 ECM50-A07工控機的智慧農業精準灌溉系統工作原理及方案部署詳解
ECM50-A07工控機的智慧農業精準灌溉系統工作原理及方案部署詳解

一、工作流程詳細設計
1、數據采集流程
# ECM50-A07 數據采集核心邏輯(MicroPython示例)importmachineimporttimefromlora importLoRafrommodbus importModbusRTU
def__init__(self):
# 初始化LoRa模塊
self.lora = LoRa(
frequency=433000000, # 433MHz頻段
bandwidth=500000, # 500kHz帶寬
sf=7, # 擴頻因子
coding_rate=5# 編碼率
)
self.modbus = ModbusRTU(
uart=machine.UART(1, baudrate=9600),
pins=('GPIO17', 'GPIO16') # TX, RX
)
# 初始化模擬量輸入
self.adc1 = machine.ADC(machine.Pin(34)) # AI1
self.adc2 = machine.ADC(machine.Pin(35)) # AI2
# 傳感器數據緩沖區
self.sensor_data = {
'soil_moisture': [], # 土壤濕度(%)
'soil_temperature': [], # 土壤溫度(℃)
'air_temperature': [], # 空氣溫度(℃)
'air_humidity': [], # 空氣濕度(%)
'rainfall': 0, # 降雨量(mm)
'water_level': 0, # 水位(m)
}
defcollect_lora_data(self):
"""采集LoRa傳感器數據"""
# 輪詢所有LoRa節點
fornode_id inself.lora_nodes:
# 發送數據請求
self.lora.send(f"REQ:{node_id}")
# 等待響應(帶超時)
start_time = time.time()
whiletime.time() - start_time < 2: ?# 2秒超時
ifself.lora.available():
data = self.lora.receive()
ifdata.startswith(f"DATA:{node_id}"):
# 解析傳感器數據
self._parse_sensor_data(node_id, data)
break
defcollect_ai_data(self):
"""采集模擬量傳感器數據"""
# 讀取水位傳感器(4-20mA轉電壓)
adc_value1 = self.adc1.read()
voltage1 = (adc_value1 / 4095) * 3.3# ESP32 ADC參考電壓3.3V
# 4-20mA轉實際水位(假設量程0-5米)
# 4mA對應0米,20mA對應5米
current1 = (voltage1 / 120) * 1000# 假設使用120Ω采樣電阻
if4<= current1 <= 20:
water_level = (current1 - 4) * (5/ 16) # 5米量程
self.sensor_data['water_level'] = water_level
# 讀取第二個AI通道(可接土壤EC值傳感器)
adc_value2 = self.adc2.read()
# ... 類似處理邏輯
defrun_collection_cycle(self):
"""執行完整的數據采集周期"""
# 步驟1:采集LoRa傳感器數據
self.collect_lora_data()
# 步驟2:采集RS485氣象站數據
self.collect_weather_data()
# 步驟3:采集模擬量傳感器
self.collect_ai_data()
# 步驟4:采集數字量狀態
self.check_di_status()
returnself.sensor_data
2、智能決策引擎
灌溉決策算法:
classIrrigationDecision:
def__init__(self, config):
self.config = config # 灌溉策略配置
self.history = [] # 歷史決策記錄
defmake_decision(self, sensor_data, weather_forecast):
"""核心決策函數"""
decision = {
'need_irrigation': False,
'valve_id': None,
'duration': 0,
'water_amount': 0,
'fertilizer': False,
'reason': ''
}
# 1. 基于土壤濕度的決策
soil_moisture = sensor_data.get('soil_moisture', [])
ifsoil_moisture:
avg_moisture = sum(soil_moisture) / len(soil_moisture)
# 獲取作物適宜濕度范圍
crop_config = self.config['crops'].get(sensor_data['crop_type'], {})
min_moisture = crop_config.get('min_moisture', 30)
ifavg_moisture < min_moisture:
decision['need_irrigation'] = True
decision['reason'] = f'土壤濕度低于閾值({avg_moisture:.1f}% < {min_moisture}%)'
# 計算灌溉量(基于水分虧缺模型)
deficit = min_moisture - avg_moisture
decision['water_amount'] = self._calculate_water_amount(
deficit,
sensor_data['soil_type'],
sensor_data['crop_stage']
)
# 2. 考慮天氣預報(避免灌溉后立即下雨)
ifweather_forecast.get('rain_probability', 0) > 70:
ifdecision['need_irrigation']:
# 如果預報有雨,減少灌溉量或推遲灌溉
decision['water_amount'] *= 0.5
decision['reason'] += ' | 降雨概率高,減少灌溉量'
# 3. 考慮蒸發蒸騰量(ET0)
et0 = self._calculate_et0(
