 深度解析混頻器群時延
深度解析混頻器群時延

在聊混頻器群時延之前,我們先聊一聊群時延。
在射頻微波領域,群時延是一個經常可以看到的概念,它表示電磁波通過一個器件或者說一個系統的傳輸時間。對于信號傳輸來說,這個概念非常重要。單一的連續波信號是無法傳輸信息的。能傳遞信息的一定是由不同頻率分量組成的一個“群”信號。如果這個群中各個頻率分量的信號通過一個系統的時間不一樣,那么這個系統輸出的信號群包絡就會發生畸變。這有點像田徑比賽中的百米飛人大戰:在起跑線上,大家排成一排,整整齊齊的;到了終點沖線的時候就變成有先有后,隊形全亂套了。對于百米飛人大戰,這樣的結果當然是讓人心潮澎湃,非常過癮。但要是信號也是這樣,那對通信系統來說可是大大的不妙。我們希望所有人到終點時還能保持隊形,就像閱兵式上,方隊中每個人的速度都一致,在起點和終點,方隊的隊形也是一樣的。
我們看一下圖1的例子:輸入信號有三個頻率分量(紅線),頻率分別是基波頻率fo,二次諧波頻率2fo和三次諧波頻率3fo,他們組成的信號包絡(藍線)近似于一個方波。再來看輸出信號,由于這三個頻率的傳輸速度不一樣,在輸出端,頻率還是這三個頻率,但包絡已經發生了嚴重的畸變。這樣的畸變會給通訊系統帶來很多麻煩。
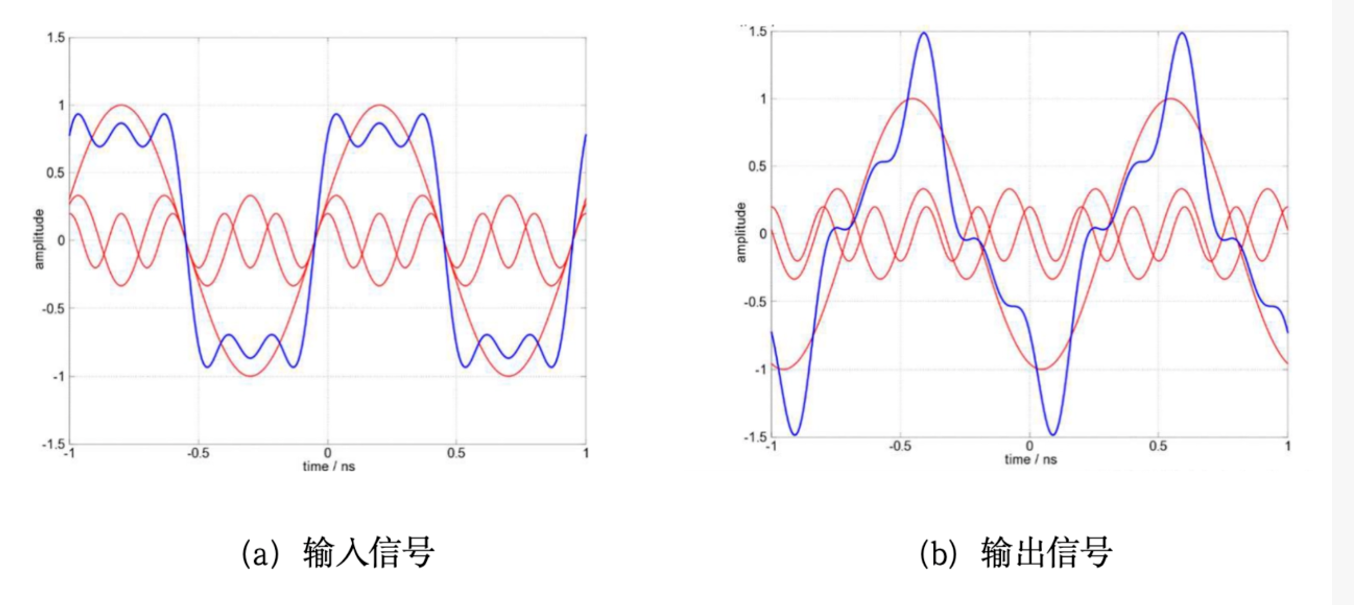
圖1一個方波信號,因為不同頻率傳輸的速度不一致,信號發生了畸變
一個理想的傳輸系統,我們希望輸出的信號包絡和輸人的信號包絡是一致的,這樣的系統我們稱為無失真傳輸系統。在《信號與系統》這門課上我們學過,一個無失真傳輸系統需要滿足兩個條件:
·系統的幅頻特性在整個頻域范圍內應為常數
·系統的相頻特性在整個頻率范圍內群時延恒定
翻譯成“人話”就是:
·對于信號中所有的頻率分量,要放大就都放大相同的倍數:要衰減也都衰減相同的倍數,別有的大有的小。
·對于信號中所有的頻率分量,通過系統的時間要一致,別有的快有的慢。所以,我們需要測量每個頻率分量通過系統的時間,也就是該頻率的群時延Tg。
Tg是一個實數,幾乎所有的教科書上都是直接給出了它的定義式:
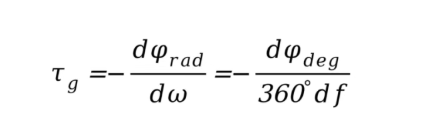
