 基于CW32的BLDC控制應用實例分析——換向檢測電路和其他功能性電路
基于CW32的BLDC控制應用實例分析——換向檢測電路和其他功能性電路

為獲得轉子當前位置,系統需要采用某種轉子位置檢測環節。在有位置傳感器的系統中,轉子位置的檢測是通過霍爾傳感器(HALL)來實現的,霍爾傳感器能夠感知轉子永磁磁極的位置。
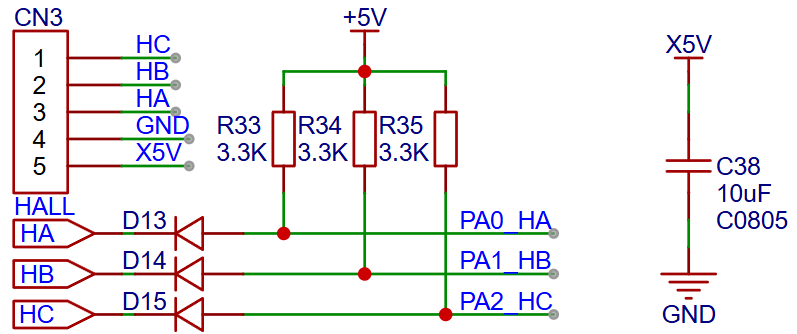
霍爾傳感器需要電源。電壓范圍可以是4V到24V(一般為5V)。所需電流范圍為5mA至15mA。設計控制器時,請參見相對應的電機的技術規范,了解霍爾傳感器所用的精確電壓和電流范圍。霍爾傳感器的輸出通常采用集電極開路類型。控制器端需要上拉電阻。
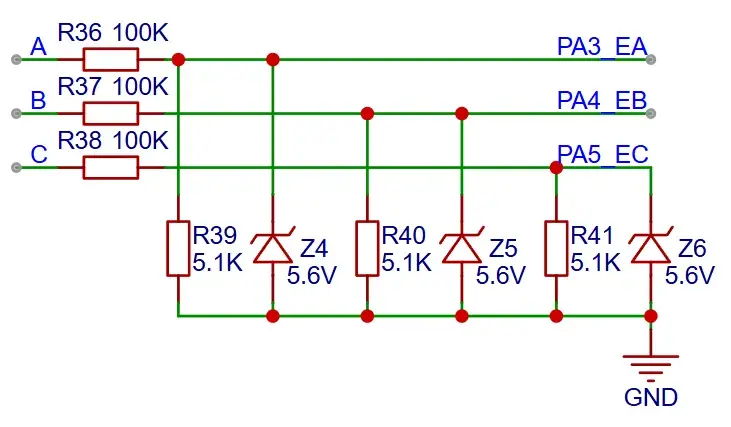
對于無位置傳感器的設計,則是通過檢測磁極何時從非導通相繞組下通過來獲取轉子位置信息。在每一個換相周期中,將有一相繞組處于不導通狀態,因此可檢測到轉子磁極從在該繞組經過的時刻。本設計以CW32L011的ADC同步觸發過零采樣比較為核心,通過反電勢電壓與VBUS電壓比較得到過零點的方法,來實現位置檢測。整個反電動勢過零點檢測的電路如下圖所示,主要功能依賴于MCU的ADC性能實現:
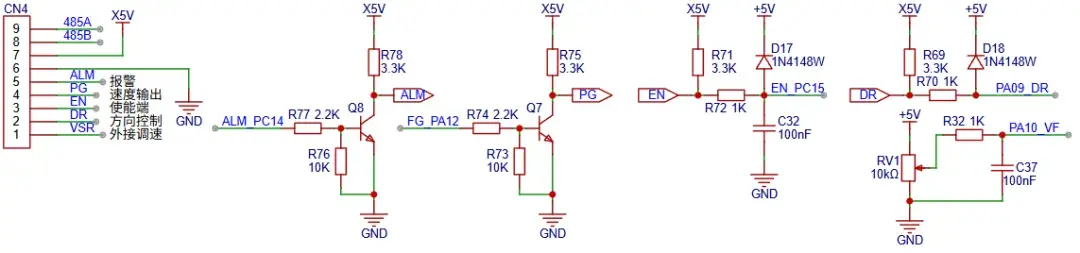
DR:電機運轉方向控制
正反轉方向控制端口。端口控制模式時,懸空或高電平時為正轉,低電平反轉。此信號需有5mA以上驅動吸收能力。
外部接線如下圖所示。
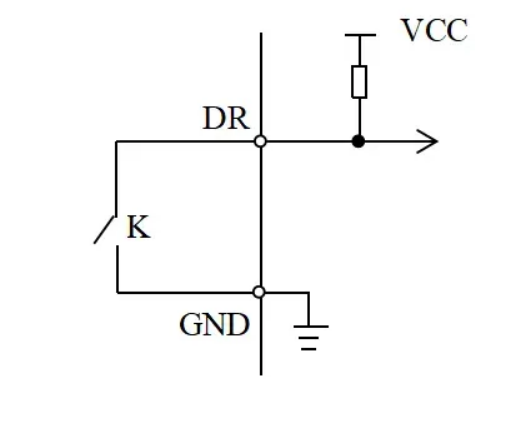
當K合上(DR為低電平),電機方向切換為反轉。當K斷開(DR為高電平),電機方向為正轉。
EN:使能信號。懸空時運行,接GND時停止運行
用戶可通過控制驅動器EN端子來控制電機的起動或停止(或剎車)。此信號需有5mA以上驅動吸收能力。
外部接線如下圖所示。
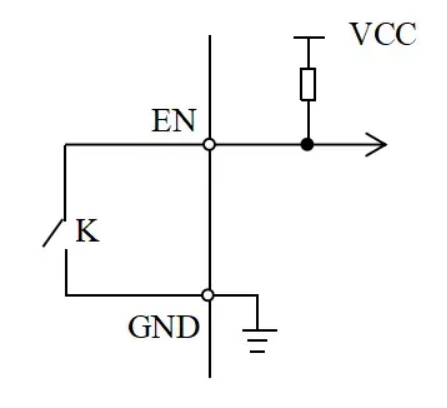
當K合上(EN為低電平),電機停止運行。當K斷開(EN為高電平),電機啟動運行。
PG:電機轉速反饋輸出
速度反饋信號。 此信號與電機轉速成正比,PG頻率與霍爾換相頻率正成比。
ALM:預留報警、故障信號輸出接口
RV1:為板載電位器調速