sensor_data['air_temperature'],
sensor_data['air_humidity'],
sensor_data['solar_radiation'],
sensor_data['wind_speed']
)
# 作物系數法計算作物需水量
crop_water_needed = et0 * crop_config.get('kc_factor', 0.8)
ifcrop_water_needed > 0:
decision['water_amount'] = max(decision['water_amount'], crop_water_needed)
# 4. 決策優化(考慮灌溉效率)
ifdecision['water_amount'] > 0:
decision['duration'] = self._calculate_irrigation_duration(
decision['water_amount'],
self.config['valve_flow_rate']
)
# 選擇最優閥門(基于分區優先級)
decision['valve_id'] = self._select_valve(sensor_data['zone_priority'])
returndecision
def_calculate_water_amount(self, deficit, soil_type, crop_stage):
"""計算灌溉水量(mm)"""
# 土壤持水能力參數
soil_params = {
'sand': {'field_capacity': 12, 'wilting_point': 4},
'loam': {'field_capacity': 28, 'wilting_point': 12},
'clay': {'field_capacity': 35, 'wilting_point': 18},
}
# 作物生長階段系數
stage_coeff = {
'seedling': 0.4,
'vegetative': 0.7,
'flowering': 1.0,
'fruiting': 0.9,
'mature': 0.5,
}
soil = soil_params.get(soil_type, soil_params['loam'])
available_water = soil['field_capacity'] - soil['wilting_point']
# 灌溉量 = 水分虧缺量 × 根系深度 × 階段系數
root_depth = self.config['root_depth'].get(crop_stage, 0.3) # 默認0.3m
stage_factor = stage_coeff.get(crop_stage, 1.0)
# 轉換為毫米(1mm = 1L/m2)
water_mm = deficit * available_water * root_depth * 1000* stage_factor
returnmax(water_mm, 0)
3、設備控制流程
classIrrigationController:
def__init__(self):
# 初始化DO控制引腳
self.valve1 = machine.Pin(12, machine.Pin.OUT) # 電磁閥1
self.valve2 = machine.Pin(13, machine.Pin.OUT) # 電磁閥2
self.pump = machine.Pin(14, machine.Pin.OUT) # 水泵
# 初始化DI監測引腳
self.pump_status = machine.Pin(25, machine.Pin.IN) # 水泵狀態反饋
self.valve_feedback = machine.Pin(26, machine.Pin.IN) # 閥門反饋
# 控制狀態
self.status = {
'valve1': False,
'valve2': False,
'pump': False,
'last_irrigation': None,
'total_water_used': 0,
}
defexecute_irrigation(self, decision):
"""執行灌溉控制"""
ifnotdecision['need_irrigation']:
return{'success': True, 'message': '無需灌溉'}
try:
# 1. 啟動水泵(先開水泵,后開閥門)
self._start_pump()
time.sleep(2) # 等待水泵穩定
# 2. 開啟指定閥門
valve_map = {1: self.valve1, 2: self.valve2}
valve_pin = valve_map.get(decision['valve_id'], self.valve1)
valve_pin.value(1)
# 3. 開始計時灌溉
start_time = time.time()
irrigation_duration = decision['duration'] * 60# 轉為秒
# 4. 灌溉過程監控
while(time.time() - start_time) < irrigation_duration:
# 實時監測設備狀態
ifnotself._check_device_status():
self._emergency_stop()
return{'success': False, 'message': '設備故障'}
# 計算已用水量
flow_rate = self.config['valve_flow_rate'] # L/min
elapsed_min = (time.time() - start_time) / 60
self.status['total_water_used'] = flow_rate * elapsed_min
time.sleep(1) # 每秒檢查一次
# 5. 灌溉結束(先關閥門,后關水泵)
valve_pin.value(0)
time.sleep(1)
self._stop_pump()
# 6. 記錄灌溉日志
self._log_irrigation(decision)
return{
'success': True,
'water_used': self.status['total_water_used'],
'duration': irrigation_duration / 60,
}
exceptException ase:
self._emergency_stop()
