 基于ETAS嵌入式AI工具鏈將機器學習模型部署到量產ECU
基于ETAS嵌入式AI工具鏈將機器學習模型部署到量產ECU

前言:
AI在汽車行業的應用日益深化,如何將機器學習領域的先進模型(如虛擬傳感器)集成到ECU軟件中,已成為業界面臨的核心挑戰。
本文基于ETAS最新的Embedded AI工具,將介紹一種創新路徑,旨在賦能工程師高效的開發、優化并將ML模型成功部署在當前嵌入式控制器ECU。文章也將探討這一變革性方法如何重塑開發工程師的角色,并加速AI技術在汽車領域的普及進程。
一、實際案例
舉一項具體功能為例進行闡述:基于數據驅動的ML模型預測傳統燃油發動機的進氣質量 (Air Mass) ,并最終運行于ECU控制器。借此案例,我們會更完整展示ETAS嵌入式AI工具鏈的通用工作流程。
通常,能夠復現真實物理傳感器功能特性的軟件模型,被稱為虛擬傳感器。在示例中,建模數據來源于發動機試驗臺架,其細節在此不作贅述。我們的關注點將集中于從測量數據出發,經由自動化ML模型構建,最終生成面向發動機控制器的高度優化C代碼這一完整工作流。
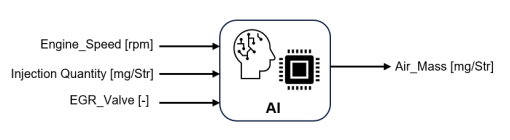
圖1:進氣質量估算模型
二、ML模型開發
對許多在日常工作中不常接觸此類任務的工程師而言,運用現代機器學習算法創建數據驅動模型是一項不小的挑戰。因此,一款工具能夠妥善處理測量數據適配、算法選擇,并將復雜繁多的模型參數等抽象簡化,就顯得尤為重要。理想工具應聚焦于工程師能夠輕松面對核心問題。

圖2:ML模型類型
工程師需要明晰哪些系統參數可能對目標建模變量產生重要影響,哪些數據適用于解決當前問題。尤其在處理瞬態測量數據與模型時,龐大的數據量及其采樣率更是關鍵考量因素。
ETAS的ASCMO工具為上述各個環節均提供了有力支持,助力工程師輕松構建初始模型。
標準工作流程如下:
選擇測量文件:確定初始測量文件,并指定影響系統行為的相關參數,以及待建模的目標輸出。
調整采樣時間:優化采樣率,在充分捕捉所有相關效應的同時,避免數據量過大影響建模速度。
模型構建與訓練:通過特有的Automated Machine Learning功能自動化機器學習,探索所選系統輸入與輸出之間的依賴關系。
2.1 選擇測量文件
選定目標測量文件后,ASCMO將顯示其中包含的所有信號列表。工程師從中選取所需信號,并將其定義為“輸入”或“輸出”。此外,也可在此階段指定合適的采樣時間。
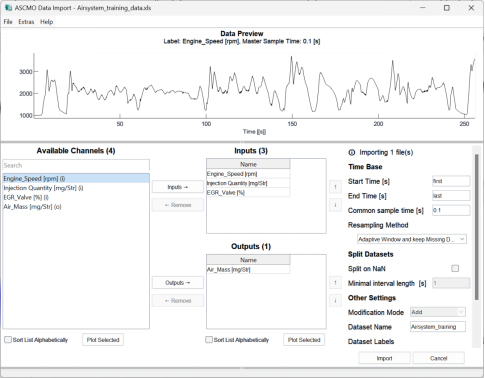
圖3:已加載測量文件的信號選擇界面(附采樣時間等選項)
