") 汽車級CAN FD收發(fā)器TCAN1044AEV-Q1:技術(shù)解析與應(yīng)用指南
汽車級CAN FD收發(fā)器TCAN1044AEV-Q1:技術(shù)解析與應(yīng)用指南

汽車級CAN FD收發(fā)器TCAN1044AEV-Q1:技術(shù)解析與應(yīng)用指南
在汽車電子領(lǐng)域,CAN(Controller Area Network)總線作為一種廣泛應(yīng)用的通信協(xié)議,對于實(shí)現(xiàn)車輛各系統(tǒng)之間的數(shù)據(jù)交互至關(guān)重要。而CAN收發(fā)器則是CAN總線通信的核心部件,它負(fù)責(zé)將控制器的數(shù)字信號轉(zhuǎn)換為適合在CAN總線上傳輸?shù)牟罘?a target="_blank">信號,以及將總線上的差分信號轉(zhuǎn)換回?cái)?shù)字信號供控制器處理。今天,我們就來詳細(xì)解析一款具有1.8V I/O支持功能的0級故障保護(hù)CAN FD收發(fā)器——TCAN1044AEV-Q1。
文件下載:tcan1044aev-q1.pdf
一、器件概述
TCAN1044AEV-Q1是德州儀器(Texas Instruments)推出的一款高速CAN收發(fā)器,完全符合面向汽車應(yīng)用的AEC-Q100(0級)標(biāo)準(zhǔn),滿足ISO 11898-2:2016高速CAN規(guī)范物理層要求。該器件具有出色的電磁兼容性(EMC),支持傳統(tǒng)CAN和經(jīng)優(yōu)化的CAN FD性能,數(shù)據(jù)速率低至9.2kbps,最高可達(dá)8Mbps,非常適合汽車和運(yùn)輸領(lǐng)域的各種應(yīng)用。
二、特性亮點(diǎn)
2.1 廣泛的標(biāo)準(zhǔn)兼容性
- 符合ISO 11898-2:2016物理層標(biāo)準(zhǔn)要求,同時支持ISO 11898-5:2007、SAE J2284等多種CAN和CAN FD標(biāo)準(zhǔn),為不同的汽車應(yīng)用場景提供了強(qiáng)大的兼容性。
- 滿足IEC 62228-3、VeLIO、SAE J2962-2等EMC要求,確保在復(fù)雜的電磁環(huán)境下穩(wěn)定工作。
2.2 豐富的保護(hù)特性
- 具備總線故障保護(hù)(±58V)、欠壓保護(hù)、熱關(guān)斷(TSD)、TXD顯性超時(DTO)等多種保護(hù)功能,有效提高了系統(tǒng)的可靠性和穩(wěn)定性。
- 在電源欠壓或浮動引腳情況下,定義了明確的失效防護(hù)行為,保障系統(tǒng)在異常情況下的安全運(yùn)行。
2.3 靈活的I/O電壓支持
通過$V_{IO}$引腳實(shí)現(xiàn)內(nèi)部邏輯電平轉(zhuǎn)換功能,允許將收發(fā)器I/O直接連接到1.8V、2.5V、3.3V或5V邏輯電平,無需額外的電平轉(zhuǎn)換電路,簡化了系統(tǒng)設(shè)計(jì)。
2.4 低功耗待機(jī)模式
支持低功耗待機(jī)模式,可通過符合ISO 11898-2:2016所定義喚醒模式(WUP)的CAN總線喚醒,在降低系統(tǒng)功耗的同時,確保系統(tǒng)能夠及時響應(yīng)外部事件。
2.5 優(yōu)化的封裝設(shè)計(jì)
提供8引腳SOIC和小型SOT-23封裝,滿足不同應(yīng)用場景對空間的要求。同時,優(yōu)化了未上電時的性能,總線和邏輯引腳為高阻抗,支持熱插拔,實(shí)現(xiàn)上電/斷電無干擾運(yùn)行。
三、引腳配置與功能
| 引腳編號 | 引腳名稱 | 引腳類型 | 功能描述 |
|---|---|---|---|
| 1 | TXD | 數(shù)字輸入 | CAN發(fā)送數(shù)據(jù)輸入,集成上拉電阻 |
| 2 | GND | 接地 | 接地連接 |
| 3 | VCC | 電源 | 5V電源電壓 |
| 4 | RXD | 數(shù)字輸出 | CAN接收數(shù)據(jù)輸出,器件斷電時為三態(tài) |
| 5 | VIO | 電源 | I/O電源電壓,支持1.7V至5.5V |
| 6 | CANL | 總線輸入/輸出 | 低電平CAN總線輸入/輸出線 |
| 7 | CANH | 總線輸入/輸出 | 高電平CAN總線輸入/輸出線 |
| 8 | STB | 數(shù)字輸入 | 待機(jī)輸入,用于模式控制,集成上拉電阻 |
四、電氣特性與性能參數(shù)
4.1 絕對最大額定值
| 了解器件的絕對最大額定值對于確保器件的安全使用至關(guān)重要。TCAN1044AEV-Q1的絕對最大額定值包括電源電壓、I/O電壓、CAN總線電壓、差分電壓等參數(shù),具體如下: | 參數(shù) | 最小值 | 最大值 | 單位 |
|---|---|---|---|---|
| VCC(電源電壓) | -0.3 | 6 | V | |
| $V_{IO}$(I/O電平轉(zhuǎn)換電源電壓) | -0.3 | 6 | V | |
