 AGV機器人如何精準識別庫位有無貨物?
AGV機器人如何精準識別庫位有無貨物?

在現代智能倉儲系統中,AGV(自動導引車)機器人已成為提升效率、降低成本的“明星設備”。它們能自主導航、搬運貨物,實現倉庫的無人化操作。但AGV如何精準判斷庫位是否有貨?這背后隱藏著哪些黑科技?本文將為您揭秘AGV識別庫位狀態的三大核心技術。
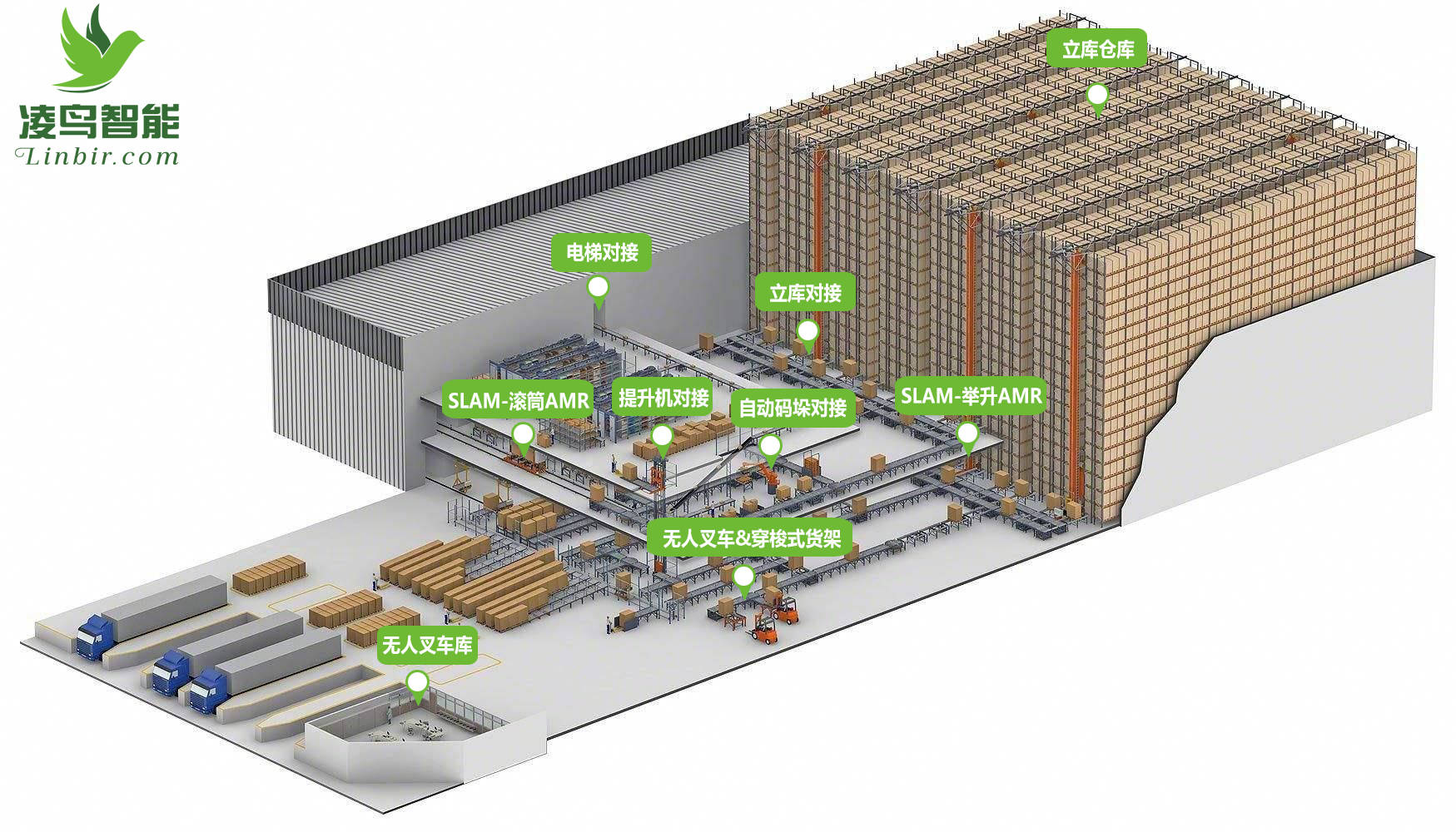 AGV智能無人倉
AGV智能無人倉
一、激光傳感器:AGV的“精準測距儀”
激光傳感器是AGV識別庫位狀態的核心設備之一。它通過發射激光束并接收反射光,利用激光的傳播時間和角度,精確測量庫位與AGV的距離和相對位置。當AGV靠近庫位時,激光傳感器會快速掃描庫位區域,檢測是否有障礙物反射信號。
空庫位識別:若庫位為空,激光束會直接穿透或反射微弱,傳感器接收到的信號強度較低,AGV據此判斷庫位未被占用。
有貨庫位識別:當貨物存在時,貨物表面會反射激光,傳感器接收到較強的反射信號。通過分析反射光的模式(如強度、角度變化),AGV可判斷貨物的大小、形狀和位置,從而確認庫位狀態。
激光傳感器的優勢在于其高精度和快速響應能力,即使在復雜的光照條件下,也能穩定工作。然而,它對透明或反光貨物的識別可能存在挑戰,需結合其他技術進行優化。
 AGV小車
AGV小車
二、視覺識別技術:AGV的“智能攝像頭”
視覺識別技術為AGV提供了更豐富的環境感知能力。配備高清攝像頭的AGV會對庫位進行圖像采集,利用圖像處理和機器學習算法,分析圖像中的貨物特征。
圖像特征學習:系統會提前學習有貨和無貨庫位的圖像特征(如顏色、紋理、形狀等),通過深度學習模型訓練,使AGV能夠自動識別庫位狀態。
實時識別與調整:面對新的庫位圖像,AGV會快速比對預存特征,判斷是否有貨物存在。同時,視覺系統還能識別貨物的擺放姿態,為后續的搬運操作提供指導。
視覺識別技術的優勢在于其強大的信息處理能力和適應性,能夠識別各種類型的貨物。但它在光線不足或貨物遮擋嚴重的情況下可能表現不佳,需結合激光傳感器或壓力傳感器進行互補。
 AGV叉車
AGV叉車
三、壓力傳感器:AGV的“重量感知器”
