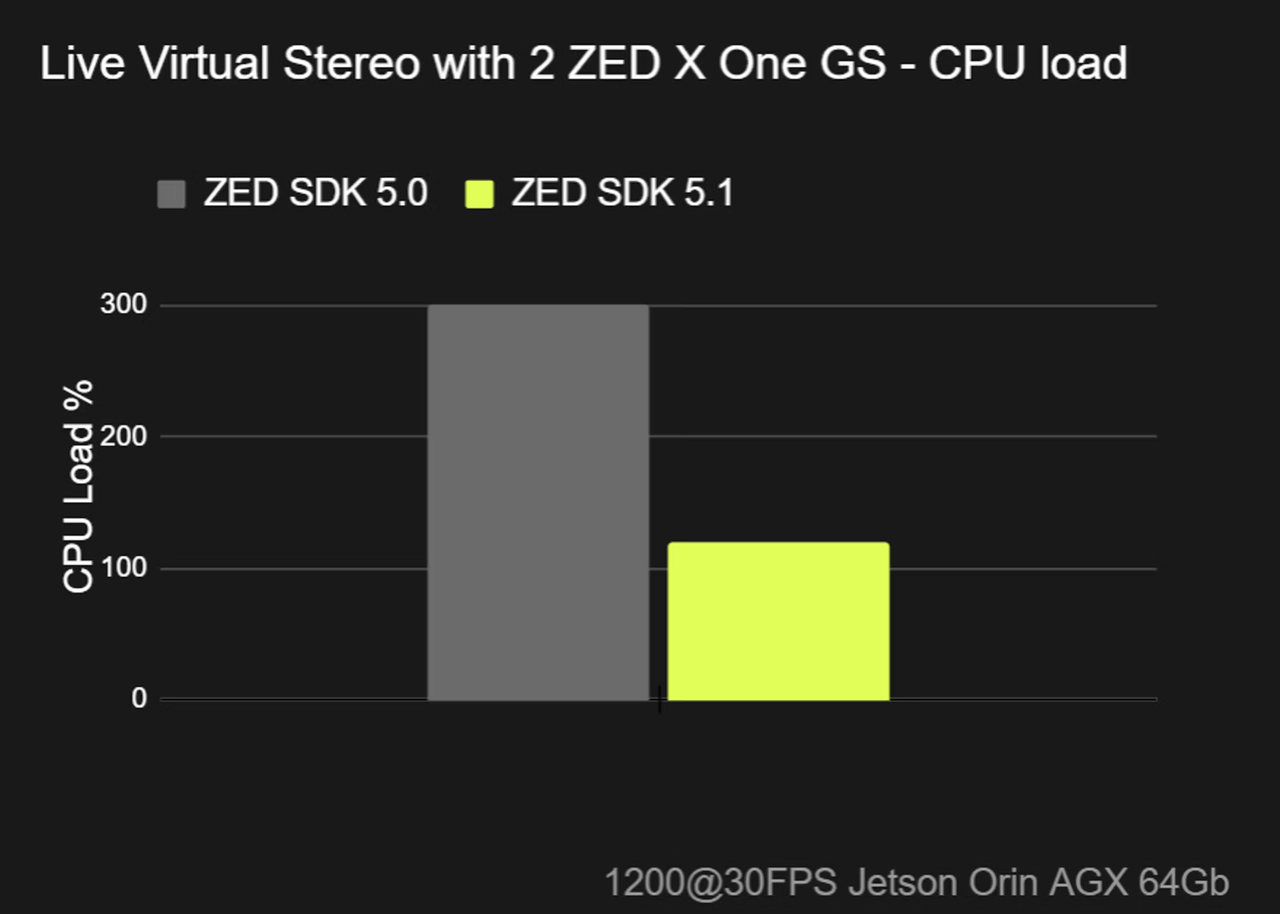 優化后的虛擬立體視覺 CPU 負載
優化后的虛擬立體視覺 CPU 負載
8. 原生魚眼標定功能全新上線
ZED SDK 5.1 原生支持 OpenCV 魚眼標定文件,實現 ZED SDK 系列相機對魚眼鏡頭的直接適配應用。這一功能可助力開發者輕松將廣角魚眼鏡頭集成至現有業務流程,是搭建大視場角導航系統或全景視覺設備的核心必備能力。如需為 ZED 相機搭配魚眼鏡頭完成標定,可查閱 GitHub 官方開源倉庫。
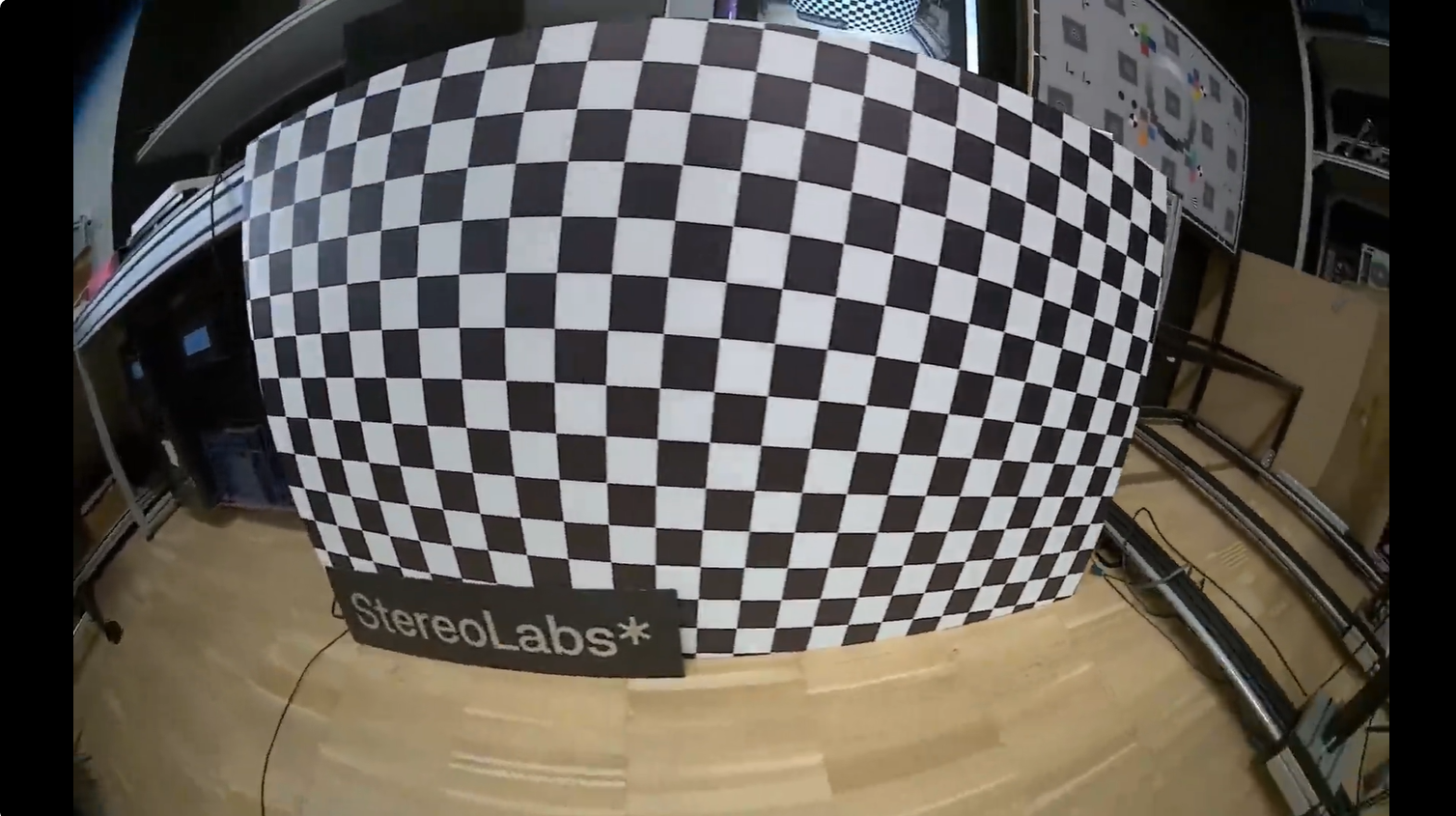 原始魚眼視圖
原始魚眼視圖  校正后魚眼視圖
校正后魚眼視圖
9. 更廣泛的兼容性,更精簡的安裝程序