不知道小伙伴們怎么樣,反正當初的我看到這個定義式是一頭霧水:為啥相位對頻率的微分就是群時延?為了更好的理解這個定義式,我們從一個例子人手。還是圖1中的例子,要想知道信號包絡是否發生了畸變,就要分別測出fo、2fo和3fo的群時延,然后看它們是否相等。先來測量fo的群時延。假設我們的被測件是一段同軸線,該如何測量呢?
反正我能想到的最簡單的辦法是直接掏出卷尺,把同軸線授直了量長度,然后根據同軸線填充介質的介電常數,計算fo信號在這根線中的傳輸速度,然后做個除法。從原理上來看,這種方法似乎沒問題,但是工程上問題很大:首先用尺子測量長度的精度(更準確的表述是測量不確定度)很差,再加上介電常數的不確定度也很差,所以這種方法的精度并不高。更何況被測件往往不是均勻的,還需要分段計算。
第二種方法要高大上很多:將調制后的fo信號輸入把被測件,然后測量輸人輸出信號包絡的時間差,就可以測量出傳輸時間。
從原理上看也沒問題,而且這樣調制后的信號包絡,更符合“群”的概念。早期的工程師也確實是這么測的,缺點就是這個系統搭起來略顯復雜,我們在后面會討論一種類似的方法。
熟悉矢量網絡分析儀的小伙伴還會想到時域測試的方法。確實,無論是使用時域反射(TDR)還是時域傳輸(TDT),都可以進行這個測量,但同樣存在問題:矢量網絡分析儀的時域測量精度(時域分辨率)跟測量的最高工作頻率有關,最高工作頻率越高,時域分辨率越高,如果測量一個窄帶器件,這種方法的精度并不高。更重要的是,我們測得的這個時間,嚴格的說是所有頻率分量構成的信號包絡的傳輸時間,而不是我們想知道的某個特定頻率fo信號的傳輸時間。
所以我們最終還是回到相位測量上來。首先我們假設信號通過這段同軸線的時間,也就是群時延為Tg,而對于頻率為fo的電磁波,一個周期為To=1/fo。知道了時延Tg,就可以計算出這段同軸線上傳輸時經過了多少個周期,也就能計算出輸入輸出信號的相位差。比如對于fo=1GHz的電磁波,其周期為1ns;如果被測同軸線的群時延Tg=0.25ns,那么可以計算出在這段同軸線上有1/4個周期,也就是輸出信號的相位會比輸人信號的相位延遲90°,S21的相位為-90°。所以,如果已知了Tg,是可以準確的計算出S21的相位的。那么反過來,如果用矢量網絡分析儀測量到了S21的相位,能否計算出群時延Tg呢?沒那么簡單。熟悉矢量網絡分析儀的同學都知道,S參數的相位測量都存在360°的模糊,即使是非折疊相位(Unwrap phase)也不例外。也就是說S21的相位測量值如果是-90°,那么其真正的相位有可能是-90°、-450°、-810°…….,由此計算出來的時延Tg分別為0.25ns、1.25ns、2.25ns…。因此,如果我們只測量一個頻點的相位是無法得到準確的時延Tg的。