壓力傳感器是另一種直接有效的識別方法。在庫位安裝壓力傳感器后,當貨物放置在庫位上時,傳感器會檢測到重量變化,并將信號傳輸給AGV。
重量變化檢測:壓力傳感器通過測量庫位的承重變化,判斷是否有貨物存在。這種方法的準確性較高,且不受貨物材質和形狀的影響。
信號傳輸與處理:AGV接收到壓力傳感器的信號后,會立即處理并更新庫位狀態信息,確保搬運操作的準確性。
壓力傳感器的優勢在于其簡單性和可靠性,特別適用于對重量變化敏感的庫位。然而,它可能無法識別輕量或非承重型的貨物,需結合其他技術進行綜合判斷。
 無人AGV
無人AGV
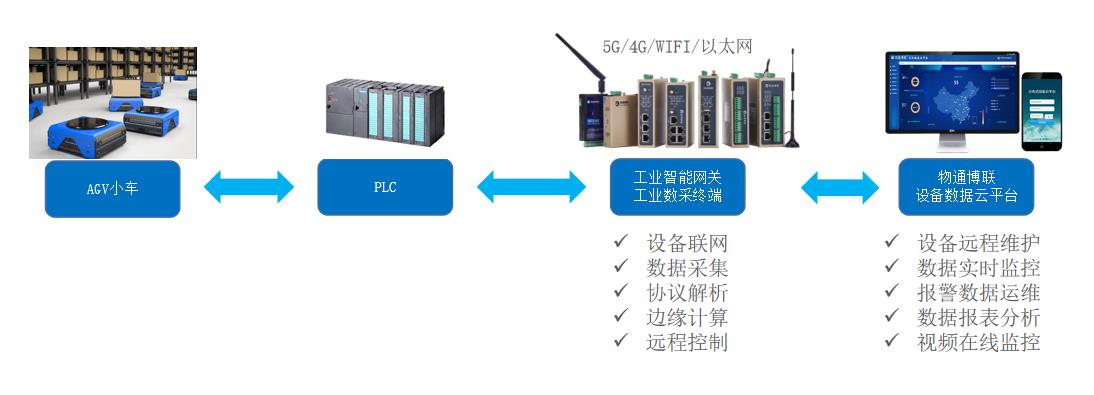
在實際應用中,AGV通常會綜合運用激光傳感器、視覺識別技術和壓力傳感器,以提高識別準確性和可靠性。這種多技術融合的方式,使AGV能夠在各種復雜環境下穩定工作,為智能倉儲系統提供強大的支持。
隨著技術的不斷進步,AGV識別庫位狀態的能力將進一步提升。未來,我們可能會看到更多創新技術的應用,如3D視覺識別、AI深度學習等,為AGV賦予更強大的“火眼金睛”,推動智能倉儲向更高水平發展。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31074瀏覽量
222189 -
AGV
+關注
關注
28文章
1554瀏覽量
43664
發布評論請先 登錄
【案例分享】電子谷多芯線束賦能高效產線!AGV 搬運機器人穩定連接方案

探索RISC-V在機器人領域的潛力
復合機器人對比傳統AGV和機械臂的優勢何在?

AGV搬運機器人聯網監控系統方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
AGV機器人選型技術分析與應用策略
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
智慧檔案庫房|經世智能復合機器人檔案存取與轉運解決方案

工業機器人的特點
明遠智睿SSD2351開發板:語音機器人領域的變革力量
盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
AGV搬運機器人耗電量因素



 工商網監
工商網監
評論