預覽功能可直觀顯示所選信號的數據是否處于預期范圍并呈現合理變化趨勢。信號選擇支持過濾與保存,極大簡化了測量文件的管理,為之后其他項目的復用性提供了便利。
2.2 調整采樣時間
為應對各種潛在情況,測量數據常以高分辨率采集,這也導致了數據量龐大,可能在后續建模中成為障礙,增加計算時間與PC內存消耗。同時,過高的分辨率還可能引入與真實物理關系無關的噪聲。因此,審慎考量適當的采樣時間及必要的濾波手段,對確保模型精度至關重要。
為此,ASCMO提供了調整采樣時間以及使用濾波器去除數據噪聲的選項。
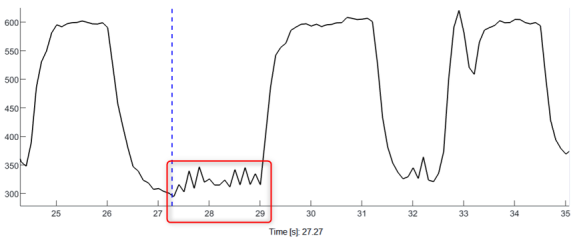
圖4:可能存在噪聲或采樣率過高的測量值
2.3 模型構建與訓練
在ASCMO中構建模型主要有兩種策略
其一為手動流程,雖能提供最大靈活性,但要求工程師深入了解各種AI機器學習算法、其應用場景及相關參數;
另一種則是自動化機器學習策略,旨在將尋找最佳模型類型并自動化配置繁瑣任務。由于搜索空間可能異常龐大,通常需要在嘗試多種模型以挑選最優解所耗費的時間,與缺乏先驗知識之間進行權衡。
對于數據驅動建模及機器學習算法經驗尚淺的工程師而言,尋找合適的模型及最優配置仍非易事。ASCMO內置了一套核心思路,其設計原則是:在提供充分的模型探索的同時,避免因選項過多而使工程師無所適從。
為獲得更精確的模型,經驗豐富的工程師也可以手動測試不同模型類型,并利用大量可調參數評估其質量。而對于不熟悉此類模型或希望提升效率的工程師,ASCMO的“AutoML”功能運用優化啟發式算法,為特定建模問題自動尋找最優模型類型及其配置,此過程的耗時取決于問題的復雜度、測量數據量以及系統輸入的數量。
自動化機器學習模型探索的結果,以模型誤差與模型復雜度構成的帕累托前沿圖(Pareto Front)呈現。右側顯示當前選定模型的詳細信息。圖5所示當前選定模型為一個采用“GRU”類型、包含3層的循環神經網絡,其RMSE值約為22。
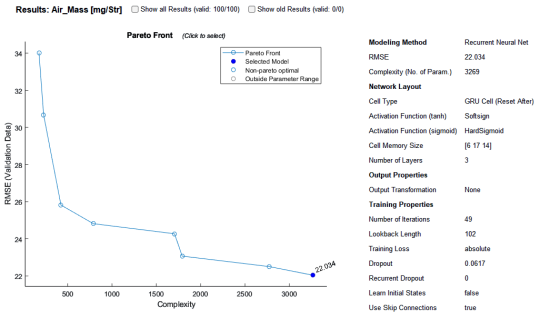
圖5:不同模型的帕累托前沿圖(模型誤差 vs. 模型復雜度)。誤差越低,模型通常越復雜。
為驗證模型質量,必須使用獨立的測試或驗證數據集,對模型推理結果與實際測量值進行對比。ASCMO支持導入任意附加數據集以測試模型,并包含協助選取合適測試數據的功能。只有當模型能夠良好泛化,可靠的預測未知行為時,才真正具備應用價值。
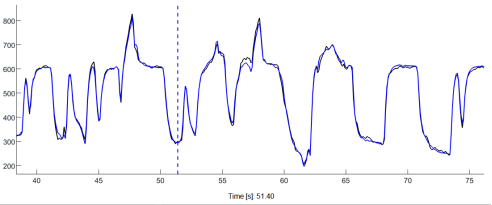
圖6: 模型預測(藍色)與測量真值(黑色)的對比,——GRU模型,輸出Air-Mass隨時間變化
