 12軸步進驅動的光柵尺全閉環解決方案ZMC412CL
12軸步進驅動的光柵尺全閉環解決方案ZMC412CL

步進驅動為什么要采?外置光柵尺?
步進驅動外置光柵尺相較于伺服驅動調試簡便、成本低,廣泛應用于低速高扭矩、負載波動、機械傳動平臺高精度末端定位、成本預算敏感的工業控制場景,如自動化設備、精密加工、機器人控制、計量儀器等。

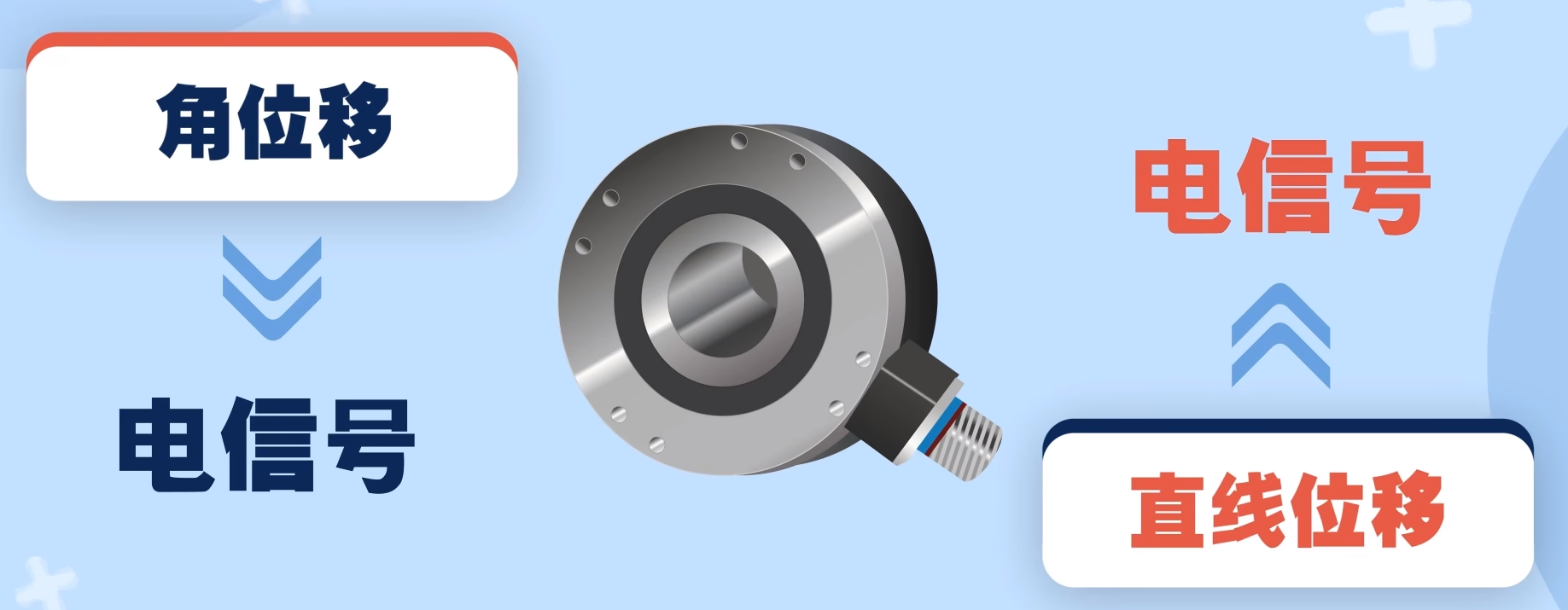
傳統步進系統采用開環控制,脈沖指令與傳動平臺末端位移的最終位置可能并非是目標位置,易受傳動鏈誤差及負載擾動影響而產生定位偏差。通過外置光柵尺后,可直接反饋負載的實際位移,控制器基于位置誤差實時修正脈沖輸出,實現平臺末端的全閉環高精度運動控制。

(步進電機全閉環控制系統原理示意圖)
正運動12軸步進控制的光柵尺全閉環解決方案:ZMC412CL
為了解決這些問題,正運動推出12軸脈沖型網絡運動控制器ZMC412CL,支持多軸位置反饋閉環控制,并在運動過程中基于反饋誤差對脈沖指令進行實時修正,從而降低末端位置誤差與失步風險。
控制器采用FPGA實現底層運動控制與反饋信號高速采集處理,并提供統一API開發函數庫,用戶可進行二次開發快速構建閉環控制應用。方案在保留步進控制系統低成本、易集成、易調試優勢的同時,并將末端精度與系統可靠性提升至趨于脈沖伺服控制系統的應用水平。