我們再用跑步做例子,只不過從剛才的百米飛人大戰變成了長跑。一個運動員沿著標準的四百米跑道,以恒定的速度跑步。如果我們沒有從頭看比賽,僅僅根據他現在的位置,是無法知道他已經跑了多少圈的(距離模糊),也就無法知道他跑了多長時間。如何解決呢?既然一個人跑會出現距離模糊,那我們就給他加一個小伙伴。四百米的田徑場上有多條跑道,由于圓周的關系,每條跑道一圈的長度并不相等。最內圈的跑道一圈是400米,相鄰的第二條跑道一圈就是405米(并不準確,大家領會精神)。我們讓兩個運動員同時出發,以相同的速度跑,一個沿著400米一圈的跑道跑,另一個人沿著405米一圈的跑道跑。那么只要圈數不是特別多,我們就可以通過他們兩的位置差來準確的判斷出他們已經跑了幾圈,從而解決了距離模糊的問題。
我們再回到群時延的測試中。同理,既然只測一個頻點f1無法解決相位模糊,那我們也給它加一個小伙伴f2,只要這個小伙伴的頻率跟他的頻率差足夠小,我們就可以認為他們的群時延Tg是一樣的(兩個運動員的速度是一樣的)。頻率不一樣對應了他們的周期不一樣(一個每圈400米,另一個每圈405米),所以我們會得到兩個不同的S21相位S211和S212,根據S21相位的相位差△和頻率差△f,我們就可以解決相位模糊問題,準確的計算出群時延Tg了。詳細的推導在附錄A中,沒興趣的小伙伴直接忽略就好。
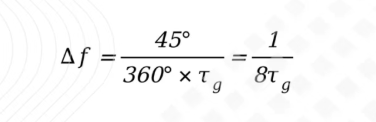
嚴格的說,對于色散(不同頻率的電磁波傳播速度不相等)的系統,f1的時延Tg1并不等于f2的時延Tg2。我們用這種方法計算得到的時延實際上是Tg1和Tg2的平均值。在定義式中,為了數學上的嚴謹,讓f1與f2的頻率差△f→0,于是相位差△p變成了dp,而頻率差△f變成了df。但這也給當年的我帶來了很大的困惑:既然這個時延是單一頻點的時延,為啥要叫“群”時延呢?從上面的過程可以看出,單一的頻點是無法通過相位的方法測出時延的,一定要有至少一個額外的頻點跟它一起構成“群”后,才能測出這個信號群的平均時延。我們把它定義為這個頻點時延,是數學上取△f→0的結果。小伙伴們也可以這樣理解:一個頻率點的“群時延”是以這個頻率為中心的一個無窮窄帶信號構成的“群”的時延。