") 采用Atmega 16L為核心實(shí)現(xiàn)底片自動(dòng)定位系統(tǒng)的設(shè)計(jì)
采用Atmega 16L為核心實(shí)現(xiàn)底片自動(dòng)定位系統(tǒng)的設(shè)計(jì)

引言
在底片判讀過(guò)程中,經(jīng)常會(huì)要求對(duì)底片張數(shù)的統(tǒng)計(jì)及對(duì)不同位置的底片進(jìn)行自動(dòng)定位,以方便查找和放大等工作。該底片自動(dòng)查找系統(tǒng)就是為了實(shí)現(xiàn)這些功能而設(shè)計(jì)的一種全自動(dòng)間隔檢索設(shè)備;本設(shè)計(jì)主要是為了解決底片查找時(shí),人工方式所產(chǎn)生效率低的問(wèn)題,而設(shè)計(jì)的一種實(shí)用系統(tǒng),從而能有效地提高生產(chǎn)效益。其實(shí)現(xiàn)功能如下:若按下自動(dòng)鍵,此時(shí)進(jìn)行剛上電的數(shù)照片動(dòng)作,會(huì)自動(dòng)數(shù)出一共有多少?gòu)埖灼辉谶@個(gè)過(guò)程中按下停止鍵時(shí)電機(jī)停止,再按一次自動(dòng)鍵,恢復(fù)正常數(shù)照片動(dòng)作;若按下存儲(chǔ)鍵會(huì)存儲(chǔ)當(dāng)前的張數(shù);當(dāng)?shù)灼狡矔r(shí)電機(jī)自動(dòng)停轉(zhuǎn),同時(shí)會(huì)顯示總的張數(shù)。此時(shí)按下模式鍵可進(jìn)入設(shè)置所要的照片張數(shù)和所需速度;共三級(jí)速度,可用增鍵與減鍵調(diào)整;通過(guò)增鍵與減鍵調(diào)到想看的張數(shù)后,按下確認(rèn)鍵,自動(dòng)調(diào)整到所設(shè)張數(shù)。在停止時(shí)按下存儲(chǔ)鍵會(huì)進(jìn)入所存儲(chǔ)張數(shù)狀態(tài),通過(guò)存儲(chǔ)增鍵與存儲(chǔ)減鍵調(diào)到已存儲(chǔ)的地址單元對(duì)應(yīng)的張數(shù);有30個(gè)存儲(chǔ)的地址單元可供存儲(chǔ)不同的張數(shù);按下存儲(chǔ)翻看鍵將會(huì)自動(dòng)調(diào)整到所存儲(chǔ)張數(shù)。系統(tǒng)能方便找到所想要的底片,從而對(duì)底片進(jìn)行放大等處理。
1 控制系統(tǒng)的組成及工作原理
本控制系統(tǒng)采用了Atmega 16L控制,Atmel公司生產(chǎn)的Atmega 16L是一款比較理想的芯片,它的內(nèi)部集成了較大容量的存儲(chǔ)器和豐富強(qiáng)大的硬件接口電路,具備了AVR高檔單片機(jī)的MEGE系列的全部性能和特點(diǎn):具有豐富的片內(nèi)資源,使系統(tǒng)簡(jiǎn)潔可靠;運(yùn)算速度快,能達(dá)到1MI PS的處理速度,有利于實(shí)現(xiàn)智能控制算法;AVR單片機(jī)中的mega系列具有超強(qiáng)的抗干擾能力,增強(qiáng)了產(chǎn)品的安全可靠性;具有高效、廉價(jià)的高級(jí)語(yǔ)言開(kāi)發(fā)環(huán)境,便于功能的擴(kuò)展與變更,極大地縮短了開(kāi)發(fā)周期。內(nèi)部有16 KB的FLASH存儲(chǔ)器,1 KB的SRAM,可方便地反復(fù)擦寫(xiě)、修改程序,由于外部不用擴(kuò)展程序存儲(chǔ)器,可以簡(jiǎn)化電路設(shè)計(jì),并且包含PWM信號(hào)輸出,非常適合本系統(tǒng)的開(kāi)發(fā)。由于利用了芯片的在系統(tǒng)編程(IS P)功能,因此不需要移動(dòng)芯片。在軟件設(shè)計(jì)時(shí)設(shè)計(jì)成:一旦代碼文件被重新編過(guò),即自動(dòng)下載到芯片,并自動(dòng)復(fù)位運(yùn)行,是真正的“所編即所得”。
整個(gè)系統(tǒng)包括:?jiǎn)纹瑱C(jī)供電電源模塊,數(shù)碼管顯示模塊,正反向控制模塊,按鍵模塊,控制信號(hào)轉(zhuǎn)化模塊,檢測(cè)板模塊。其工作原理如圖1所示。

