") 采用AT89S52和VC++的實現(xiàn)步進電機實時顯示控制系統(tǒng)設計
采用AT89S52和VC++的實現(xiàn)步進電機實時顯示控制系統(tǒng)設計

1 引言
步進電機是將電脈沖信號轉變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下, 電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,即給 電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周 期性的誤差而無累積誤差,使得在速度、位置等控制領域,用步進電機來控制變的非常的簡 單。本文設計了一種基于AT89S52 單片機和VC++的步進電機控制系統(tǒng),可以實現(xiàn)對步進 電機的基本控制及狀態(tài)實時顯示。
2 系統(tǒng)組成
使用、控制步進電機必須由環(huán)形脈沖源、功率放大電路等部分組成控制系統(tǒng),脈沖信號 一般由單片機或CPU產(chǎn)生,一般脈沖信號的占空比為0.3-0.4左右,電機轉速越高,占空比則 越大。功率放大是驅動系統(tǒng)最為重要的部分。步進電機在一定轉速下的轉矩取決于它的動態(tài) 平均電流而非靜態(tài)電流,平均電流越大,電機力矩越大,要達到平均電流大,這就需要驅動 系統(tǒng)盡量克服電機的反電勢。因而不同的場合采取不同的驅動方式。到目前為止,驅動方式 一般有以下幾種:恒壓、恒壓串電阻、高低壓驅動、恒流等。
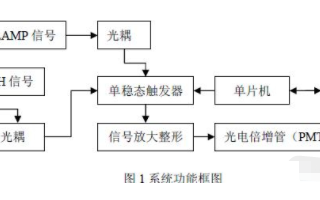
本文設計系統(tǒng)中,脈沖信號由單片機AT89S52產(chǎn)生并分配給步進電機各相,功率放大部分由驅動電路完成,系統(tǒng)結構框圖如圖1所示。
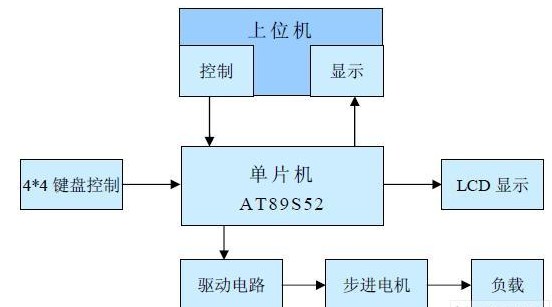
本文所設計系統(tǒng)中,步進電機模塊采用35BY48S03永磁式步進電機,用戶利用4*4鍵盤或上位機的控制界面實現(xiàn)指令輸入,采用上位機或1602字符型液晶模塊實時顯示運行狀態(tài)。
3 硬件設計
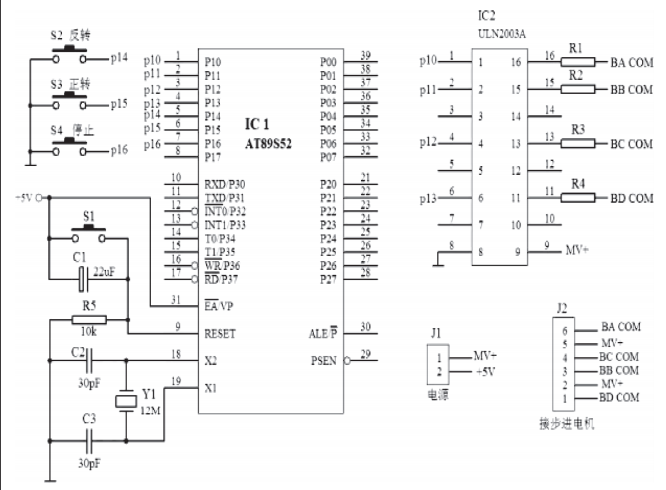
3.1 單片機最小系統(tǒng)電路
單片機的最小系統(tǒng)電路包括時鐘電路和復位電路。本文所設計系統(tǒng)中,時鐘電路采用內 部振蕩方式,所得的時鐘信號比較穩(wěn)定,實用電路中使用較多[3]。復位電路作用是使單片機 的片內電路初始化,使單片機從一種確定的狀態(tài)開始運行。復位電路采用2種基本形式:上 電復位、開關復位。
3.2 鍵盤電路
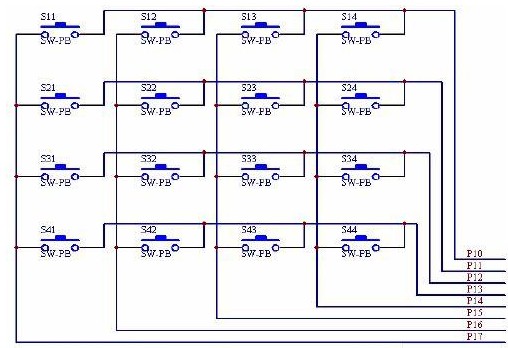
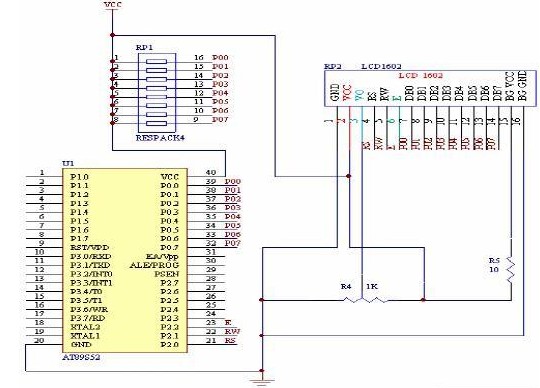
設計P1口接4*4鍵盤,鍵盤電路圖如圖2所示:
3.3 電機驅動電路
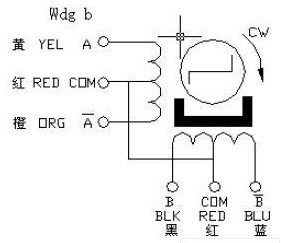