ZED SDK 5.1 新增多項核心開發環境原生支持:
?支持 CUDA 13
?支持 JetPack 7
?支持 Python 3.14
?支持 C++17 及 C++20 標準
Python 開發者可通過CuPy 集成實現 GPU 數據傳輸提速,配套全新示例腳本,直觀展示深度感知與目標檢測功能的優化調用方式。
SDK 安裝包同步完成輕量化優化,Linux 系統下搭載 TensorRT 10 的安裝包體積縮減 40%;Docker 鏡像實現版本化管理,助力部署流程更便捷、開發環境復刻更高效。
結語:新一代空間AI感知方案
友思特合作伙伴Stereolabs ZED SDK 5.1 絕非只是進行了簡單的版本迭代,更是空間 AI 技術在效率、精度、靈活性上的跨越式升級。從優化的多相機采集、厘米級近距深度感知、增強型 SLAM 算法,到 Jetson Thor 平臺原生支持、全新 ZED Studio 工具上線,ZED 全生態模塊均完成深度迭代,助力您打造更高速、更智能、更可靠的視覺感知系統。
即刻體驗全新能力?立即下載ZED SDK 5.1,突破機器人與智能應用的視覺感知邊界。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31200瀏覽量
222963 -
相機
+關注
關注
5文章
1591瀏覽量
55915
發布評論請先 登錄
精密感知賦能具身智能:靈途科技高性能傳感器加速機器人多場景落地
ZED 相機 × Jetson Thor:賦能機器人全場景高性能視覺,解鎖邊緣感知無限可能
賦能機器人調試:ZED 攝像頭與 Foxglove 正式集成
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
IMU+多相機高速聯合自動標定方案
ZED系列助力下一代人形機器人發展,樹立視覺技術新標桿

普渡機器人全新發布自清潔工作站
最新發布!泰科機器人發布首款自研雙足人形機器人

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
奧比中光發布面向機器人領域的全新感知產品矩陣
Spinnaker 4 SDK助力擴展多相機成像系統




 工商網監
工商網監
評論