在帕累托前沿中,追求更低的模型誤差往往意味著要接受更高的模型復雜度(參數量)。當計劃將此模型部署到嵌入式設備(如發動機控制器ECU)時,這是一個必須權衡的折衷方案。對于此類應用,ETAS安全高效的專用代碼生成工具Embedded AI Coder巧妙的加入到當前工作流程中。
一旦工程師選定合適模型,ASCMO便可將其導出為多種格式(例如也可用于仿真環境),這里提供一種專用格式,供Embedded AI Coder直接讀取和使用。同時,為最大化操作便利性,這一操作也可直接從ASCMO菜單界面啟動,自動生成高度優化的嵌入式C代碼。
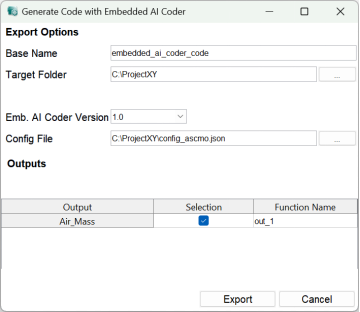
圖7: ASCMO的GUI菜單頁面中直接調用Embedded AI Coder
三、性能表現
微控制器MCU資源有限,且面臨嚴格的實時性約束。與其他商用C編譯器類似,Embedded AI Coder運用多種技術優化運行時性能和內存占用。
針對特定函數使用專用API。例如,一個優化后的Saturation函數可比通用實現方式節省6個CPU周期。
許多矩陣點積運算需要用到前序操作的部分數據切片。工具會復用已加載至內存中的數據,而非完全重新加載,從而顯著節約硬件資源。
智能內存劃分通過分析所有神經網絡層,嘗試分配盡可能少的RAM,其策略是復用可用內存區域而非總是申請新內存。
此外,借助硬件資源預估功能,工程師可早期評估所選模型是否適合目標MCU。
如圖8所示,從ASCMO的帕累托前沿導出了兩個備選模型。
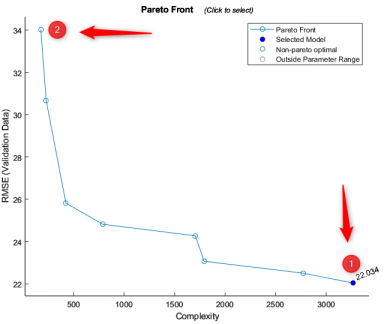
圖8:用于嵌入式部署的兩種模型變體
圖9與圖10證實了預期:相對簡單的模型比精度高的模型占用資源要少得多。
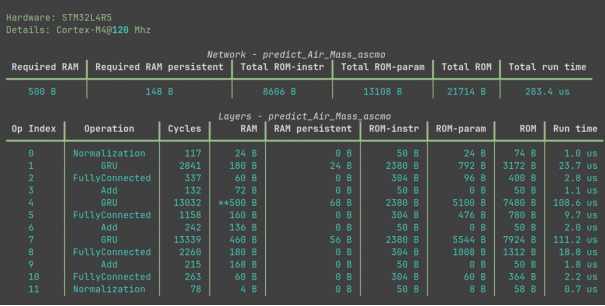
圖9:模型(2),RMSE較高,復雜度較低
圖10:模型(1),RMSE較低,復雜度較高
對硬件運行資源使用情況的細致分析,有助于在模型構建階段即進行優化。通過提供這些全面的能力,ETAS嵌入式AI工具鏈有效支持工程師進行權衡決策,為特定項目需求選取最佳模型。
從ASCMO v5.16開始,AI Coder的硬件資源預估正式內置在ASCMO的AutoML功能中,有助于在探索最優模型和參數時,預先考量目標硬件的特定內存與性能約束(RAM、ROM、Runtime)。這種預篩選機制確保ASCMO只推薦在給定約束條件下能提供最佳質量的模型類型。

圖11:硬件資源限值在AutoML界面中作為可選項