顯然在工程上是無法測得這個嚴格數學意義上的群時延的,工程上是使用兩個相鄰的頻點來計算群時延。這個頻率差△f不能太大,否則會使相位差△p超過180°,再次出現模糊。有時候群時延會測出負值,那很可能就是△f太大引起的。工程上一般要求選取的△f對應的I△pl≤45°。測試前,應該估算一下被測件的群時延,然后可以根據附錄B中的公式來計算△f的最大值。如果無法估計被測件的群時延,我們可以嘗試用不同的△f來測試,看看群時延結果有沒有巨大的變化。
△f也不是越小越好,相位測量也是有不確定度的。△f越小,群時延的不確定度就越大。舉個例子,△f=1MHz時△=18°±0.5°,計算出來的群時延Tg=50±1.4ns;而△f=2MHz時△p=36°±0.5°,計算出來的群時延Tg=50±0.7ns。可以看出,相同的相位差不確定度條件下,△f越小,群時延的不確定度就越大。實際測試中也是這樣,△f太小時,群時延曲線的噪聲就比較大。
工程上通常使用矢量網絡分析儀來測量群時延,R&S公司全系列的矢量網絡分析儀都標配了群時延測試功能。矢量網絡分析儀通過掃頻,測量S21的相位,再通過相鄰點的相位差和頻率差計算群時延。在這個過程中,矢量網絡分析儀是在一些離散的頻點上進行測量的,線性掃頻時頻點的間距,也就是頻率步長fstep可由下試計算。
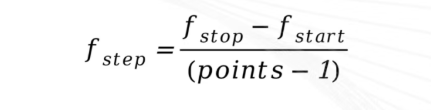
式中fstart為掃描的起始頻率,fstop為掃描的終止頻率,points為掃描點數。
除此之外還有一個參數“Aperture”(孔徑),這個參數用于調整△f的大小,Aperture就是告訴矢量網絡分析儀,計算群時延時,△f應為頻率步長(fstep)的幾倍,即△f=Aperture×fstep°。
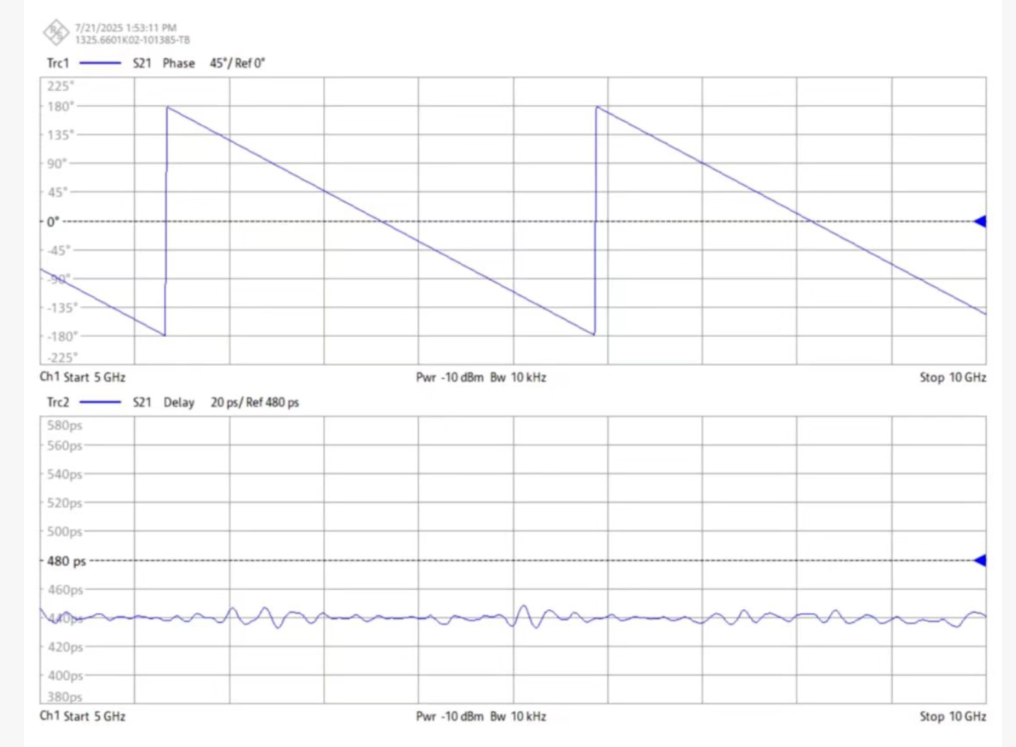
圖2矢量網絡分析儀測量S21的相位和群時延
除了使用矢量網絡分析儀,信號源和頻譜分析儀也能測量。R&SFSW提供了“多載波群時延測量”選件(R&SFSW-K17)。它的測試原理是由矢量信號源產生多個載波信號,載波信號的間隔就是Af,然后利用頻譜分析儀測量輸入的多載波信號相位差和輸出的多載波相位差,來計算群時延。這個方法跟前面說的,用調制信號來測量群時延很類似,只不過不是直接測量信號包絡的時間差,而是測量多載波之間的相位差。
