 激光雷達:智能革命的“感知中樞”,連接數字與物理世界
激光雷達:智能革命的“感知中樞”,連接數字與物理世界

2026年的世界,正站在一場智能革命的關鍵節點。《麻省理工科技評論》發布的年度十大突破性技術,為我們勾勒出一幅由算法、機器與能源共同編織的未來圖景。在這份充滿科幻感的榜單中,從馳騁于道路的自動駕駛汽車,到靈活服務的人形機器人;從深邃太空的商業空間站,到驅動一切的人工智能超算——一項看似“傳統”的感知技術,卻如同無處不在的神經網絡末梢,將所有這些宏大構想錨定在物理現實之中。這項技術就是激光雷達(LiDAR)。

本文旨在深入探討,激光雷達如何超越其作為單一傳感器的角色,演進為連接數字智能與物理世界的核心感知層。我們將看到,它不僅是榜單中“自動駕駛”與“機器人”兩大焦點的“銳利之眼”,更是貫穿其他多項突破性技術,從能源、計算到太空探索的關鍵賦能者與協同進化伙伴。這是一場關于“感知”如何定義“智能”邊界的故事。
第一章 基石:激光雷達何以成為智能之眼
1.1 核心原理:用光丈量世界
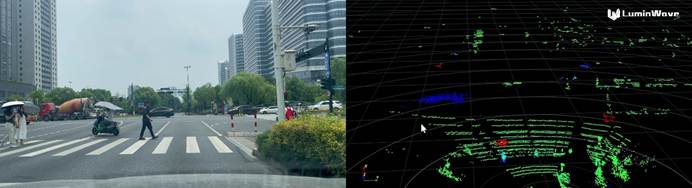
激光雷達的本質,是光學的精密測距藝術。其系統主動向目標發射激光脈沖,通過測量光束從發射到被物體反射后接收的時間差(飛行時間,ToF),乘以光速,即可計算出精確的距離。每秒數百萬次的測量,匯聚成密集的“點云”,如同用無數光點對世界進行高保真的三維素描。
相較于攝像頭(依賴環境光、易受干擾)和毫米波雷達(精度較低、細節不足),激光雷達的核心優勢在于其主動探測、高精度三維建模和強大的抗環境光干擾能力。它賦予了機器一種接近人類、卻又超越人類的深度視覺。
1.2 技術演進:從機械巨人到片上系統
激光雷達的發展史,是一部微型化、固態化和成本控制的奮斗史。
第一代機械旋轉式:通過旋轉的發射接收模塊實現360度掃描,猶如旋轉的“燈塔”。它性能優異但成本高昂、體積龐大、可靠性面臨挑戰,主要用于早期測試和測繪。
第二代混合固態(MEMS/轉鏡):用微振鏡或旋轉鏡面代替整體旋轉,大幅減小了體積,提升了可靠性,是當前車規級前裝量產的主流路徑。
第三代純固態(OPA、Flash):代表了終極方向。光學相控陣(OPA)通過調控芯片上無數納米天線改變光束方向;面陣Flash則像手電筒一樣瞬間照亮整個場景。它們無任何運動部件,更易通過車規,是通向大規模普及的鑰匙。當前,行業正處在從混合固態向純固態過渡的關鍵階段。
在這一技術躍遷中,洛微科技(LuminWave)憑借其成熟的硅光子集成技術,成為推動這一趨勢的重要力量。硅光子技術利用半導體 CMOS 工藝,將激光器、調制器、波導、探測器等眾多光學器件集成于單顆硅基芯片,替代了傳統的分立光學系統。這一技術路徑不僅顯著縮小了激光雷達核心系統的體積,更有助于提升量產一致性與可靠性,并通過工藝成熟度優化成本結構,被視為推動FMCW 激光雷達走向規模化商用的關鍵方向。2024 年,洛微科技發布了全球首個單片全集成硅光芯片,將 FMCW 激光雷達所需的發射、接收及光路功能全部集成于單一芯片,標志著激光雷達在“片上系統”(SoC)集成化道路上邁出了關鍵一步。
第二章 核心舞臺:榜單中的兩大直接驅動引擎
2.1 自動駕駛:安全冗余的“生命線”
在《麻省理工科技評論》榜單的“自動駕駛”領域,激光雷達已非“是否需要”的爭論,而是“如何最佳集成”的工程實踐,尤其是在L3級(有條件自動駕駛)及以上系統中。
核心價值——構建確定性安全:在復雜的“城市場景”中,面對“鬼探頭”、不規則障礙物、惡劣天氣等長尾難題,視覺算法可能失效。激光雷達提供的厘米級精度三維信息,是識別靜態障礙物、精確判斷車距的終極物理依據。它與攝像頭(提供豐富語義)、毫米波雷達(測速優勢)融合,構成了感知系統的“鐵三角”,為安全提供了至關重要的冗余備份。
技術融合趨勢:未來的發展并非傳感器堆砌,而是前融合與感知大模型驅動下的深度協同。原始點云數據與圖像像素在數據層面進行早期融合,再輸入到基于Transformer架構的感知大模型中統一處理。這使得系統能更直觀地理解“一個由多種數據共同描述的3D物體”,而非事后拼接信息,大幅提升了對復雜場景的理解能力和泛化性。