圖1 系統(tǒng)電路圖主要組成部分
系統(tǒng)采用光電傳感器來(lái)對(duì)底片間隔的信號(hào)進(jìn)行采集,光電傳感器是以光電效應(yīng)為基礎(chǔ),將光信號(hào)轉(zhuǎn)換為電信號(hào)的傳感器。當(dāng)傳感器檢測(cè)到滿足條件的被測(cè)底片間隔的信號(hào)時(shí),立即停止產(chǎn)生PWM波,讓底片停在滿足條件的位置,接著可以對(duì)滿足條件的底片進(jìn)行處理,AVR單片機(jī)可以產(chǎn)生PWM波,經(jīng)過(guò)功率組件LMD18200實(shí)現(xiàn)對(duì)電機(jī)的全數(shù)字化驅(qū)動(dòng),能量利用率接近100 %。為了實(shí)現(xiàn)對(duì)直流電機(jī)精確的控制,必須實(shí)時(shí)采集底片的位置和電機(jī)的速度。對(duì)直流電機(jī)進(jìn)行的控制是通過(guò)單片機(jī)對(duì)光電器件輸出脈沖的計(jì)數(shù),準(zhǔn)確獲知位置信息而實(shí)現(xiàn)的。
2 系統(tǒng)各模塊的設(shè)計(jì)
2.1 電機(jī)驅(qū)動(dòng)電路
本系統(tǒng)中電機(jī)采用PWM方式調(diào)速,驅(qū)動(dòng)器采用專(zhuān)業(yè)H橋組件LMD18200。LMD18200是美國(guó)國(guó)家半導(dǎo)體公司(NS)生產(chǎn)的用于電機(jī)驅(qū)動(dòng)的功率集成芯片,內(nèi)部集成4個(gè)DMOS管構(gòu)成一個(gè)H橋,具備完善的邏輯控制電路和芯片保護(hù)電路;工作電壓高達(dá)55 V;峰值輸出電流高達(dá)6 A,連續(xù)輸出電流達(dá)3 A;輸入TTL/CMOS電平兼容。電機(jī)驅(qū)動(dòng)電路原理如圖1所示。
小型機(jī)電一體化產(chǎn)品要求直流電機(jī)的驅(qū)動(dòng)器既有較小的體積,又能提供較大的電流、電壓輸出。采用達(dá)林頓三級(jí)管搭制H橋?qū)崿F(xiàn)PWM脈寬調(diào)制控制,由于分立器件各個(gè)元件的特性并不相同,調(diào)速性能不太好,而且電路不能達(dá)到很高的穩(wěn)定性。相比而言,采用美國(guó)國(guó)家半導(dǎo)體公司推出的專(zhuān)用于運(yùn)動(dòng)控制的橋組件LMD18200T具有很大的優(yōu)勢(shì)。
LMD18200原理框圖如圖2所示。
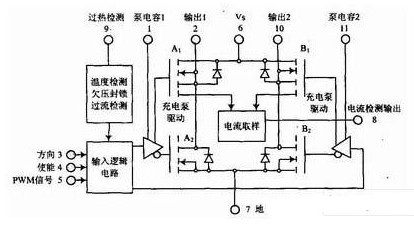
圖2 LMD18200原理框圖
圖2中,4個(gè)DMOS管構(gòu)成的H橋及其控制邏輯電路均包含在1個(gè)11腳的T-220封裝中,LMD18200工作原理:內(nèi)部集成了4個(gè)DMOS管,組成一個(gè)標(biāo)準(zhǔn)的H型驅(qū)動(dòng)橋。通過(guò)充電泵電路為上橋臂的2個(gè)開(kāi)關(guān)管提供柵極控制電壓,充電泵電路有一個(gè)300 kHz左右的工作頻率。可在引腳1,11外接電容形成第二個(gè)充電泵電路,外接電容越大,向開(kāi)關(guān)管柵極輸入的電容充電速度越快,電壓上升的時(shí)間越短,工作頻率可以更高。引腳2,10接直流電機(jī)電樞,正轉(zhuǎn)時(shí)電流的方向應(yīng)該從引腳2到引腳10;反轉(zhuǎn)時(shí)電流的方向應(yīng)該從引腳10到引腳2。電流檢測(cè)輸出引腳8可以接一個(gè)對(duì)地電阻,通過(guò)電阻來(lái)輸出過(guò)流情況。內(nèi)部保護(hù)電路設(shè)置的過(guò)電流閾值為10 A,當(dāng)超過(guò)該值時(shí)會(huì)自動(dòng)封鎖輸出,并周期性地自動(dòng)恢復(fù)輸出。如果過(guò)電流持續(xù)時(shí)間較長(zhǎng),過(guò)熱保護(hù)將關(guān)閉整個(gè)輸出。過(guò)熱信號(hào)還可通過(guò)引腳9輸出,當(dāng)結(jié)溫達(dá)到145℃時(shí)引腳9有輸出信號(hào)。
2.2 光電檢測(cè)電路
紅外線光電開(kāi)關(guān)(光電傳感器)是光電接近開(kāi)關(guān)的簡(jiǎn)稱(chēng),它是利用被檢測(cè)物體對(duì)紅外光束的遮光或反射,由同步回路選通而檢測(cè)物體的有無(wú),其物體不限于金屬,對(duì)所有能反射光線的物體均可檢測(cè)。產(chǎn)品廣泛用于電力儀表、電子儀器儀表、計(jì)數(shù)器、轉(zhuǎn)速測(cè)量、位置測(cè)量、傳真機(jī)、碎紙機(jī)等各種工業(yè)和民用場(chǎng)合。