步進電機的外置光柵尺全閉環解決方案
ZMC4系列高效的網口讀寫,PCIe/PCI系列卡可共享內存接口(MotionRT750系列產品共享內存的批量讀寫1-3us);
內置反向間隙補償,雙向螺距補償,2D平面補償;
支持正、負、零限位的硬限位設置和正負限位的軟限位設置;
控制器位置比較輸出最高精度可以精確到1個脈沖;
BissC編碼器的脈沖控制的全閉環;

ABZ差分編碼器的脈沖控制的全閉環。

通過RTSys示波器對比開環控制與全閉環控制效果
開環控制


閉環控制


測試發現:步進驅動器的閉環控制,運動過程中隨動誤差(規劃位置和光柵尺反饋位置的差值)除了啟動和停止以外大部分保持在0個脈沖當量左右,相比較開環控制有較大的提升,當運動結束時光柵尺的反饋位置和指令規劃位置也是相等的。
總結:在相同速度/加速度與負載條件下,運動開始階段,兩種方案均有振蕩。開環控制方案在運動階段峰值誤差更大、振蕩衰減過程更長,表明末端誤差受傳動鏈與機構動態影響更明顯。
引入光柵尺全閉環后,系統以負載真實位移為反饋量,隨動誤差峰值降低且誤差收斂更快、穩定時間更短。結果說明全閉環可有效抑制傳動誤差、間隙與擾動引起的末端偏差。
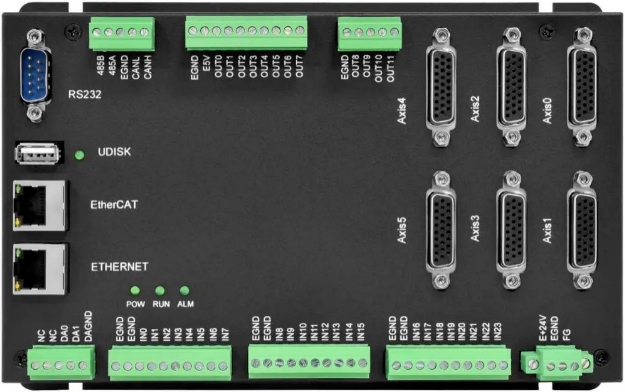
ZMC412CL脈沖型網絡控制器硬件信息

本身支持12軸,最多可擴展至32軸。
24路通用數字量輸入,8路高速鎖存,12路通用數字量輸出,2路PWM輸出和4路PSO硬件比較輸出。

支持2路模擬量輸出DA。
支持RS232、RS485、CAN總線以及EtherNET網口等通訊接口。
以太網接口,可實現生產線或系統的遠程控制、集散控制。
兼容步進、馬達、伺服等常見電機,可以實現直線插補、圓弧插補、螺旋插補等平面和空間軌跡控制要求。
支持開環、半閉環與全閉環控制下的相對/絕對運動、點動、用戶坐標系運動及多軸聯動等功能。
集成ABZ增量式與SSI/BissC絕對式編碼器反饋接口,支持步進半閉環/全閉環控制,同時支持雙反饋(電機端編碼器 + 光柵尺)閉環控制。

可通過RTSys IDE開發環境的API接口使用各種環境與上位機語言進行運動控制項目代碼的編程、測試、調試與配置。

(純國產IDE開發環境RTSys)

(可調用統一API函數庫進行開發)

正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
485瀏覽量
26061 -
光柵尺
+關注
關注
1文章
76瀏覽量
13701 -
步進驅動
+關注
關注
0文章
19瀏覽量
2173
發布評論請先 登錄
高精度步進電機驅動板設計:從細分到閉環的全鏈路優化
步進驅動為什么要采?外置光柵尺?


告別堆疊,一體驅動:TMCM-3110 三軸步進控制模塊

如何預防RE74光柵尺性能和作用
如何預防RE74光柵尺污染?
如何判斷光柵尺是否需要清潔?
RE74光柵尺常見故障及維修方法
RE74光柵尺是什么

6軸步進電機驅動+STM32F767+485+CAN+網口+12輸入輸出原理圖
步進的光柵尺全閉環EtherCAT運動控制器ZMC432CL-V2(四):LabVIEW編程調試




 工商網監
工商網監
評論