 賦能機器人調試:ZED 攝像頭與 Foxglove 正式集成
賦能機器人調試:ZED 攝像頭與 Foxglove 正式集成

導語:
在節奏飛快的機器人領域,清晰直觀的可視化功能是加快開發速度、優化調試流程的關鍵。基于此需求,友思特合作伙伴 Stereolabs產品 ZED 攝像頭及 ZED SDK,已與機器人開發專用平臺 Foxglove 實現全面兼容 — 借助這一專業化工具組合,您可通過全新維度的可視化手段,高效調試并優化機器人系統。
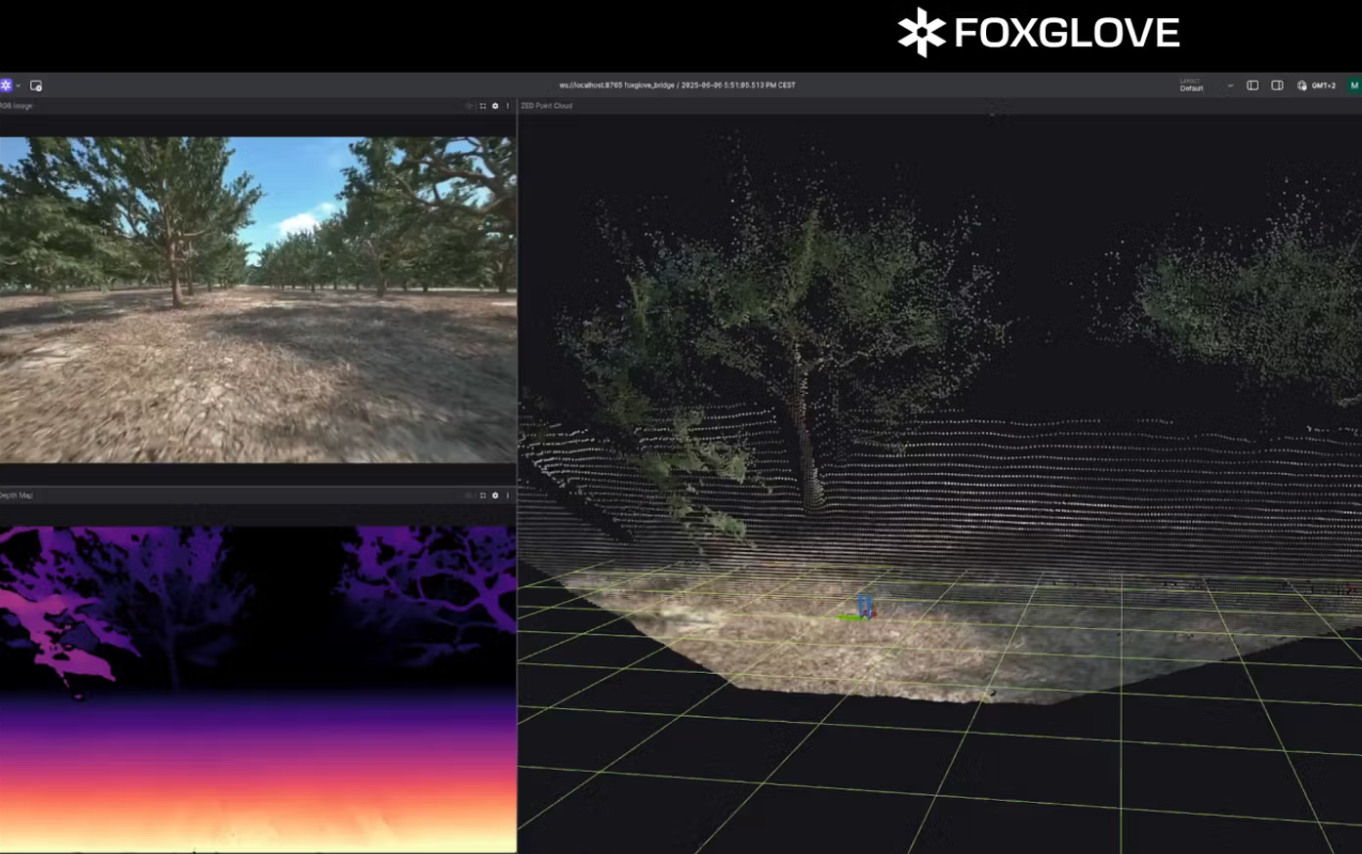
借助ZED 與 Foxglove的組合,我們可以實現實時流式傳輸并可視化呈現豐富的立體視覺和深度數據,為開發過程的每一步帶來全新的強大洞察。
一、集成核心價值|為何此次聯動至關重要
隨著機器人在日益復雜的環境中運行,我們需要更高效的方式洞察機器人的視角 —— 并在系統運行不符合預期時,快速定位到問題根源。
友思特合作伙伴 Stereolabs產品 ZED相機以其行業領先的深度感知、3D測繪和視覺慣性里程計能力而聞廣受認可。而 Foxglove 則提供了一套靈活易用的可視化與調試工具集,專為機器人技術設計。
這種強強聯合,通過嵌入式 Stereolabs軟件算法實現更快速、更全面的可視化,從而加速機器人應用開發,更廣泛地推動各行業應用。
