") DRV832x:三相智能柵極驅(qū)動器的技術(shù)剖析與應(yīng)用指南
DRV832x:三相智能柵極驅(qū)動器的技術(shù)剖析與應(yīng)用指南

DRV832x:三相智能柵極驅(qū)動器的技術(shù)剖析與應(yīng)用指南
在電子工程師的日常工作中,三相電機驅(qū)動應(yīng)用是一個常見且重要的領(lǐng)域。而德州儀器(TI)的DRV832x系列器件,作為集成式6至60V柵極驅(qū)動器,為三相電機驅(qū)動帶來了諸多優(yōu)勢。今天,我們就來深入探討一下DRV832x的技術(shù)特點、功能以及應(yīng)用設(shè)計。
文件下載:drv8323r.pdf
1. 器件概述
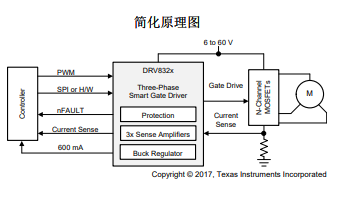
DRV832x系列器件集成了三個獨立的半橋柵極驅(qū)動器、電荷泵和線性穩(wěn)壓器,適用于三相電機驅(qū)動應(yīng)用。它不僅減少了系統(tǒng)組件數(shù)量、成本和復雜性,還集成了可選的三電流檢測放大器和600 - mA降壓穩(wěn)壓器。通過標準的串行外設(shè)接口(SPI)或硬件接口(H/W),可以輕松配置各種器件設(shè)置并讀取故障診斷信息。
2. 關(guān)鍵特性解讀
2.1 三相智能柵極驅(qū)動器
DRV832x集成了三個半橋柵極驅(qū)動器,能夠驅(qū)動外部N溝道高側(cè)和低側(cè)功率MOSFET。采用倍壓電荷泵為高側(cè)柵極驅(qū)動器提供電源,線性穩(wěn)壓器為低側(cè)柵極驅(qū)動器供電,支持100%占空比。智能柵極驅(qū)動架構(gòu)可動態(tài)調(diào)整柵極驅(qū)動輸出電流強度,控制功率MOSFET的VDS開關(guān)速度,減少外部元件數(shù)量。
2.2 多種PWM控制模式
DRV832x提供四種不同的PWM控制模式,以支持各種換向和控制方法:
- 6x PWM模式:每個半橋支持低、高或高阻抗三種輸出狀態(tài),由INHx和INLx信號控制。
- 3x PWM模式:INHx引腳控制半橋輸出,INLx引腳用于將半橋置于高阻抗狀態(tài)。
- 1x PWM模式:使用內(nèi)部存儲的6步塊換向表,通過一個PWM信號控制三相無刷直流(BLDC)電機,可配置為同步或異步整流。
- 獨立PWM模式:每個高側(cè)和低側(cè)柵極驅(qū)動器由相應(yīng)的輸入引腳獨立控制,適用于驅(qū)動不同的負載。
2.3 靈活的接口模式
支持SPI和硬件兩種接口模式,方便根據(jù)應(yīng)用需求選擇。SPI接口可實現(xiàn)更靈活的配置和詳細的故障信息讀取;硬件接口則通過外部電阻配置常見設(shè)置,無需SPI總線。
2.4 完善的保護功能
DRV832x具備多種保護功能,包括VM欠壓鎖定(UVLO)、VCP電荷泵欠壓鎖定(CPUV)、MOSFET VDS過流保護(VDS_OCP)、柵極驅(qū)動器短路檢測(GDF)和過溫警告與關(guān)斷(OTW/OTSD)等,確保器件在各種異常情況下的安全性。
3. 電氣特性分析
3.1 電源特性
- VM電源電流:在不同工作條件下,VM電源電流有所不同。例如,在VVM = 24V,ENABLE = 3.3V,INHx/INLx = 0V時,典型值為10.5mA;在睡眠模式下,典型值為12μA。
- DVDD穩(wěn)壓器電壓:在IDVDD = 0至30mA的負載范圍內(nèi),輸出電壓穩(wěn)定在3至3.6V之間,典型值為3.3V。
- VCP工作電壓:相對于VM的電壓,在不同VM電壓和負載電流下有不同的輸出,如VM = 13V,IVCP = 0至25mA時,典型值為11V。
3.2 邏輯輸入特性
邏輯輸入引腳(如CAL、ENABLE等)的輸入邏輯低電壓范圍為0至0.8V,輸入邏輯高電壓范圍為1.5至5.5V,具有100mV的輸入邏輯遲滯。
3.3 柵極驅(qū)動器特性
高側(cè)和低側(cè)柵極驅(qū)動器的輸出電壓和電流根據(jù)不同的工作條件進行調(diào)整。例如,高側(cè)平均柵極驅(qū)動電流(GHx)范圍為0至25mA,低側(cè)平均柵極驅(qū)動電流(GLx)范圍同樣為0至25mA。
3.4 保護電路特性
- VM欠壓鎖定:當VM電壓低于5.4至5.8V的閾值時,所有外部MOSFET禁用,nFAULT引腳拉低。
- VCP電荷泵欠壓鎖定:當VCP電壓低于VM + 2.8V的閾值時,觸發(fā)保護,可通過DIS_CPUV位禁用該功能。
- MOSFET VDS過流保護:根據(jù)OCP_MODE位的設(shè)置,可實現(xiàn)不同的過流保護模式,如鎖存關(guān)斷、自動重試等。
