 基于Qorvo DW3000芯片的室內定位系統構建方法
基于Qorvo DW3000芯片的室內定位系統構建方法

以下文章來源于G-NiceRF,作者思為無線科技
Qorvo DW3000方案
室內場景對定位精度的要求日漸嚴苛,厘米級定位更是成為智慧管控、資產追蹤等應用的關鍵支撐,而超寬帶(UWB)技術憑借出色的抗干擾能力與測距精度,成為實現這一目標的優選路徑。基于Qorvo DW3000芯片的TWR雙向測距方案,在部署效率與定位性能之間找到了平衡,從硬件選型、現場部署到校準優化,整套工程實踐思路清晰可行,既能滿足深度定制需求,也能兼顧快速落地的場景,輕松破解天線偏差、環境遮擋等常見難題。
01明確需求與選擇測距方法
若要實現室內厘米級定位,首先要明確系統需求,如目標精度、更新頻率、延遲、電池續航、空間大小和形狀等,據此選擇合適的測距方法,設定成功指標用于后續驗證。在UWB 定位方面,TWR(雙向測距)是異步的,部署相對簡便。綜合部署復雜度與系統規模等因素,本文采用基于TWR的UWB測距方案,并從工程實踐角度,系統性介紹基于Qorvo DW3000芯片的室內定位系統構建方法。
02二、準備物料與工具鏈
1.物料清單
錨節點與標簽節點:選用DW3000開發模塊,它基于Qorvo的DW3000芯片,該芯片報告符合IEEE 802.15.4z HRP標準,并支持認證體系所需的物理層與測距特性。對于錨節點,可搭配Qorvo DWM3000EVB開發板與STM32 Nucleo開發板組合使用,再加上機載天線或外部天線;標簽節點同樣可采用DW3000開發模塊,配備緊湊型FPC以及可穿戴或手持式外殼,使用便攜式充電電源。
2.工具鏈和庫
編譯器和 SDK:對于DW3000開發模塊,使用Qorvo提供的驅動程序和示例代碼路徑,其針對DW3000系列和IEEE802.15.4z HRP測距標準,芯片制造商在視距(LOS)且完成天線延遲校準的典型測試條件下,報告其測距精度可達到約10厘米量級。
燒錄工具:使用 MCU 板的標準燒錄器對錨點和標簽目標進行編程。
串口控制臺:通過任何可讀取日志、配置和范圍輸出的 USB 串口應用程序進行操作。
繪圖和分析:利用 Python 腳本解析日志并繪制范圍直方圖和時間線,同時保留簡單的 README 文件以便重新運行繪圖。
版本管理:鎖定工具鏈版本,記錄確切的 SDK 標簽和編譯器版本,在每個里程碑后標記固件倉庫,方便他人重新編譯。
03模塊方案選擇建議
在系統選型上,基于Qorvo DW3000芯片的開發板更適合研發與深度定制場景,具備更高的調試自由度。開發者可結合Qorvo官方提供的驅動與示例代碼,對DW3000系列進行底層功能開發與算法優化,適用于對協議、測距流程或系統架構有特殊需求的項目。
而對于需要快速部署與落地的應用場景(如中小型室內定位系統、原型驗證等),更推薦使用UWB650Pro模塊。該模塊基于Qorvo DW3000芯片,高度集成射頻與控制電路,內置TWR測距流程及定位相關功能接口,并支持RSSI(接收信號強度指示)作為輔助信息。用戶無需參與芯片底層驅動開發,僅需通過UART接口配置參數(如傳輸速率、定位參數等),即可快速完成系統搭建。TWR提供高精度測距基礎,RSSI可作為輔助信息(用于錨點篩選或測距結果加權),兩者結合有助于在復雜環境下提升定位結果的穩定性與魯棒性。

針對UWB應用中常見的天線延遲校準問題,思為無線已在 UWB650 PC配置軟件中預置多款常用 UWB 天線的延遲參數。用戶只需選擇對應的天線型號并配置相關信道參數,系統即可自動完成校準,無需手動測量與調試,即可實現穩定可靠的高精度測距。

UWB650推薦方案物料清單


04組裝硬件、規劃電源與選擇外殼
硬件組裝要點
線路和接口:保持UWB模塊和控制器安裝在剛性載體上,確保無線電部分下方接地層清潔;使用屏蔽式USB或UART跳線,并在接觸運動的連接器上增加應力消除裝置。避免金屬靠近天線邊緣,以防改變天線特性,影響信號質量和定位精度。
電源預算和電池選擇:根據無線電常用狀態規劃功率。標簽在塔臺模式下收發消耗更多空中時間,到達時間模式下僅發送短暫閃爍信號,能耗較低。接收比發送消耗更多功率,要縮短接收窗口和空中時間,使用滿足通信距離要求的高數據速率,縮短前導碼和有效載荷長度。通過縮短消息傳輸時間、合理設置更新頻率、縮短接收窗口和預留瞬態干擾余量等方式降低能耗。同時,記錄固件中的模式轉換,根據不同模式下的平均電流和占空比計算預期電池壽命,更改相關參數后重新運行測量表格。