二、核心功能解析|ZED+Foxglove的核心應用
將 ZED 相機與 Foxglove 結合,機器人開發團隊可實現以下操作:
實時可視化立體視頻與深度數據
將高保真 2D 及 3D 相機數據流無縫流式傳輸至 Foxglove 可視化工具中。
精準調試機器人感知系統
并列分析深度圖、點云、相機圖像、定位跟蹤結果、三維建圖、目標檢測及語義信息,快速定位感知或導航問題。
跨 ROS 與非 ROS 架構加速開發
無論你使用機器人操作系統 ROS2、ROS1,還是自定義中間件,ZED 功能靈活的 SDK 都能確保相機數據輕松接入 Foxglove。
集成至復雜工作流,借助 Foxglove 的面板、布局及時間軸功能,將 ZED 傳感器數據與其他系統指標相關聯,實現全面調試。
三、快速上手指南 | ZED+Foxglove 操作流程
核心流程如下:
連接 ZED 相機
通過 ZED SDK 完成 ZED 2i、ZED Mini 或 ZED X 系列相機的配置。
發布 ZED 數據
基于ROS的應用:借助 ZED ROS 封裝器(ZED ROS Wrapper),將相機圖像、深度圖和點云發布為 ROS 話題。
非ROS應用:通過自定義中間件,利用 WebSocket 將 ZED SDK 與 Foxglove 連接,實現相機圖像、深度圖和點云的無縫發布。