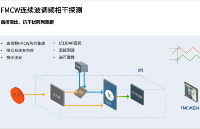
洛微科技的FMCW(調頻連續波)4D激光雷達技術,為這一安全冗余體系帶來了維度上的革新。其面向L3+市場研發的硅光FMCW 4D激光雷達F系列產品,不僅能提供250米超遠距離、0.1°×0.1°超高角分辨率的精細三維點云,更關鍵的是能通過相干探測原理,直接測量出每一個點的瞬時速度,形成“第四維”的速度場數據。這意味著車輛不僅能“看到”物體的位置和形狀,還能直接“讀出”其運動矢量,從而更早、更可靠地預測行人橫穿、車輛加塞等風險行為。這種抗環境光干擾能力強、具備直測速度場能力的FMCW技術,被認為是實現高階自動駕駛真正安全冗余的關鍵,已成功切入國內頭部商用重卡的前裝量產項目。
2.2 機器人:從靈巧作業到“具身智能”的空間意識
榜單中“機器人”技術的騰飛,特別是具身智能機器人從實驗室走向通用場景,極度依賴對非結構化環境的理解與交互能力。
從導航到交互的躍升:對于倉儲AGV,激光雷達是實現SLAM(同步定位與地圖構建)導航的基礎。但對追求通用化的具身智能機器人而言,需求更高:它需要識別細小物體(如桌上的鑰匙)、判斷物體材質(能否抓取)、理解空間關系(抽屜如何拉開)。高分辨率激光雷達能提供物體的細致表面幾何信息,為抓取點預測、力控操作提供前置輸入。
3D視覺傳感:機器人的“慧眼”:在工業自動化與機器人領域,激光雷達的另一種重要形態——3D工業相機,正扮演著核心角色。洛微科技的D系列高性能3D工業相機,采用ToF原理,能夠提供毫米級的測量精度和超高幀率,即使在黑暗、粉塵、強光等惡劣環境下也能穩定工作。這類產品已廣泛應用于割草機器人、機械臂安全區域防護、物料拆碼垛、油罐車罐口定位、機械臂引導分揀等場景,為機器人裝上了可以實時理解三維作業空間的“慧眼”。這不僅是簡單的“看到”,更是“理解”物體在空間中的精確位置、姿態和尺寸,是實現柔性制造和智能物流的基石。
第三章 賦能網絡:榜單技術對激光雷達的生態支撐
激光雷達的效能最大化,離不開其他突破性技術構成的堅實底座。
3.1 超大規模AI數據中心:點云數據的“智慧大腦”
海量、實時的點云數據本身毫無意義,直到被算法理解。這正是“超大規模AI數據中心”的角色。
訓練與推理的算力源泉:訓練一個能夠精準識別百萬級點云中行人、車輛的神經網絡,需要消耗海量算力。自動駕駛公司每年在算力上的投入以億計,用于處理激光雷達等傳感器數據。云端數據中心負責復雜的模型訓練和仿真測試,而車端的計算平臺(同樣受益于AI芯片進步)則進行毫秒級的實時感知推理。
驅動“機制可解釋性”需求:隨著AI決策在自動駕駛中權重越來越高,榜單中“機制可解釋性”技術變得至關重要。我們需要理解:AI是如何基于激光雷達點云做出“緊急制動”或“向左避讓”決策的?可解釋性AI有助于審計感知模型的“注意力”是否聚焦在正確區域,驗證激光雷達數據融合的可靠性,從而建立對機器決策的信任。
3.2 能源革命:動力與成本的“解耦密鑰”
榜單中的“鈉離子電池”與“下一代核能”,從兩個維度支撐激光雷達應用生態。
鈉離子電池:普及化的推手:電動汽車和自主移動機器人是激光雷達最大的應用市場。鈉離子電池以其低成本、高安全性和優異低溫性能,有望加速中低續航車型和各類機器人的普及。這為在中端產品上標配高性能傳感器提供了成本空間,從而加速激光雷達市場的規模化,形成“更好用的車/機器人吸引更多數據,數據反哺算法進步”的正向循環。
下一代核能:生態的基石:無論是制造激光雷達的精密工廠、訓練AI的耗電數據中心,還是未來億萬電動設備的充電網絡,都需要巨量、穩定、清潔的基荷電力。核能(尤其是小型模塊化反應堆)提供的零碳電力,是支撐整個智能社會綠色運轉的底層保障。
第四章 協同進化:激光雷達在前沿領域的角色拓展
激光雷達并非被動接受賦能,它也在主動拓展邊界,與榜單技術相互激發。
4.1 商業空間站:地外工程的“標尺與衛士”