本測(cè)試系統(tǒng)采用EVERCOLORS的ITR-8307反射式光電開(kāi)關(guān)。ITR-8307光電開(kāi)關(guān)是一種集發(fā)射器和接收器于一體的傳感器,當(dāng)有被檢測(cè)物體經(jīng)過(guò)時(shí),將光電開(kāi)關(guān)發(fā)射器發(fā)射的足夠量的光線反射到接收器,于是光電開(kāi)關(guān)就產(chǎn)生了開(kāi)關(guān)信號(hào)。當(dāng)被檢測(cè)物體的表面光亮或其反光率極高時(shí),反射式的光電開(kāi)關(guān)是首選的檢測(cè)開(kāi)關(guān)。
本設(shè)計(jì)中采用額定電壓為24 V的直流電壓作為光電開(kāi)關(guān)的工作電壓。由所選光電開(kāi)關(guān)的原理可知,光電開(kāi)關(guān)輸出脈沖信號(hào)的低電平為0 V,高電平為24 V,高電平采用2個(gè)電阻進(jìn)行分壓。再由兩個(gè)三極管輸入到單片機(jī)引腳,三極管設(shè)計(jì)電路如圖1所示,完成低電平0 V,高電平5 V的轉(zhuǎn)換。
2.3 人機(jī)接口電路
人機(jī)接口電路包括鍵盤(pán)和4位LED數(shù)碼管顯示,鍵盤(pán)模塊采用的是3×4行列矩陣式非編碼鍵盤(pán),鍵盤(pán)用來(lái)對(duì)參數(shù)進(jìn)行設(shè)定和功能的選擇,包括刪除、數(shù)據(jù)傳輸、查詢等功能;顯示器模塊主要是由4位LED數(shù)碼管和74LS595芯片組成;其電路圖如圖3所示,74LS595具有三態(tài)和鎖存功能,腳14 SER為串行輸入端,腳11SRCLK為移位寄存器時(shí)鐘輸入,腳12為鎖存寄存器時(shí)鐘輸入,它連接微處理器與4位數(shù)字的7段數(shù)字LED顯示,數(shù)碼管用來(lái)實(shí)時(shí)顯示被測(cè)底片張數(shù),速度,存儲(chǔ)的地址及張數(shù)等數(shù)據(jù)。
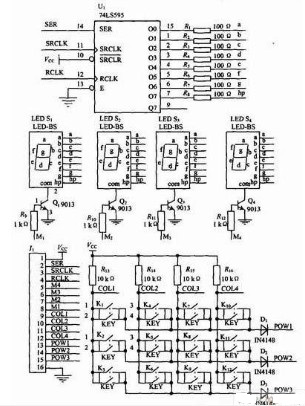
圖3 人機(jī)接口電路
3 控制系統(tǒng)軟件的總體設(shè)計(jì)
系統(tǒng)軟件總體流程圖如圖4所示,在軟件設(shè)計(jì)時(shí),主要實(shí)現(xiàn)張數(shù)計(jì)數(shù)、片尾傳感器信號(hào)處理停轉(zhuǎn)、設(shè)置、所需張數(shù)定位、存儲(chǔ)底片張數(shù)等功能。
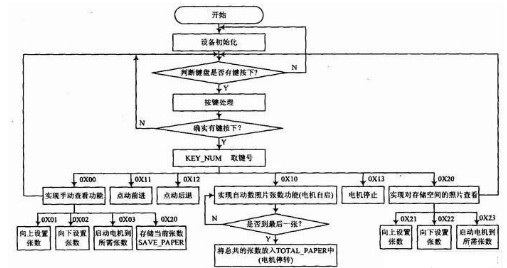
圖4 系統(tǒng)軟件總體流程圖
4 結(jié)語(yǔ)
采用Atmel公司的AVR系列單片機(jī)中的Atmega 16L為核心,結(jié)合紅外線光電開(kāi)關(guān),實(shí)現(xiàn)了底片張數(shù)的統(tǒng)計(jì)以及對(duì)不同位置的底片進(jìn)行自動(dòng)定位,系統(tǒng)能方便地找到所想要的底片,從而對(duì)底片進(jìn)行放大等處理。該底片自動(dòng)查找系統(tǒng)就是為了實(shí)現(xiàn)這些功能而設(shè)計(jì)的一種全自動(dòng)間隔檢索設(shè)備。本設(shè)計(jì)主要是為了解決底片查找時(shí),針對(duì)人工方式所產(chǎn)生效率低的問(wèn)題而設(shè)計(jì)的一種實(shí)用系統(tǒng),從而極大地提高了生產(chǎn)效益。
本文的創(chuàng)新點(diǎn)是利用紅外線反射式傳感器實(shí)現(xiàn)了底片自動(dòng)定位的功能;系統(tǒng)能實(shí)現(xiàn)底片張數(shù)的自動(dòng)統(tǒng)計(jì)、目標(biāo)底片保存和自動(dòng)查找的功能;具有性能穩(wěn)定、性價(jià)比高、電路簡(jiǎn)潔、自動(dòng)化程度高的特點(diǎn)。
-
單片機(jī)
+關(guān)注
關(guān)注
6076文章
45495瀏覽量
670463 -
AVR
+關(guān)注
關(guān)注
11文章
1138瀏覽量
81671 -
存儲(chǔ)器
+關(guān)注
關(guān)注
39文章
7739瀏覽量
171686
發(fā)布評(píng)論請(qǐng)先 登錄
電纜故障定位系統(tǒng)的核心內(nèi)容
車(chē)載PCB價(jià)值飆升!16層HDI板撐起L2+智駕成本核心
智慧工地人員定位從系統(tǒng)框架、核心功能到價(jià)值與趨勢(shì)詳解(二)