35BY48S03型步進電機接線圖如圖3所示,從圖中可以看出,電機共有四組線圈,四組線圈的一個端點連在一起引出,這樣一共有5根引出線。要使步進電機轉動,只要以一定的 次序輪流給各引出端通電即可,加電的方式可以有多種,包括單相驅動、雙相驅動、單-雙 相驅動等,相應步進角有整步和半步區(qū)分。在本文設計的系統(tǒng)中,采用單相驅動和單-雙相 驅動兩種加電方式驅動步進電機運轉。
根據(jù)該電機參數(shù),不難設計出驅動電路,因其工作電壓為12V,最大電流為0.26A,因 此用一塊開路輸出達林頓驅動器(ULN2003)作為驅動,通過P2.7-P2.4來控制各線圈的接通與 切斷。如果要改變電機的轉動速度只要改變兩次接通之間的時間,而要改變電機的轉動方向, 只要改變各線圈接通的順序[4]。
3.4 串行通信電路
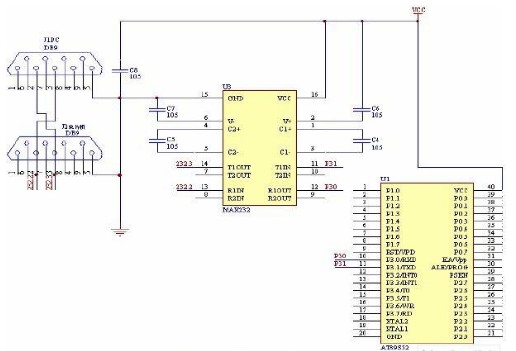
在PC機內接有PC16550(和8250兼容)串行接口、EIA-TTL的電平轉換器和RS-232C連 接器,除鼠標占用一個串行口外,還留有兩個串行口給用戶,這就是COM1(地址3F8H-3FFH) 和COM2(地址2F8H-2FFH),通過這兩個口,可以連接串行通信設備,如單片機、仿真機 等。由于單片機的串行發(fā)送和接收線TXD和RXD是TTL電平,而PC的COM1或COM2的 RS-232C連接器(D型9針插座)是EIA電平,因此單片機需加接MAX232芯片,通過串行電 纜線和PC相連接。本文所設計的串行通信電路如圖4所示。
3.5 下位機顯示電路
液晶采用顯示容量為2行16個字的1602液晶,1602采用標準的16腳接口,內部的字符發(fā) 生存儲器(CGROM)已經(jīng)存儲了160個不同的點陣字符圖形,每一個字符都有一個固定的 代碼[5]。設計電路圖如圖5所示。
4 軟件設計
軟件設計可分為兩個部分:上位機軟件設計和下位機軟件設計。上位機軟件設計包括: 上位機控制環(huán)境設計、上位機通信程序設計以及上位機程序的封裝發(fā)布;下位機軟件設計包 括:鍵盤掃描程序、下位機通信程序、主驅動程序、測試部分程序、顯示部分程序。
4.1 上位軟件設計
Visual C++設計了一套基礎類庫(Microsoft Foundation Class Library, MFC), MFC把編 程規(guī)范中的大多數(shù)內容封裝成為各種類,使程序員從繁雜的編程中解脫出來[6]。根據(jù)系統(tǒng)設 計需要,設計一個基于對話框的應用程序即可,如圖6所示。
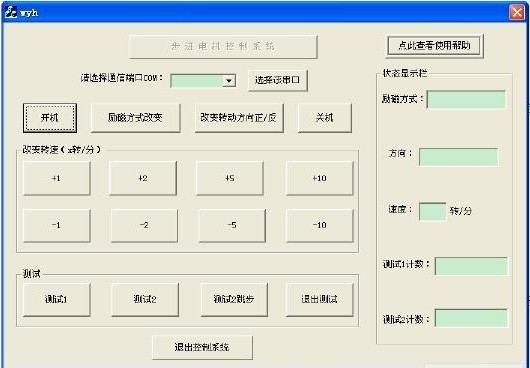
為實現(xiàn)上位機與下位機通信,利用Microsoft提供的串行通信ActiveX控件。該控件的相 應文件是MSCOMM32.OCX。在基于對話框的程序中使用控件,需要進行以下幾方面操作: 拖動控件圖標到窗口上,創(chuàng)建控件ID。在對話框頭文件中聲明CMSComm類的變量及引用控 件類頭文件。創(chuàng)建CMSComm類的實例。建立控件事件響應代碼框架[7]。