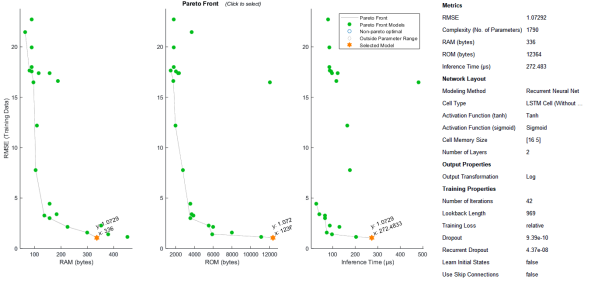
圖12:此時Pareto Front顯示所有基于硬件資源考量后的可選模型
最終,工程師再根據實際需要和傾向性做出恰當選擇。通常,明智的做法是在滿足精度要求的前提下,選擇盡可能簡潔的模型。
四、部署到目標硬件
如同ASCMO通過友好的用戶工作流抽象了機器學習的復雜性,Embedded AI Coder同樣致力于簡化將機器學習模型轉化為資源高效、安全可靠的代碼的過程,以下章節將詳述此方面特性。
4.1 代碼集成
首先,生成的代碼需易于集成至任何現有的ECU軟件開發工具鏈中。如圖所示,所有集成指導均在README文檔中詳細說明。
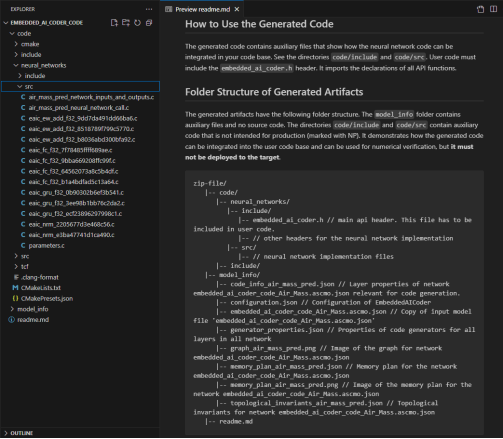
圖13:生成的代碼文件夾概覽。
/code/CMakeLists.txt 和 /code/CMakePresets.json 等附加文件,使得用戶能夠輕松地為任何設備及工具鏈集成并編譯代碼。若工程師部署了基于CI/CD流水線的服務器自動化流程,亦可通過命令行調用該工具。
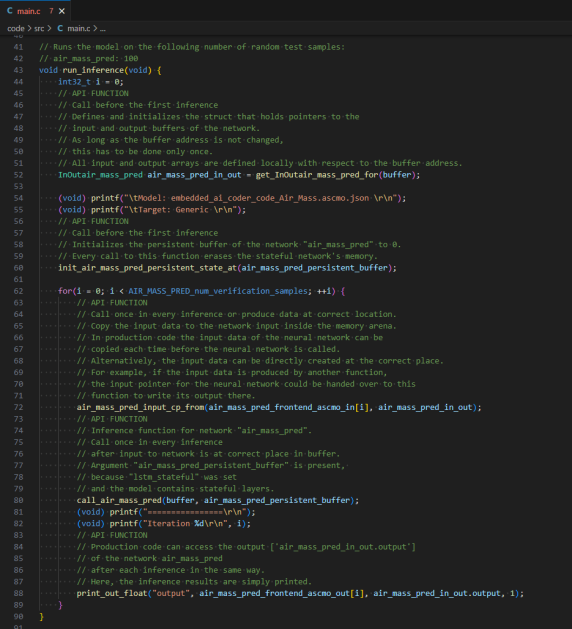
圖14:帶有詳細注釋的示例集成文件。
此外,針對使用MATLAB/Simulink等基于模型進行軟件開發的用戶,AI Coder在生成代碼的同時,可直接封裝成Simulink模塊庫,直接拖入至模型開發和仿真環境。

圖15:多種代碼集成方式
4.2 安全與合規
生成代碼已滿足ISO26262等汽車功能安全標準的所有要求,在保證與原始ML模型行為一致的同時,確保了內存安全并符合MISRA規范。
Embedded AI Coder會對生成的代碼執行自動化測試與驗證,這極大降低了軟件最終發布所需的工作量。
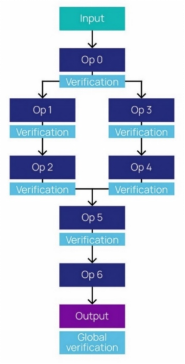
圖16:逐層驗證流程
功能安全是汽車系統的重中之重,必須確保生成的C代碼能夠毫無例外的正確執行ML模型。為此,Embedded AI Coder采用了自動驗證例程,對神經網絡的各個獨立層以及ML模型的整體輸出進行雙重核查。在代碼生成過程中,ML模型的每一步運算首先會經過獨立的驗證例程。編碼器通過數值驗證,確保生成的C代碼在每個獨立操作上產生的中間結果,均與原始模型對應神經網絡層的結果一致。與此同時,驗證過程確保只訪問合法的內存區域。
通過全局驗證,對生成的ML模型輸出進行數值等價性及內存訪問合法性的最終檢查。數值等價性意味著,使用驗證數據時,由ETAS ASCMO模型計算出的結果與生成代碼計算出的結果完全相同,生成代碼在代碼生成過程中未引入任何副作用,其行為與原始模型精確一致。工程師將獲得一份驗證報告,證明該ML模型的執行符合功能安全要求,滿足量產項目所需的等級標準。