4. 應(yīng)用設(shè)計實例
4.1 典型應(yīng)用
以DRV8323R SPI器件為例,在三相BLDC電機控制應(yīng)用中,需要根據(jù)具體的設(shè)計要求進行參數(shù)配置:
- 外部MOSFET支持:根據(jù)電荷泵容量和PWM開關(guān)頻率,選擇合適的MOSFET。例如,在VM電壓為8V,IVCP = 15mA,最大PWM開關(guān)頻率為45kHz的情況下,采用梯形換向時,可支持Qg小于333nC的MOSFET;采用正弦換向時,可支持Qg小于111nC的MOSFET。
- IDRIVE配置:根據(jù)外部MOSFET的柵極 - 漏極電荷(Qg)和目標上升、下降時間,選擇合適的柵極驅(qū)動電流強度。例如,對于Qg為14nC,上升時間為100至300ns的情況,IDRIVEP可選擇在47mA至140mA之間;下降時間為50至150ns時,IDRIVEN可選擇在93mA至280mA之間。
- VDS過流監(jiān)測配置:根據(jù)最壞情況下的電機電流和外部MOSFET的RDS(on),設(shè)置VDS監(jiān)測閾值。例如,目標是在電流大于100A時觸發(fā)VDS監(jiān)測,對于CSD18536KCS MOSFET,最壞情況下的RDS(on)為2.88mΩ,計算得出VDS_OCP應(yīng)大于0.288V,可選擇0.31V。
- 感測放大器雙向配置:在雙向操作中,根據(jù)目標電流范圍、VREF電壓、感測電阻功率額定值和工作溫度范圍,選擇合適的增益設(shè)置和感測電阻值。例如,在VREF電壓為3.3V,感測電流為 - 40至 + 40A的系統(tǒng)中,計算得出增益設(shè)置應(yīng)選擇20V/V或40V/V,感測電阻值應(yīng)小于2.5mΩ。
4.2 替代應(yīng)用
在某些應(yīng)用中,可使用一個感測放大器進行單向求和電流檢測,常用于梯形或基于霍爾的BLDC換向控制。同樣需要根據(jù)具體的設(shè)計參數(shù),如目標電流范圍、VREF電壓、感測電阻功率額定值等,選擇合適的增益設(shè)置和感測電阻值。
5. 布局與設(shè)計建議
5.1 整體布局
- 電源旁路:使用低ESR陶瓷旁路電容器對VM引腳進行旁路,推薦值為0.1μF,并使用額定電壓為VM的大容量電容器進行旁路,容量至少為10μF。對DVDD引腳使用1μF的低ESR陶瓷電容器進行旁路,靠近引腳放置并盡量縮短到AGND引腳的路徑。
- 電荷泵和VCP電容:在CPL和CPH引腳之間放置47nF、額定電壓為VM的X5R或X7R陶瓷電容器,在VCP和VM引腳之間放置1μF、額定電壓為16V的X5R或X7R陶瓷電容器。
- 柵極驅(qū)動器環(huán)路:盡量減小高側(cè)和低側(cè)柵極驅(qū)動器的環(huán)路長度,確保準確的VDS感測。
5.2 降壓穩(wěn)壓器布局
- 反饋網(wǎng)絡(luò):將反饋網(wǎng)絡(luò)電阻靠近FB引腳放置,遠離電感器,以減少耦合噪聲。
- 輸入和輸出電容:將輸入旁路電容器靠近VIN引腳放置,輸出電容器靠近電感器和二極管的結(jié)點放置,以減少銅跡線電阻和電磁干擾。
6. 總結(jié)
DRV832x系列器件憑借其豐富的功能特性和靈活的配置方式,為三相電機驅(qū)動應(yīng)用提供了強大的支持。在實際設(shè)計中,電子工程師需要根據(jù)具體的應(yīng)用需求,合理選擇器件型號、配置參數(shù),并遵循布局設(shè)計建議,以確保系統(tǒng)的性能和可靠性。希望通過本文的介紹,能幫助大家更好地理解和應(yīng)用DRV832x系列器件。
大家在使用DRV832x的過程中遇到過哪些問題呢?或者對其應(yīng)用設(shè)計有什么獨特的見解?歡迎在評論區(qū)留言分享!
-
三相電機驅(qū)動
+關(guān)注
關(guān)注
0文章
10瀏覽量
1480
發(fā)布評論請先 登錄
基于DRV8353RH的三相智能柵極驅(qū)動器評估模塊電路該如何去設(shè)計?
基于DRV8320R的具有降壓穩(wěn)壓器的 60V 三相智能柵極驅(qū)動器
DRV832x系列三相智能柵極驅(qū)動器的數(shù)據(jù)手冊免費下載
DRV8300U三相智能柵極驅(qū)動器技術(shù)解析與應(yīng)用指南
DRV8328三相BLDC柵極驅(qū)動器技術(shù)解析與應(yīng)用指南
?DRV832x系列三相智能柵極驅(qū)動器技術(shù)文檔總結(jié)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論