技術細節可以參考應用手冊:《Group Delay measurements with Signaland Spectrum Analyzers》
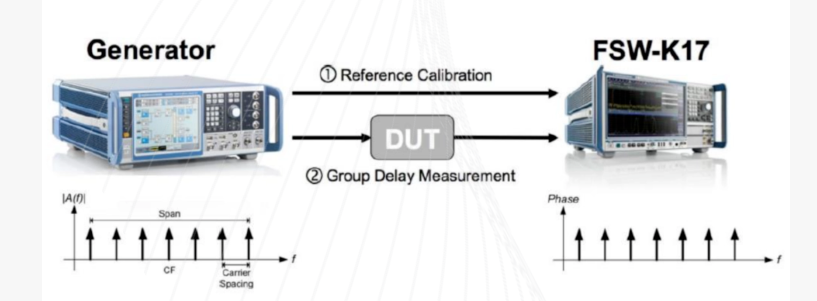
圖3R&SFSW-K17多載波群時延測量
總結一下:
·一個頻率的群時延Tg是該頻率下傳輸系數相位相對于頻率的變化率(導數)。
·一個頻率的群時延Tg反映了以該頻點為中心的無窮窄帶寬內信號“群”包絡通過被測件所需要的時間。
·一個頻段內的群時延變化反映了被測件的相頻響應是否是線性的,一個理想的線性器件,相頻響應是線性的,也就是群時延Tg恒定。
·群時延可以通過掃頻測量相位的方法得到,也可以通過比較雙/多載波信號的相位得到。
現在讓我們回到本文的標題:聊一聊混頻器群時延。
混頻器大家都很熟悉,現代的無線接收機中幾乎都少不了混頻器,它負責把射頻信號搬移到中頻。對于接收機來說,信號是從射頻(RF)端口輸入,從中頻(IF)端口輸出的。
很顯然,從信號進入RF端口,再從IF端口輸出,一定是需要時間的。我們要聊的混頻器群時延就是指這個時間。之前討論的信號無失真傳輸條件,對于混頻器也同樣適用。要想信號無失真的通過混頻器,混頻器的群時延在信號頻帶內也應該恒定。
有了之前的基礎,我們很容易想到,可以用RF→IF的變頻相位的導數(斜率)來計算混頻器的群時延Tg。但是由于混頻器的輸入輸出信號的頻率是不同的,要比較RF一IF的變頻相位,我們必須明確比較的時間點。這就要求矢量網絡分析儀的射頻源和本振源是相位相關的。在R&SZNA系列矢量網絡分析儀中,采用了DDS(直接數字頻綜)作為參考源,可以保證矢量網絡分析儀多個射頻源以及內部接收機的本振源在不同頻率上的實現相位相關。
需要注意的是,從RF端口到IF的變頻相位還與本振(LO)信號的有關,LO信號的頻率和相位一旦發生變化,整個信道(從RF端口到IF端口)的狀態都會發生變化,因此在測量混頻器的群時延時,需要固定LO信號頻率,掃描RF信號頻率和IF信號頻率來測量。
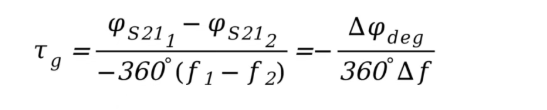
通過測量變頻相位的方法來測量混頻器的群時延,由于f1和f2信號是在不同時刻輸人被測件的,我們不僅要固定住混頻器LO信號的頻率,還要保證這個LO信號與輸人混頻器的RF信號始終相位相關。否則,LO信號在這兩個時刻的相位抖動,會造成群時延的結果失去意義。這就要求被測混頻器的RF信號和LO信號都由R&SZNA矢量網絡分析儀提供。