人員定位軟件系統(tǒng)從核心架構(gòu)、關(guān)鍵功能、主流技術(shù)、典型應(yīng)用與選型要點(diǎn)詳解

工廠人員定位軟件系統(tǒng)從場(chǎng)景分級(jí)與技術(shù)選型、系統(tǒng)架構(gòu)到核心功能詳解(一)

落錘沖擊試驗(yàn)機(jī)的自動(dòng)定位裝置設(shè)計(jì)與精度驗(yàn)證
北斗衛(wèi)星導(dǎo)航定位從核心框架到定位流程詳解(一)
電纜故障定位預(yù)警系統(tǒng)實(shí)現(xiàn)故障定位的核心原理
化工廠人員定位技術(shù)從系統(tǒng)架構(gòu)到核心功能詳解(一)

探秘核心技術(shù):全自動(dòng)電阻率測(cè)試儀的自動(dòng)化架構(gòu)與精密測(cè)量算法

具有 32KB 系統(tǒng)內(nèi)可編程 Flash 的 8 位 微控制器ATMEGA32中文規(guī)格書(shū)
基于CW32L010的高性能溫控器方案
自動(dòng)駕駛汽車(chē)是如何準(zhǔn)確定位的?

智慧園區(qū)訪客管理新范式:定位系統(tǒng)核心功能解析
云酷藍(lán)牙人員定位系統(tǒng):賦能企業(yè)智能化管理的核心優(yōu)勢(shì)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論