return{'success': False, 'message': str(e)}
def_emergency_stop(self):
"""緊急停止所有設備"""
self.valve1.value(0)
self.valve2.value(0)
self.pump.value(0)
4、數據上報與云平臺集成
MQTT數據上報協議:
classCloudConnector:
def__init__(self):
self.mqtt_client = None
self.last_upload = 0
self.data_buffer = []
# MQTT配置
self.config = {
'server': 'mqtt.ebytecloud.com',
'port': 1883,
'client_id': 'ecm50_a07_'+ self._get_device_id(),
'username': 'device',
'password': '加密的設備密鑰',
'topics': {
'data': 'agriculture/irrigation/data',
'control': 'agriculture/irrigation/control',
'status': 'agriculture/irrigation/status',
'alarm': 'agriculture/irrigation/alarm',
}
}
defupload_data(self, sensor_data, irrigation_log):
"""上傳數據到云平臺"""
# 構建標準數據格式
payload = {
'device_id': self.config['client_id'],
'timestamp': time.time(),
'location': self._get_gps_coordinates(),
'sensors': sensor_data,
'irrigation': irrigation_log,
'battery': self._get_battery_level(),
'signal_strength': self._get_signal_strength(),
}
# 數據壓縮和加密
compressed = self._compress_data(payload)
encrypted = self._encrypt_data(compressed)
# MQTT發布
try:
self.mqtt_client.publish(
self.config['topics']['data'],
encrypted,
qos=1, # 至少送達一次
retain=False
)
returnTrue
except:
# 網絡異常,數據暫存本地
self._store_locally(payload)
returnFalse
defreceive_control_command(self):
"""接收云端控制指令"""
# 訂閱控制主題
self.mqtt_client.subscribe(self.config['topics']['control'])
# 在回調函數中處理指令
defon_message(client, topic, message):
iftopic == self.config['topics']['control']:
command = self._decrypt_data(message)
self._execute_remote_command(command)
returnon_message
二、實施與部署方案
1、部署實施步驟
第一階段:現場勘測與規劃(1-2周)
1.農田地形測繪與分區2.土壤性質檢測3.水源與電力評估4.傳感器布點規劃5.通信鏈路測試
第二階段:設備安裝與調試(2-3周)
1.ECM50-A07網關安裝:
├── 選擇中心位置
├── 防水箱安裝
├── 太陽能供電系統
└── 防雷接地處理
2.傳感器網絡部署:
├── 土壤傳感器安裝(深度:20-40cm)
├── 氣象站安裝(高度:2m)
├── 水位傳感器安裝
└── LoRa中繼部署(如需要)
3.執行機構安裝:
├── 電磁閥安裝
├── 水泵控制箱
└── 管路與布線
第三階段:系統配置與測試(1周)
1.網關參數配置:
├── LoRa網絡參數
├── 灌溉策略設置
├── 通信參數配置
└── 報警閾值設置
2.云平臺對接:
├── 設備注冊
├── 數據通道測試
├── 控制指令測試
└── 用戶權限配置
3.系統聯調:
├── 全功能測試
├── 壓力測試
├── 故障恢復測試
└── 用戶培訓
2、維護與運維計劃
日常維護:
每周:檢查設備狀態,清理傳感器
每月:校準傳感器,檢查供電系統
每季度:固件升級,系統優化
遠程監控:
classRemoteMaintenance:
defcheck_system_health(self):
"""系統健康度檢查"""
metrics = {
'gateway': {
'cpu_usage': self.get_cpu_usage(),
'memory_free': self.get_free_memory(),
'disk_usage': self.get_disk_usage(),
'uptime': self.get_uptime(),
},
'network': {
'lora_signal': self.get_lora_rssi(),
'nodes_online': self.get_online_nodes(),
'packet_loss': self.get_packet_loss(),
},
'power': {
'battery_level': self.get_battery_level(),
'solar_input': self.get_solar_power(),
'power_mode': self.get_power_mode(),
}
}
returnmetrics
基于ECM50-A07工業級可編程工控機的智慧農業精準灌溉系統,通過創新的"邊緣智能+LoRa通信"架構,為現代農業生產提供了一套高效、可靠、易用的完整解決方案。該系統不僅解決了傳統灌溉中的水資源浪費問題,更通過智能化管理顯著提升了農業生產效率和經濟效益。
本方案具備快速部署、易于擴展、維護簡便的特點,可廣泛應用于大田作物、設施農業、果園、茶園等多種農業場景,是推動農業現代化、實現可持續發展的理想選擇。
審核編輯 黃宇
-
工控機
+關注
關注
10文章
2079瀏覽量
53314 -
智慧農業
+關注
關注
4文章
886瀏覽量
21252
發布評論請先 登錄
瑞之辰壓力傳感器,高精度、寬場景解決智慧農業灌溉痛點