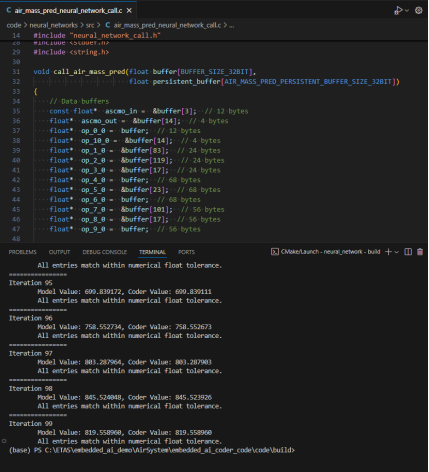
圖17:自動化驗證結果
五、嵌入式AI工具鏈總結與展望
以上展示了如何以簡潔快速的方式生成高精度模型,并進一步將其轉化為面向嵌入式系統(如控制器ECU)安全高效的C代碼。
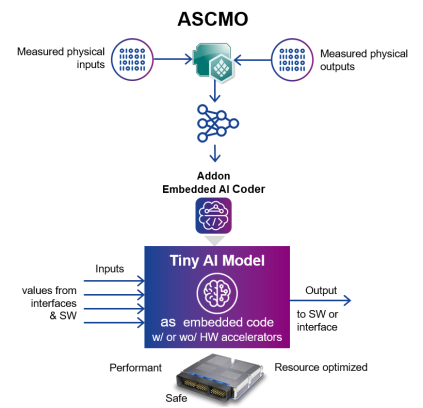
圖18:ETAS 嵌入式AI工具鏈
ETAS嵌入式AI方案成功彌補了傳統汽車領域軟件開發及標定工程師與機器學習新領域之間的鴻溝,可推進AI在汽車電子中的創新應用。
嵌入式ECU中AI模型的三大應用場景
1. 虛擬傳感器 : 利用現有信號預測目標物理量
用訓練好的ASCMO模型替代物理傳感器,節省硬件成本
在物理傳感器失效時,作為備份軟件傳感器,保障系統安全
對物理傳感器無法安裝或測量的信號進行估算
2. 大幅縮短軟件標定工作量
直接用訓練好的ASCMO模型替代復雜的基于物理原理的ECU模型
獲得更優的估計質量,同時顯著減少標定工作。避免了在極其復雜的模型中維護DCM文件、更新大量查找表及邏輯所帶來的人工和耗時
應用示例:扭矩模型、進氣量模型、氮氧化物(NOx)排放模型等
3. 預測性維護
利用系統在健康狀態下的穩健信號數據,訓練ASCMO異常檢測自編碼器模型
檢測系統異常行為,從而預防損壞,并能夠提前通知用戶或運維人員
應用示例:運動部件的健康狀態監測
-
控制器
+關注
關注
114文章
17787瀏覽量
193068 -
嵌入式
+關注
關注
5198文章
20442瀏覽量
333961 -
AI
+關注
關注
91文章
39754瀏覽量
301345 -
ecu
+關注
關注
14文章
982瀏覽量
57266
原文標題:ETAS 嵌入式AI 工具鏈
文章出處:【微信號:ETASChina,微信公眾號:ETAS易特馳】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

使用CUBEAI部署tflite模型到STM32F0中,模型創建失敗怎么解決?
如何在移動和嵌入式設備上部署機器學習模型
嵌入式AI的相關資料下載
介紹在STM32cubeIDE上部署AI模型的系列教程
如何使用TensorFlow將神經網絡模型部署到移動或嵌入式設備上

嵌入式機器學習的應用特性與軟件開發環境
【深圳】嵌入式AI實戰:半天上手,人形檢測模型部署+優化全流程




 工商網監
工商網監
評論