在 Foxglove 中可視化與調試
打開 Foxglove,連接至你的 ROS 應用 / 自定義中間件,加載相關話題。在靈活易用的 Foxglove 界面(FoxgloveUI)中,可即時可視化立體視頻、3D 點云等數據。
實用技巧:你還可以將操作會話錄制為 MCAP 文件,以便后續在 Foxglove 中回放和分析!
四、行業實踐案例 | SLAM系統調試的高效方案
設想一個研發自主地面機器人的團隊。他們通過ZED實時傳輸Terra(感知系統)在機器人環境導航時采集的所有感知數據。在 Foxglove 中實時可視化這些數據后,團隊能快速發現各類問題— 比如深度讀數不準確、地圖對齊偏差或障礙物誤檢等 — 全程無需翻閱繁瑣的原始日志。
最終成效如下:
更快的迭代周期
更全面理解機器人感知系統架構
更穩健的感知系統
團隊工作效率大幅提升
五、配置要求與操作指南 | 啟用ZED+Foxglove
開始搭配使用 ZED 相機與 Foxglove,需參考以下信息:
最低配置要求
ZED SDK 4.0 及以上版本
ROS2 Humble 及以上版本(可選, 僅ROS用戶需滿足)
Foxglove 2.0 及以上版本
操作指南(將Foxglove 連接至 ROS 2)