在電機狀態(tài)改變后,由下位機將代表各狀態(tài)的數(shù)據(jù)發(fā)送給上位機,上位機接收到后存入 一個數(shù)組內,根據(jù)此數(shù)組內容刷新各編輯框內容,以達到實時顯示的目的。此處共有五個數(shù) 據(jù),放入rxdata數(shù)組中,分別代表勵磁狀態(tài)、轉動方向、速度、測試1計數(shù)、測試2計數(shù)。上 位機MSComm控件SetRThreshold屬性設置為5,則當下位機將五個數(shù)據(jù)發(fā)送完后,上位機立 即觸發(fā)OnComm事件,進行接收[8]。
當我們安裝VC++6.0時,如果選擇了ACtiveX控件項(自定義安裝),MSComm控件就 會自動安裝在計算機上了,并在系統(tǒng)文件夾下多了3個文件:Mscomm.srg,Mscomm32.ocx, Mscomm32.dep,即MSComm控件已經(jīng)過授權,但要注意的是,如果程序移植到其它沒有安 裝VC軟件的PC機上,必須將其使用“執(zhí)照”License 在注冊表中登記注冊,才可以正常運行。 為了正常運行, 還需要將VC開發(fā)的可執(zhí)行文件與運行所需的三個動態(tài)鏈接文件 MFC42D.DLL,MFCO42D.DLL,MSVCRTD.DLL放在同一個文件夾中。使用Installshield軟 件進行封裝實現(xiàn)以上要求即可。
4.2 下位機軟件設計
本文所設計系統(tǒng)中,采用單相驅動和單-雙相驅動兩種加電方式驅動步進電機運轉,即 單相四拍和單-雙相八拍驅動,分別為整步和半步運轉,步進角分別為7.5度和3.75度,不同 的驅動方式其狀態(tài)表不同,兩種驅動方式的波形及狀態(tài)表如下,其中1代表高電平,表示驅 動的磁極繞組通電;0代表低電平,表示驅動的磁極繞組不通電。

按照設計要求改變轉速,則只要改變P2.7-P2.4輪流改變電平的時間即可達到要求,這個 時間不應采用延時來實現(xiàn),因為會影響到其他功能的實現(xiàn)。這里以定時的方式來實現(xiàn),晶振 頻率為11.0592M,采用T0方式1定時。主程序流程圖如圖7所示:
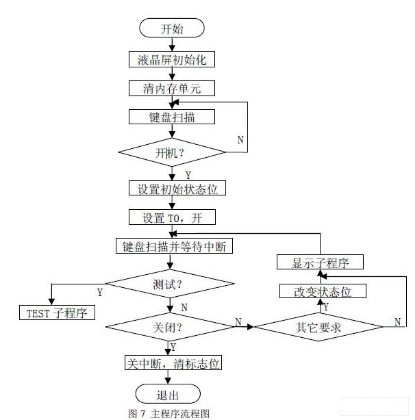
系統(tǒng)上電后,首先進行初始化,包括液晶屏初始化及將程序所用到的內存單元(開關機 狀態(tài)標志位7FH、正反轉標志位7EH、單相勵磁或單雙相勵磁標志位7DH、測試標志位7CH、 當前速度寄存單元2EH)清零。然后檢測是否開啟電機,檢測到開信號后,設置狀態(tài)位,7FH=1,7EH=1,7DH=1,2EH=10,代表起始狀態(tài)設置為:單雙相勵磁正轉,起始速度為10r/m。
設置 T0 相關參數(shù)后,開始定時,同時檢測鍵盤是否有其它請求發(fā)生,如果有,則改變 相應的狀態(tài)位,并改變單片機輸出波形,控制步進電機運行狀態(tài)改變。
