 汽車級雙路柵極驅動器UCC21551x - Q1:設計與應用詳解
汽車級雙路柵極驅動器UCC21551x - Q1:設計與應用詳解

汽車級雙路柵極驅動器UCC21551x - Q1:設計與應用詳解
在電子工程師的日常工作中,柵極驅動器是驅動功率晶體管的重要組件。TI 推出的 UCC21551x - Q1 汽車級雙路柵極驅動器,以其高性能和高可靠性,在汽車及其他工業應用中備受關注。
文件下載:ucc21551-q1.pdf
關鍵特性與優勢
靈活的驅動配置
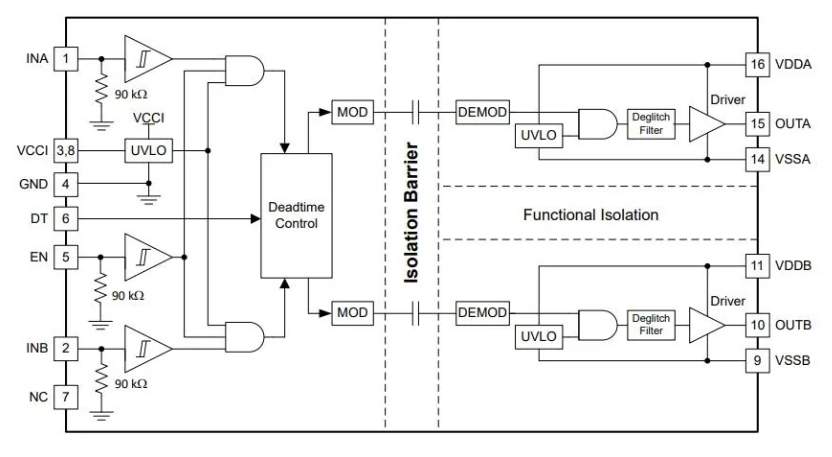
它具有通用的配置方式,可以是雙低側、雙高側或半橋驅動器。這種靈活性使得它能夠適配多種電源和電機驅動拓撲結構,例如可以用于驅動 SiC MOSFET 等多種類型的晶體管。比如在一些汽車的電機驅動系統中,不同的拓撲要求可能需要不同的驅動配置,UCC21551x - Q1 就能很好地滿足這些多樣化的需求。
高可靠性與穩定性
該驅動器通過了 AEC - Q100 認證,器件溫度等級為 1 級,結溫范圍在 - 40°C 到 + 150°C 之間,能夠適應汽車等惡劣環境下的工作要求。其共模瞬態抗擾度(CMTI)大于 125V/ns,這使得它在復雜的電磁環境中也能穩定工作,有效減少干擾對驅動信號的影響。
強大的輸出能力
具備高達 4A 峰值源電流和 6A 峰值灌電流的輸出能力,能夠快速地驅動功率晶體管,減少開關損耗,提高系統的效率和性能。這對于需要快速開關的功率轉換電路來說非常關鍵,例如在車載充電器和高壓 DC - DC 轉換器中,能夠實現高效的能量轉換。
完善的保護功能
- 欠壓鎖定(UVLO)保護:在 VDD 和 VCCI 引腳都有內部 UVLO 保護。當 VDD 偏置電壓低于啟動時的 (V{VDD_ON}) 或啟動后的 (V{VDD_OFF}) 時,VDD UVLO 功能會將受影響的輸出拉低,確保系統在電源異常時的安全。同樣,輸入側的 VCCI 也有 UVLO 保護,并且都具有遲滯特性,防止因電源噪聲引起的誤動作。
- 可編程死區時間(DT):用戶可以通過 DT 引腳靈活調整死區時間,避免上下管同時導通,防止“直通”現象的發生,提高系統的可靠性。例如,在半橋電路中,合理設置死區時間可以有效避免功率管的損壞。
引腳配置與功能
UCC21551x - Q1 有多種封裝形式,如 DW、DWK 和 DFJ。不同封裝的引腳配置有所不同,但主要引腳的功能是一致的。
使能引腳(EN)
通過將 EN 引腳設置為低電平(或浮空),可以同時關閉兩個輸出;將其拉高則驅動器正常工作。為了提高抗噪能力,建議在不使用時將該引腳連接到 VCCI,并使用 100pF - 1nF 的低 ESR/ESL 電容旁路。這在實際設計中,能夠有效減少外界干擾對驅動器使能信號的影響,確保系統的穩定運行。
可編程死區時間引腳(DT)
DT 引腳的配置方式決定了死區時間的設置。將 DT 引腳連接到 VCC 時,輸出完全匹配輸入,無死區時間;通過在 DT 和 GND 之間連接一個電阻 (R{DT}),可以根據公式 (t{DT}=8.6 × R_{DT}+13) 來編程死區時間。在實際應用中,根據不同的功率轉換電路要求,合理設置死區時間可以提高系統的效率和可靠性。
輸入引腳(INA、INB)
輸入引腳具有 TTL 和 CMOS 兼容的輸入閾值邏輯,與 VDD 電源電壓完全隔離。這使得它可以方便地與數字和模擬電源控制器接口,例如與 3.3V 的微控制器連接。同時,輸入引腳內部有下拉電阻,當輸入浮空時會將引腳拉低,但為了確保穩定性,建議在不使用時將輸入接地。
輸出引腳(OUTA、OUTB)
輸出引腳能夠提供 4A 峰值源電流和 6A 峰值灌電流脈沖,輸出電壓在 VDD 和 VSS 之間擺動,實現軌到軌操作。在輸出級的設計上,采用了特殊的結構,如在功率開關導通的米勒平臺區域,能夠提供更高的峰值源電流,實現快速導通。
設計與應用要點
輸入濾波器設計