基于ECM50-A07工控機的智能農業精準灌溉方案
賦能農業灌溉,開啟智慧節水新范式-電容式液位傳感器
全場景通信工業級可編程工控機ECM50-A06方案介紹
蕪湖農田灌溉水質智能監測案例:凱米斯科技多參數傳感器助力精準農業

工控機:聯結智能生產的工業中樞,如何精準選擇?

智慧農業節水灌溉物聯網系統方案

工業控制的“智慧大腦”——工控機
PLC遠程控制網關在智慧農業中的精準灌溉系統應用

CC-Link IE與EtherCAT協議融合:驅動智慧農業灌溉系統升級

明遠智睿SSD2351開發板:儀器儀表與智慧農業的創新利器
嵌入式工控機VS普通工控機,哪個產品的性能更好?

4G工業路由器:智能農業灌溉系統的網絡基石

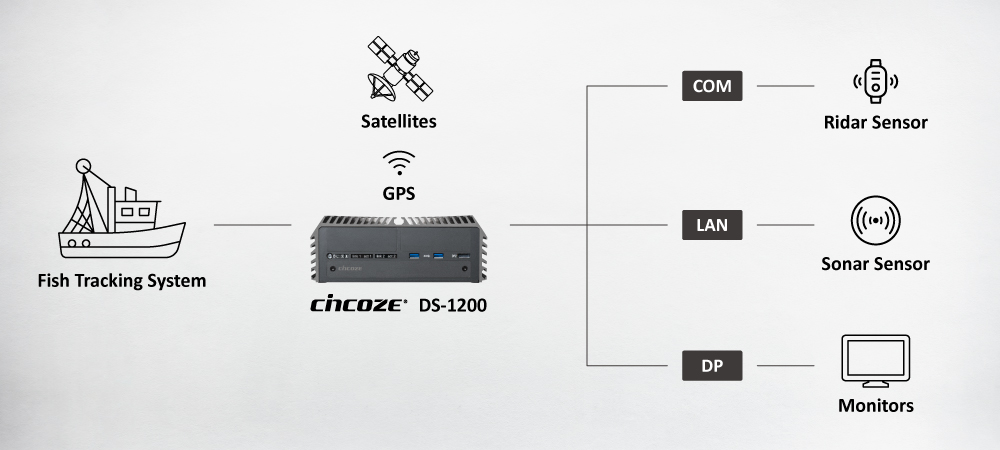
智慧漁業新趨勢: Cincoze 嵌入式工控機助力鮪魚捕撈精準升級



 工商網監
工商網監
評論