VE(VSR):外部調速信號輸入
外接調速信號輸入。
支持外接10K電位器或模擬電壓調速。當外接電位器時,VE對應電位器中間腳,5V、GND對應連接電位器的兩邊腳。電路設計使用LMV321做跟隨器。
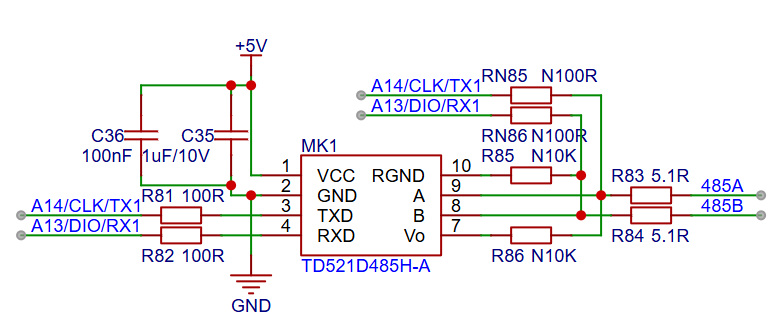
485A,485B:預留485或串口通訊接口,工業485設計,使用專門模塊,提升可靠性與可用性。
-
傳感器
+關注
關注
2576文章
55028瀏覽量
791223 -
電機控制
+關注
關注
3600文章
2131瀏覽量
277674 -
位置檢測
+關注
關注
0文章
27瀏覽量
8187 -
CW32
+關注
關注
1文章
299瀏覽量
1843
發布評論請先 登錄
基于CW32的門禁綜合系統

【應用筆記】CW32 電容式觸摸按鍵設計指南


CW32時鐘運行中失效檢測的流程是什么?CW32時鐘運行中失效檢測注意事項有哪些呢?
CW32單片機如何讓生活更便捷
基于武漢芯源半導體CW32的無刷電機訓練營正式結營!
CW32電容式觸摸按鍵設計指南
cw32和stm32的區別

基于CW32的BLDC控制應用實例分析——I/O分配及主控電路設計
基于CW32的BLDC控制應用實例分析——電源系統設計

基于CW32的BLDC/FOC控制應用實例分析——三相電流采樣電路設計



 工商網監
工商網監
評論