在失重、高輻射、極端溫差的太空環境中,可靠性就是生命。基于硅光集成技術的固態激光雷達因其無運動部件、抗輻射設計潛力,成為理想選擇。
在軌服務與維護:空間站外部或服務機器人可利用激光雷達,對對接接口、太陽能帆板、艙體表面進行亞毫米級的高精度三維掃描,檢測微流星體撞擊損傷或設備變形,指導機械臂進行精確維修。
自主交會對接與碎片規避:為往返于空間站之間的貨運飛船提供獨立的、不依賴GPS的相對導航與避障能力,確保在復雜太空環境中的操作安全。
4.2 從微觀到宏觀:感知邊界的無限延伸
激光雷達的波長從近紅外向短波紅外甚至中紅外擴展,使其具備了初步的物質光譜分析能力。這開啟了與“胚胎評分”、“堿基編輯”等生命科學技術的潛在交叉。
在生物安全實驗室或細胞培養工廠中,集成光譜分析功能的激光雷達系統,未來或能以非接觸、無損的方式,監控培養環境的微觀顆粒物、檢測生物反應器的細胞團密度,為精密生物制造提供一種新的過程控制工具。雖然當前直接聯系不深,但這體現了感知技術向更精細維度滲透的趨勢。
第五章 未來展望:挑戰與融合共生的未來
5.1 當前挑戰
前路依然崎嶇:成本仍需持續下降以實現全面普及;車規級可靠性(尤其在極端溫度、振動下的長期穩定性)是量產的生命線;面對暴雨、濃霧等極端天氣,性能仍需提升;如何處理海量點云數據同時降低計算功耗,是軟硬件共同面臨的挑戰。
5.2 融合共生:超越傳感器的未來
激光雷達的未來,絕非孤立發展。它將更深地融入一個“傳感-計算-執行”的融合體系:
硬件層面:與攝像頭、毫米波雷達進行芯片級異構集成,共享光學孔徑、數據處理單元,從物理上降低成本與體積。
軟件與算法層面:作為多模態感知大模型的核心數據流之一,與矢量地圖、車路協同信息深度融合,共同構建動態的“世界模型”。
系統層面:成為未來智慧城市“數字孿生”的實時數據采集終端,其動態點云數據不斷更新城市的虛擬鏡像,為更廣泛的智能決策提供基礎。
結語:感知定義智能的邊界
回顧《麻省理工科技評論》2026年的十大突破性技術,我們清晰地看到,激光雷達已從一項獨立的遙感技術,演變為智能機器認知物理世界的核心感官。它不僅是自動駕駛和機器人兩大浪潮的直接驅動者,更通過與人工智能、新能源、太空科技的深度協同與相互賦能,將自己編織進了未來技術生態的網絡之中。
以洛微科技為代表的創新力量,正通過硅光集成、FMCW、高精度3D視覺等具體技術路徑,將激光雷達推向更集成、更智能、更經濟的新階段,使其能夠在自動駕駛中提供本質安全的4D感知,在工業與具身智能機器人中賦予精準的“手眼協調”能力。
從微觀的細胞操作到宏觀的星際探索,機器智能的每一次具身化嘗試,都始于對環境的精確感知。激光雷達,這把用光雕刻空間的精密刻刀,正在幫助人類和機器共同繪制一幅前所未有的、可被精確測量和智能交互的實體世界藍圖。在這個藍圖中,感知的邊界,即是未來智能所能抵達的遠方。
參考文章:https://news.qq.com/rain/a/20260112A06S8G00
-
人工智能
+關注
關注
1817文章
50094瀏覽量
265275 -
激光雷達
+關注
關注
979文章
4469瀏覽量
196506
發布評論請先 登錄
車載激光雷達溫度監控:NTC芯片的核心應用
硅光加持下的感知革命:FMCW 激光雷達技術全景解讀
激光雷達:智能時代的“感知之眼”,開啟三維世界新紀元

禾賽科技與理想汽車續簽激光雷達合作
激光雷達為什么會出現串擾的問題?

洛微科技攜4D FMCW激光雷達與3D感知方案閃耀光博會,引領行業新趨勢

激光雷達進入新時代,數字芯片化革命與資本變局正重塑行業


自動駕駛只用激光雷達進行感知會有哪些問題?
FMCW激光雷達,加速落地工業場景
SPAD席卷車載激光雷達市場
激光雷達(LiDAR)技術方案與工作原理全解析

LD Gen2 Lite激光雷達:賦予機器人 “感知力” 的關鍵
鐳神智能激光雷達飛行汽車/eVTOL避障系統解決方案—開啟低空安全飛行新未來

激光雷達技術:自動駕駛的應用與發展趨勢




 工商網監
工商網監
評論