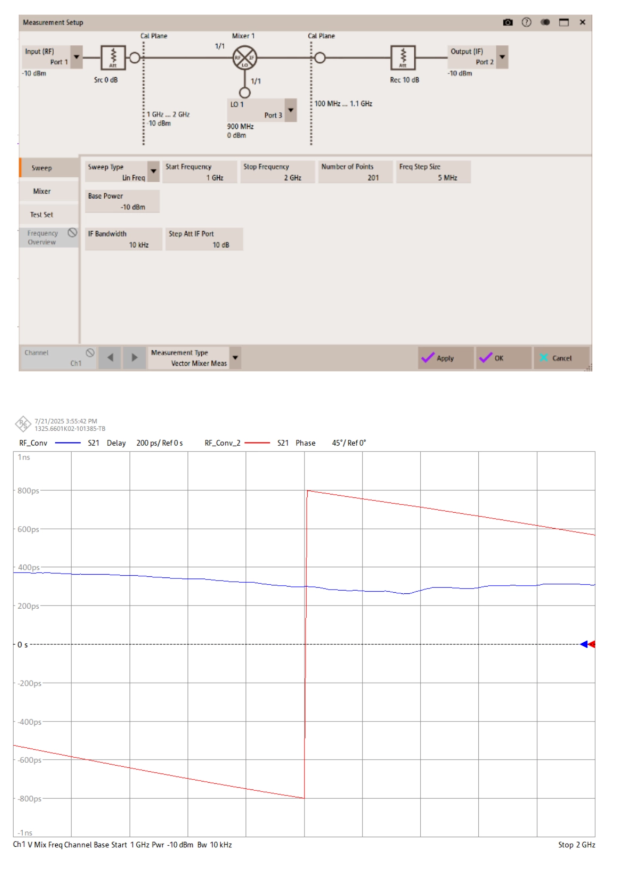
圖4使用R&SZNA-K5、R&SZNA-K6選件測量變頻相位和時延
很多被測混頻器的LO信號是內嵌的,并沒有外部LO信號的輸人接口。此時,由于LO信號無法與射頻信號相位相關,上述的方法是不能使用的。針對這一類的測試,可以使用“內嵌本振變頻器時延測試”選件(R&SZNA-K9)。這種方法的基本思路是:既然混頻器LO信號的相位不可控,我們就把它的影響抵消掉。在前面的掃頻方法中,兩個不同頻率的RF信號是在不同時刻輸入的,需要嚴格控制LO信號的相位;而使用R&SZNA-K9方法時,兩個不同頻率的RF信號同時輸入,LO信號的相位抖動對這個RF信號的影響是一致的在計算相位差時,LO信號的相位影響被抵消掉了。我們分別測量出兩個RF信號的相位差△RF=RF1-RF2和兩個IF信號的相位差△IF=IF1-IF2,就可以得到變相相位的相位差△。再計算變頻的群時延就簡單了。這兩個RF信號的頻率差就是Af。這種測試方法實際上就是我們之前提到的雙/多載波信號的測試方法。更詳細的理論推導可以參考R&S的應用手冊《Group Delay Measurement on Frequency Converting Devices》。
這個測試至少需要同時產生兩個激勵信號,因此矢量網絡分析儀至少有兩個獨立可控的射頻源,同時為了簡化測試系統,需要在矢量網絡分析儀中內置信號合路器,R&SZNA矢量網絡分析儀提供了所有需要的選件。當然,沒有內置合路器選件時使用外置合路器也是可以的。
需要說明的是,采用這種方法測量變頻群時延時,需要一個已知群時延的混頻器用于校準。通常是找一個可以外接LO信號的混頻器,先用R&S ZNA-K5方法測量其群時延,再用這個混頻器校準系統。
討論了半天群時延以及混頻器群時延,也不知道我給大家講清楚了沒有。如果各位小伙伴還有問題,歡迎和我們討論,也歡迎咨詢R&S公司的應用工程師。
附錄A:群時延公式的推導
電磁波的頻率f表示一秒鐘會振蕩多少個周期,時延Tg乘以頻率f就可以得到輸出信號比輸入信號延遲了多少周期。由于有每延遲一個周期相位延遲360°,所以Tg×f×-360°就可以計算出輸出信號延遲的相位。