外殼選擇與安裝
外殼要求:外殼不應成為射頻濾波器,保持天線暢通無阻,確保外殼在關鍵方向上保持一致。最好使用非導電、對射頻友好的外殼直接安裝在天線表面,盡量保持視線暢通,錨點通常安裝在房間較高處靠近天花板,根據頻道情況使用獨立的天線并保持饋電匹配。
錨固安裝:將錨固件牢固固定在剛性結構上,避免振動,保持對覆蓋區域的清晰視線,避免將天線放置在靠近大型金屬表面的地方,除非已測量并補償其影響。給每個已安裝的節點貼上標簽,便于校準時追蹤電源和配置情況。部署前查閱當地 UWB 法規限制,確保射頻設置和外殼符合規則。在電源穩定、線路無應力和安裝到位后,進行錨固和標簽的刷寫固件及配置標準化工作。
05規劃錨點放置與校準調試網絡
錨點放置規劃
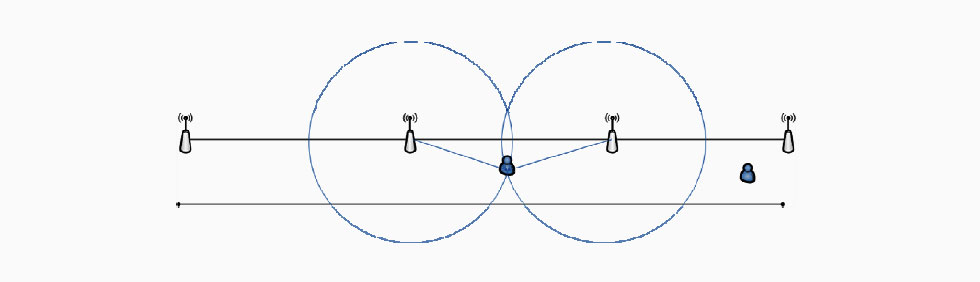
幾何規則:在覆蓋區域內分散放置錨點,使標簽能接收到不同方位角,避免錨點共線或緊密排列,以防測距數據來自相似方向時幾何精度衰減加劇,將較小測距誤差放大為較大位置誤差。對于三維定位,保持錨點不共面,利用周界采用廣角布局,將至少一個錨點抬離公共平面。
高度、位置和視線:將錨點安裝在墻壁或天花板高處,減少遮擋,提高視距傳輸概率,遠離金屬,確保天線附近有足夠空間,若要獲得穩定3D性能,可使用不同高度。遵循供應商提供的天線方向指南,確保附近物體朝向可預測。
小型和復雜房間布局:小房間使用四個非共面錨點進行周長或拐角處布局,避免直線;中等空間先設置周邊錨點,再增加盲區錨點;復雜幾何空間在遮擋區域使用基線加額外參數,放置錨點開辟新通道。
現場勘測:走遍現場畫出覆蓋區域草圖,標記大型反射器和阻擋物,站在候選錨點確認通往跟蹤區域的線路暢通,在候選地點和標簽間進行快速測試范圍或RSSI/SNR檢查,選擇牢固安裝點并確認電源和回程鏈路接入,記錄電纜走向并標記每個計劃的錨固位置,選擇至少一個高度不同的錨點以減少共面性,記錄每個計劃錨點的臨時坐標。

校準和調試網絡
天線延遲和硬件偏移校準:通過設置初始天線延遲,收集固定錨點下標簽在不同測量距離處的真實數據對,擬合線性模型,將每個設備的發射和接收天線延遲或斜率和偏移量存儲在非易失性配置中。
基準測試運行:鋪設直線膠帶或畫小網格,將標簽停在標記處記錄停留時間,沿緩慢動態路徑行走驗證連續性和漂移行為,保存原始到達高度、計算出的距離和位置以及精確的配置文件。
檢查清單:驗證固件版本和提交哈希值,確認錨固點坐標和高度,確保無線電配置匹配,已應用校準,觀察TWR模式運行狀態,確保日志記錄就緒。
FAQDW3000 UWB 室內定位常見問題
Q1:DW3000能否真正實現厘米級室內定位?
A:可以。在視距條件良好、錨點布局合理并完成天線延遲校準的情況下,基于 DW3000 的 TWR 測距方案可穩定達到厘米級精度。實際精度主要受錨點幾何分布和環境反射影響。
Q2:錨點數量和擺放對精度影響大嗎?
A:影響非常大。錨點應盡量分散、避免共線或共面,優先安裝在高處并保持良好視距。合理的幾何布局往往比單純增加錨點數量更重要。
Q3:天線延遲一定要校準嗎?
A:必須。未校準的天線延遲會直接引入系統性測距誤差,是影響定位精度的關鍵因素。使用已預置天線參數的模塊方案可顯著降低調試門檻。
Q4:開發板方案和 UWB650Pro 模塊該怎么選?
A:需要底層算法開發或協議定制,建議使用 DW3000 開發板;注重快速部署和工程落地,UWB650Pro 模塊更合適,可通過 UART 快速完成系統搭建。
Q5:復雜室內環境下定位不穩定怎么辦?
A:可通過增加錨點高度差、優化錨點幾何結構、結合 RSSI 輔助判斷非視距(NLOS)情況,并重新進行現場校準來提升整體穩定性。
-
定位系統
+關注
關注
10文章
658瀏覽量
37622 -
UWB
+關注
關注
33文章
1278瀏覽量
65207 -
開發板
+關注
關注
26文章
6306瀏覽量
118466 -
Qorvo
+關注
關注
17文章
732瀏覽量
80598
原文標題:UWB室內定位系統快速落地與部署指南
文章出處:【微信號:Qorvo_Inc,微信公眾號:Qorvo半導體】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
室內定位系統的發展前景
室內定位技術總述
室內定位技術的應用
uwb室內定位系統
常見的室內定位方案
室內定位技術應用
稀疏表示的CSI室內定位方法
Qorvo其DW3000系列產品支持與Apple U1芯片的互操作
DW1000芯片 室內定位傳感器

DW3000方案如何構建UWB高精度室內定位系統




 工商網監
工商網監
評論