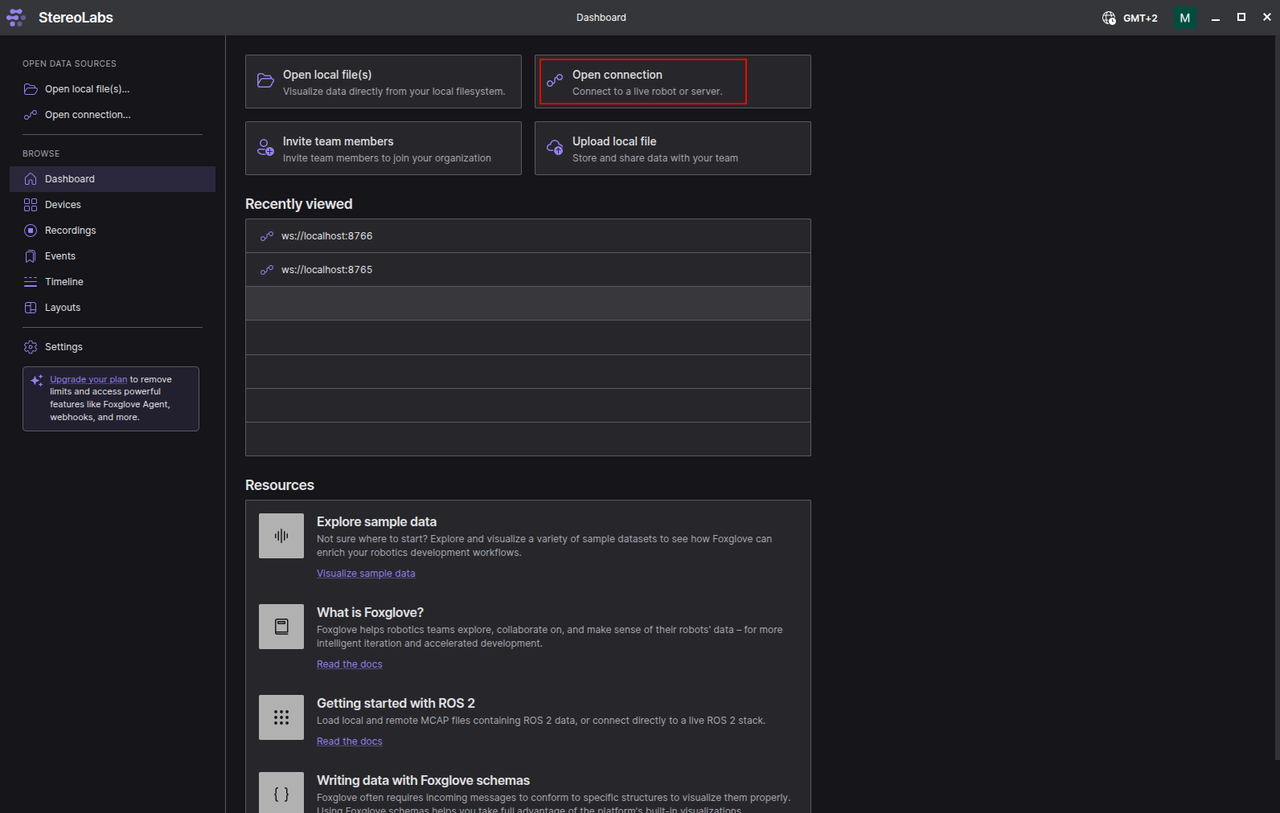
第一步:在 Foxglove 中,點擊“開始連接”
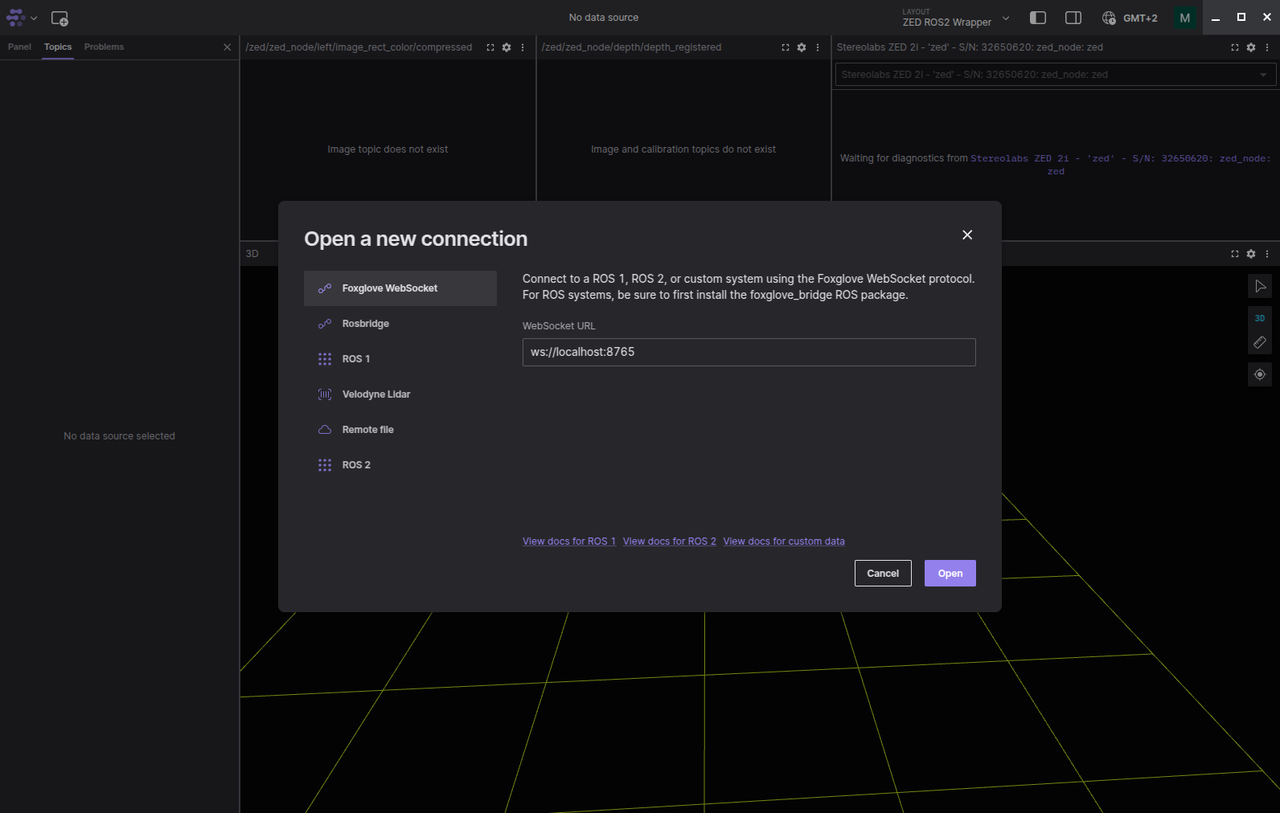
第二步:輸入URL:ws://localhost:8765 并點擊“連接”
第三步:如果您尚未下載Stereolabs的 Foxglove 布局文件,請先下載后點擊右上角的“從文件導入…”進行導入。
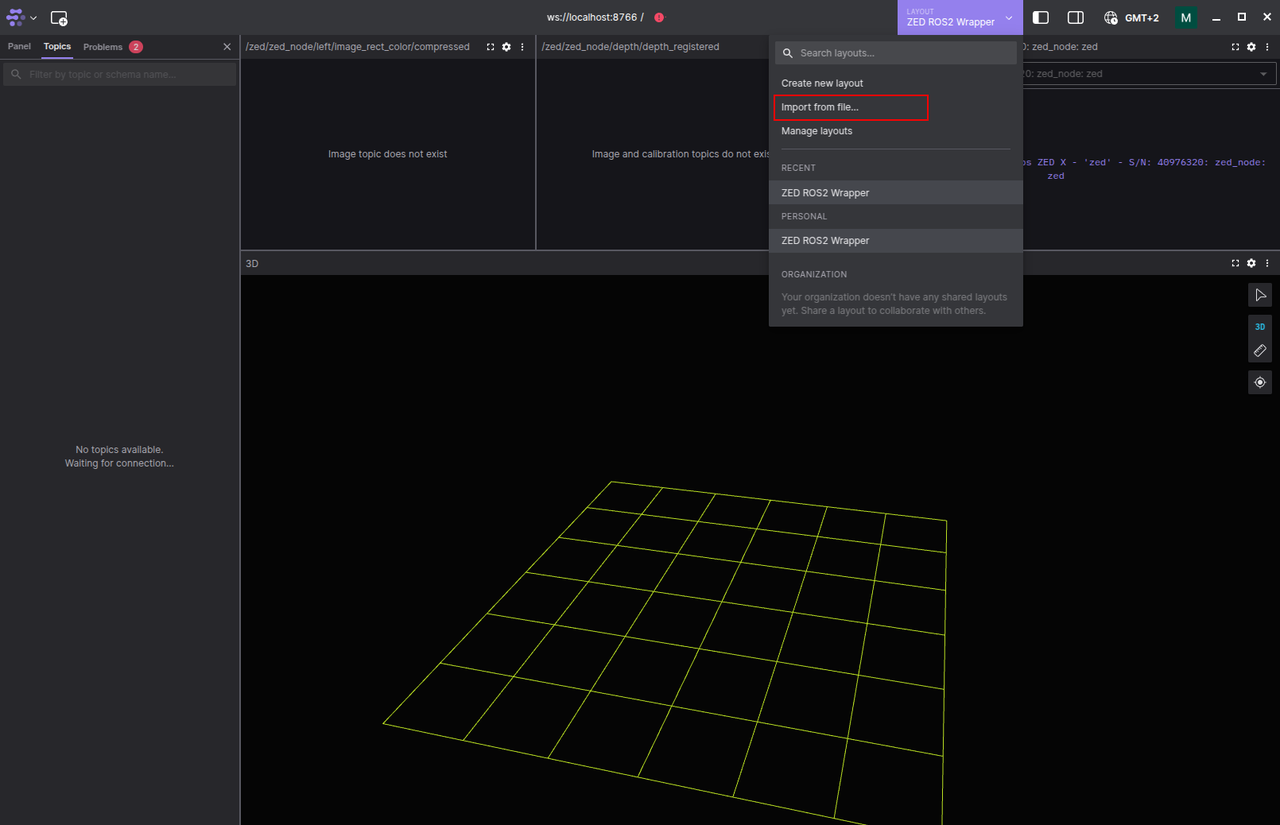
現在,您應該能夠看到ZED數據流已實現可視化呈現!
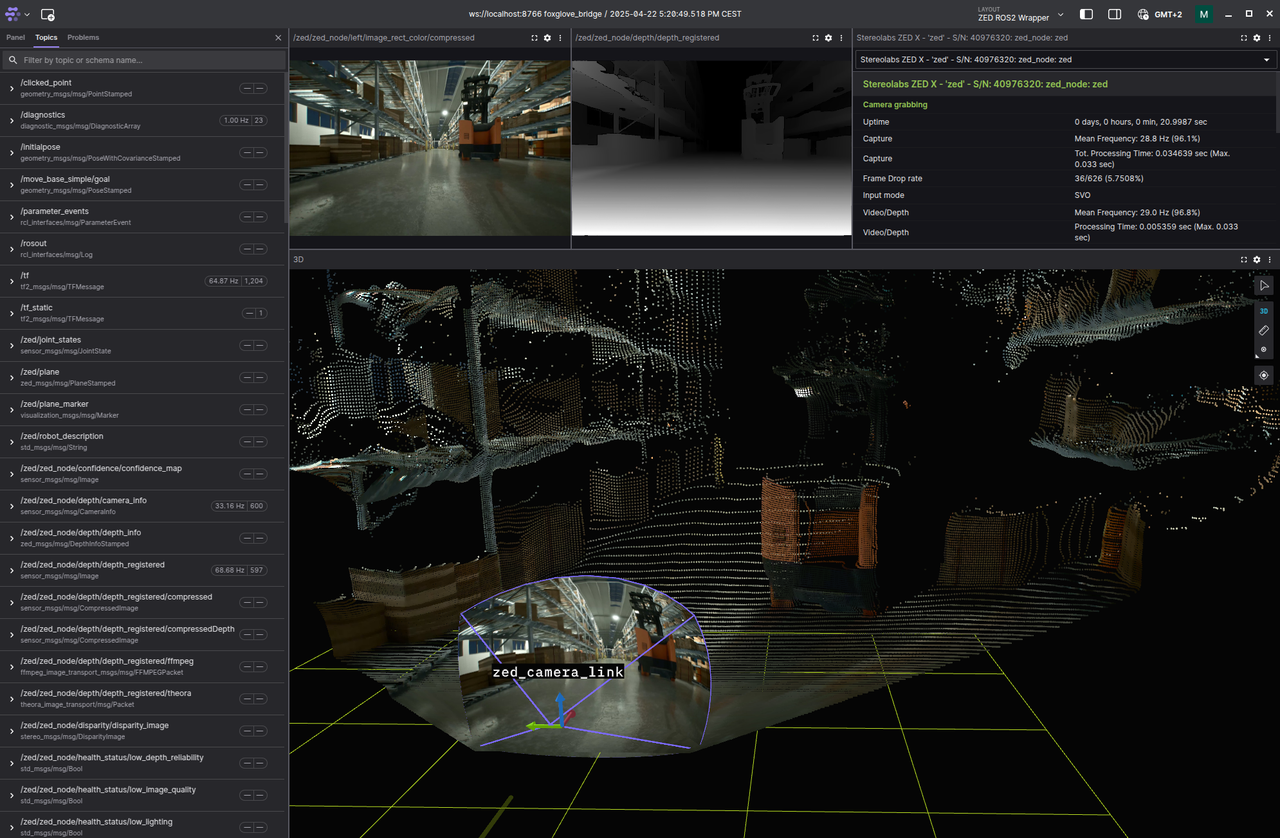
完成上述幾步操作,便可可視化呈現強大的 3D 感知數據,讓你的機器人項目實現突破。
六、ZED+Foxglove 賦能未來研發
隨著機器人系統的日趨復雜,可視化調試工具已成為不可或缺的核心支撐。友思特合作伙伴Stereolabs產品 ZED 與 Foxglove 的深度融合,為行業提供了一套強大且靈活的解決方案 — 可將 3D 視覺能力無縫整合至工作流中,最終實現部署效率提升、程序漏洞降低,進而構建更智能的機器人系統。
如需開展相關實踐,即刻接入 ZED 相機、啟動 Foxglove 工具,以全新維度探索機器人的感知世界!