串行通信的編程方式有兩種查詢方式:查TI 或RI 是否為“1”。中斷方式:如果預先開 了中斷,當TI、RI 為“1”,會自動產(chǎn)生中斷。兩種方式中當發(fā)送或接受數(shù)據(jù)后都要注意清 TI 或RI。本文所設計系統(tǒng)中,下位機采用查詢及中斷兩種接收方式,接收上位機的控制指 令;發(fā)送采用查詢方式,將當前電機運行狀態(tài)信息發(fā)給上位機實時顯示。
5 功能驗證
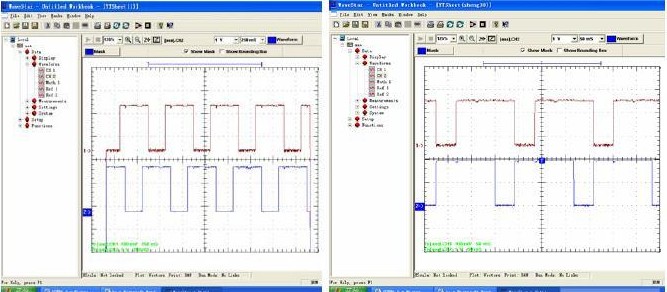
利用示波器測量P2.7-P2.4口產(chǎn)生的波形,以測試電機的激勵脈沖是否與理論相符,所測 波形如圖8、9所示。圖8是在單-雙相八拍勵磁方式,轉速為10轉/分的情況下,測量出的P2.7 和P2.5波形,即A,/A的激勵波形。圖9是在單相四拍勵磁方式,轉速為30轉/分的情況下, 測量出的P2.7和P2.6波形,即A,/B的激勵波形。
上位機控制操作和鍵盤控制操作可以單獨發(fā)出指令,也可以交互發(fā)出指令,該系統(tǒng)應用 環(huán)境較廣。經(jīng)測試,所設計系統(tǒng)可以很好的達到設計要求,可以實現(xiàn)對步進電機的基本控制 及狀態(tài)實時顯示。
6 結論
本文設計出的步進電機控制系統(tǒng),可以實現(xiàn)對步進電機的基本控制及運行狀態(tài)的實時顯 示。該系統(tǒng)實用性強,操作方便,經(jīng)測試取得了良好效果。經(jīng)過一定的技術改進后,可以應 用于包裝機械的物料計量、包裝膜供送、橫封等過程中,精確控制執(zhí)行機構的運行速度和運 行位置。利用步進電機替代傳統(tǒng)的機械或其它方式,不僅能使包裝機械結構變得簡單、調節(jié) 方便、可靠性增加,而且精度會得到很大提高。
-
單片機
+關注
關注
6076文章
45494瀏覽量
670275 -
控制系統(tǒng)
+關注
關注
41文章
6952瀏覽量
114087 -
步進電機
+關注
關注
153文章
3248瀏覽量
152348
發(fā)布評論請先 登錄
基于AT89S52單片機實現(xiàn)激光雷達門控控制系統(tǒng)的軟硬件設計
基于單片機AT89S52的直流電機PWM調速控制系統(tǒng)資料下載
如何利用AT89S52實現(xiàn)在線編程控制系統(tǒng)的設計
基于AT89S52的串口通信控制LCM顯示
基于AT89S52的SD卡讀寫系統(tǒng)
基于AT89S52的遠程報警和控制系統(tǒng)
基于AT89C52單片機的步進電機控制系統(tǒng)設計
基于AT89S52的空調溫度控制系統(tǒng)的設計
基于AT89S52的溫度顯示報警系統(tǒng)
基于AT89S52的網(wǎng)絡控制系統(tǒng)設計應用
基于AT89S52的無人機航空遙感控制系統(tǒng)設計

如何使用51單片機進行步進電機控制系統(tǒng)的設計與實現(xiàn)
基于AT89S52單片機的PID恒溫控制系統(tǒng)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論