我們考慮有兩個不同頻率的電磁波,頻率分別為f1和f2,它們的時延Tg是一樣的(未知),我們分別測量出這兩個頻率下S21的相位S211和S212,可以得到:
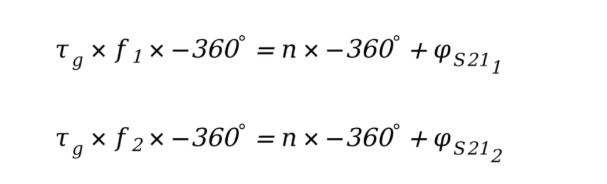
兩個式子減一下,就可以得到:
舉個例子:我們已經測得了f1=1GHz(周期T=1ns)處S21的相位為-90°,可能的時延Tg有:0.25ns、1.25ns、2.25ns.…,為了確定時延Tg,我們還需要一個相鄰頻點的相位,假設這個頻率為f2=1.01GHz,那么我們可以得到不同的時延Tg下,f1和f2的S21的相位S211和S212。
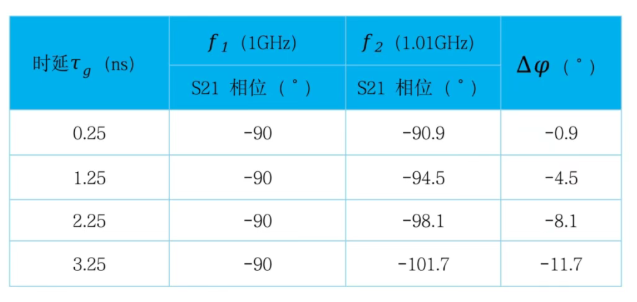
由此我們可以確定群時延Tg。
這兩個頻率的電磁波構成了一個“群”,我們實際計算的是這個“群”包絡通過器件的時間,這也就是“群時延”這個名稱的來源。當頻率差趨近于無窮小時,差分變成了微分:

附錄B:估算方法
工程上一般選擇dp在45°以內。如果我們有被測件大致的群時延Tg值,△f最大值可以用以下方法來估算。
羅德與施瓦茨業務涵蓋測試測量、技術系統、網絡與網絡安全,致力于打造一個更加安全、互聯的世界。 成立 90 多年來,羅德與施瓦茨作為全球科技集團,通過發展尖端技術,不斷突破技術界限。公司領先的產品和解決方案賦能眾多行業客戶,助其獲得數字技術領導力。羅德與施瓦茨總部位于德國慕尼黑,作為一家私有企業,公司在全球范圍內獨立、長期、可持續地開展業務。
-
混頻器
+關注
關注
10文章
863瀏覽量
49891 -
射頻微波
+關注
關注
0文章
126瀏覽量
11022 -
群時延
+關注
關注
0文章
5瀏覽量
8601 -
羅德與施瓦茨
+關注
關注
10文章
677瀏覽量
47515
原文標題:【技術科普】聊一聊混頻器群時延
文章出處:【微信號:羅德與施瓦茨中國,微信公眾號:羅德與施瓦茨中國】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
混頻器
集成RF混頻器與無源混頻器方案的性能比較
混頻器的作用和混頻器原理分別是什么?
雙平衡混頻器,雙平衡混頻器原理及其結構簡介
單平衡混頻器,單平衡混頻器的特點和原理是什么?
矢量網絡分析儀:從群時延到混頻器測試的核心工具




 工商網監
工商網監
評論