友思特ZED系列視覺系統

ZED X One 單目相機是靈活集成和定制立體系統或多攝像頭環繞視覺的理想選擇,特別適合于大型機器。與此同時,它高度通用,提供各種傳感器選項以滿足應用:4K HDR高分辨率和高靈敏度要求,以及適用于快速移動車輛的全局快門。

ZED X 系列雙目相機可滿足機器人導航和自動化設計在前沿工作項目的需求,有ZED X 和ZED X Mini 兩款型號(以及一款ZED X One 單目相機)。所有功能均由全局快門傳感器和安全的GMSL2連接驅動,ZED X專用于障礙物檢測和導航燈應用,ZED X Mini專用于采摘等短距離應用。

ZED 2 雙目視覺相機以超高深度傳感和易用性為核心,是在機器人、數字孿生和沉浸式體驗邊緣工作的團隊的首選,兩個型號可選,滿足不同項目需求:ZED 2i 使開發人員能夠構建能夠理解周圍環境的先進系統,且堅固耐用。ZED Mini 可用于短程應用。

ZED Box是強大的嵌入式微型pc,用于邊緣人工智能和機器人技術。該產品由全新NVIDIA?Jetson Orin?NX或AGX Orin?模塊提供支持,是一款適用于具有挑戰性環境的工業AI網關,可選16GB/8GB版本。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31079瀏覽量
222266 -
攝像頭
+關注
關注
61文章
5091瀏覽量
103122 -
ZED
+關注
關注
0文章
10瀏覽量
3831
發布評論請先 登錄
世強硬創車規級視覺方案賦能機器人突破技術難題
RK3588平臺USB攝像頭調試實戰:從報錯到穩定運行
自動駕駛既然有雙目攝像頭了,為什么還要三目攝像頭?

突破攝像頭系統設計邊界 | 拓爾微電子全鏈路芯片解決方案賦能下一代視覺應用
多場景智能拍攝實戰:攝像頭模塊集成與調試指南!
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
抗輻照MCU在核電站巡檢機器人攝像頭模組中的應用探討

360環視技術推薦的硬件平臺:支持多攝像頭與三屏異顯的理想選擇
K230micropython下能實現同時用USB攝像頭和板載攝像頭YOLO識別并顯示在IDE上嗎?
橋接智能制造:PROFINET與Devicenet混合架構賦能汽車擦凈機器人升級

詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
社區安裝IPC攝像頭,跟安裝一般安防監控攝像頭有什么區別?




 工商網監
工商網監
評論