為了過濾非理想布局或長 PCB 走線引入的振鈴,建議使用一個小的 (R{IN}-C{IN}) 濾波器。其中 (R{IN}) 的取值范圍為 0Ω 到 100Ω,(C{IN}) 為 10pF 到 100pF。但在選擇這些組件時,需要注意在良好的抗噪性和傳播延遲之間進行權衡。例如,較大的 (R{IN}) 和 (C{IN}) 可以提高抗噪能力,但會增加傳播延遲,影響系統的響應速度。
外部自舉二極管和串聯電阻選擇
自舉電容在低側晶體管導通時通過外部自舉二極管由 VDD 充電,這個過程涉及高尖峰電流,因此自舉二極管的選擇很關鍵。建議選擇高壓、快速恢復且正向壓降和結電容低的二極管,如 SiC 肖特基二極管,以減少反向恢復引入的損耗和接地噪聲反彈。同時,使用自舉電阻 (R_{BOOT}) 來限制涌入電流和電壓的上升斜率,其推薦值在 1Ω 到 20Ω 之間,具體根據所選二極管來確定。
柵極驅動器輸出電阻
外部柵極驅動器電阻 (R{ON}/R{OFF}) 用于限制寄生電感/電容引起的振鈴、高壓/大電流開關的 dv/dt 和 di/dt 以及體二極管反向恢復引起的振鈴,還可以微調柵極驅動強度,減少電磁干擾(EMI)。在實際設計中,需要根據具體的電路參數來計算和選擇合適的電阻值,以優化開關損耗和系統性能。
柵源電阻選擇
柵源電阻 (R{GS}) 用于在柵極驅動器輸出無電源且處于不確定狀態時,將柵極電壓拉低到源極電壓,降低因米勒電流引起的 dv/dt 導通風險。其典型值在 5.1kΩ 到 20kΩ 之間,具體根據功率器件的 (V{th}) 以及 (C{GD}) 與 (C{GS}) 的比值來確定。
功率損耗估算與散熱設計
柵極驅動器子系統的總損耗 (P{G}) 包括 UCC21551x - Q1 的功率損耗 (P{GD}) 和外圍電路的功率損耗。(P{GD}) 可以通過靜態功率損耗 (P{GDQ}) 和開關操作損耗 (P_{GDO}) 兩部分來估算。合理估算功率損耗有助于進行散熱設計,避免器件因過熱而損壞。在 PCB 布局上,可以通過增加與 VDDA、VDDB、VSSA 和 VSSB 引腳連接的銅面積,以及使用多個過孔將引腳連接到內部接地或電源平面等方式,來提高散熱效率,降低結溫。
死區時間設置
對于采用半橋的功率轉換拓撲結構,上下晶體管之間的死區時間設置非常重要,以防止動態開關過程中的“直通”現象。UCC21551x - Q1 的死區時間規范在電氣表格中定義為一個通道下降沿的 90% 到另一個通道上升沿的 10% 之間的時間間隔。但在實際的功率轉換系統中,死區時間的設置還需要考慮外部柵極驅動的導通/關斷電阻、直流母線開關電壓/電流以及負載晶體管的輸入電容等因素。可以根據公式 (DT{Setting}=DT{Req}+T{F{-}Sys}+T{R{-}sys}-T_{D(on)}) 來選擇合適的死區時間。
負偏置應用
當非理想的 PCB 布局和長封裝引腳引入寄生電感時,功率晶體管的柵源驅動電壓在高 di/dt 和 dv/dt 開關過程中可能會出現振鈴。為了避免振鈴超過閾值電壓導致意外導通甚至“直通”,可以在柵極驅動上施加負偏置。常見的實現方式有使用齊納二極管在隔離電源輸出級實現負偏置關斷、使用兩個電源或單輸入雙輸出電源實現正負極驅動電壓設置以及在柵極驅動回路中使用齊納二極管實現單電源負偏置等,但這些方法各有優缺點,需要根據具體的應用場景進行選擇。
總結
UCC21551x - Q1 汽車級雙路柵極驅動器憑借其靈活的配置、強大的輸出能力、完善的保護功能以及高可靠性,為汽車和工業應用中的功率轉換和電機驅動系統提供了一個優秀的解決方案。作為電子工程師,在設計中充分掌握其特性和應用要點,合理選擇和配置相關組件,能夠設計出高效、可靠的系統。同時,在實際應用中,還需要不斷進行測試和優化,以確保系統在各種工作條件下都能穩定運行。
各位工程師朋友們,在使用 UCC21551x - Q1 的過程中,你們遇到過哪些問題或有什么獨特的應用經驗呢?歡迎在評論區分享交流。
-
功率轉換
+關注
關注
0文章
87瀏覽量
13816
發布評論請先 登錄
汽車類 4A、6A 增強型隔離雙通道柵極驅動器UCC21551x-Q1數據表

4A、6A增強型隔離雙通道柵極驅動器UCC21551x數據表
UCC21551/UCC21551-Q1隔離式雙通道柵極驅動器技術解析與應用指南



 工商網監
工商網監
評論