| VBUS(CAN總線電壓) | -58 | 58 | V | |
| VDIFF(CANH和CANL之間的最大差分電壓) | -45 | 45 | V | |
| VLogic Input(邏輯輸入端子電壓) | -0.3 | 6 | V | |
| VRXD(RXD輸出端子電壓范圍) | -0.3 | 6 | V | |
| IO(RXD)(RXD輸出電流) | -8 | 8 | mA | |
| TJ(結(jié)溫) | -40 | 175 | °C | |
| TSTG(存儲溫度) | -65 | 150 | °C |
4.2 ESD額定值
靜電放電(ESD)是電子器件常見的失效原因之一。TCAN1044AEV-Q1具有良好的ESD防護(hù)能力,其HBM(人體模型)和CDM(帶電器件模型)等級分別為:
- HBM:所有引腳為±4000V(3A類),CANH和CANL相對于GND為±10000V(3B類)
- CDM:所有引腳為±750V(C5類)
4.3 推薦工作條件
| 為了確保器件的性能和可靠性,建議在以下工作條件下使用TCAN1044AEV-Q1: | 參數(shù) | 最小值 | 典型值 | 最大值 | 單位 |
|---|---|---|---|---|---|
| VCC(電源電壓) | 4.5 | 5 | 5.5 | V | |
| $V_{IO}$(I/O電平轉(zhuǎn)換電源電壓) | 1.7 | 5.5 | V | ||
| OH(RXD)(RXD端子高電平輸出電流) | -1.5 | mA | |||
| OL(RXD)(RXD端子低電平輸出電流) | 1.5 | mA | |||
| TA(工作環(huán)境溫度) | -40 | 150 | °C |
4.4 其他特性參數(shù)
除了上述參數(shù)外,文檔還詳細(xì)介紹了TCAN1044AEV-Q1的熱特性、電源特性、耗散額定值、電氣特性和開關(guān)特性等參數(shù),這些參數(shù)對于深入了解器件的性能和進(jìn)行系統(tǒng)設(shè)計(jì)具有重要的參考價值。
五、功能描述與工作模式
5.1 CAN總線狀態(tài)
CAN總線在運(yùn)行過程中有兩種邏輯狀態(tài):隱性(Recessive)和顯性(Dominant)。顯性狀態(tài)對應(yīng)TXD和RXD引腳的邏輯低電平,隱性狀態(tài)對應(yīng)邏輯高電平。在仲裁過程中,顯性狀態(tài)會覆蓋隱性狀態(tài)。此外,TCAN1044AEV-Q1還支持低功耗待機(jī)(STB)模式,在此模式下,總線引腳通過接收器的高阻值內(nèi)部電阻弱偏置到地。
5.2 TXD顯性超時(DTO)
在正常模式下,當(dāng)TXD引腳保持顯性狀態(tài)超過$t_{TXD_DTO }$(1.2ms至4.0ms)時,TXD DTO電路會觸發(fā),禁用CAN驅(qū)動器,以防止本地節(jié)點(diǎn)因硬件或軟件故障而阻塞網(wǎng)絡(luò)通信。當(dāng)TXD引腳出現(xiàn)隱性信號時,CAN驅(qū)動器重新激活。
5.3 CAN總線短路電流限制
該器件具有多種保護(hù)功能,可限制CAN總線短路時的短路電流。在選擇CAN設(shè)計(jì)的終端電阻或共模扼流圈時,應(yīng)考慮平均短路電流$I{OS(AVG)}$,其計(jì)算公式為: $I{OS(AVG)} = %Transmit times [(%RECBits times I{OS(SS)_REC}) + (%DOMBits times I{OS(SS)_DOM})]$
5.4 熱關(guān)斷(TSD)
當(dāng)器件的結(jié)溫超過熱關(guān)斷閾值$T{TSD}$(175°C至210°C)時,器件會關(guān)閉CAN驅(qū)動器電路,阻止TXD到總線的傳輸路徑。當(dāng)結(jié)溫下降到$T{TSD}$以下時,關(guān)斷條件解除。
5.5 欠壓鎖定
$V{CC}$和$V{IO}$引腳具有欠壓檢測功能,當(dāng)任一電源引腳出現(xiàn)欠壓事件時,器件會進(jìn)入保護(hù)狀態(tài),以保護(hù)總線。具體的器件狀態(tài)和總線表現(xiàn)如下表所示:
| $V_{CC}$ | $V_{IO}$ | 器件狀態(tài) | 總線 | RXD引腳 |
|---|---|---|---|---|
| > UVvcc | > UVvio | 正常 | 隨TXD變化 | 反映總線狀態(tài) |
| < UVvcc | > UVvio | STB = High:待機(jī)模式 STB = Low:保護(hù)模式 |
弱偏置到地 高阻抗 |
$V_{IO}$:遠(yuǎn)程喚醒請求 隱性 |
| > UVvcc | < UVvio | 保護(hù) | 高阻抗 | 高阻抗 |
| < UVvcc | < UVvio | 保護(hù) | 高阻抗 | 高阻抗 |
5.6 工作模式
TCAN1044AEV-Q1具有兩種主要工作模式:正常模式和待機(jī)模式,通過STB引腳的高低電平進(jìn)行選擇。
- 正常模式:CAN驅(qū)動器和接收器完全工作,CAN通信雙向進(jìn)行。
- 待機(jī)模式:低功耗模式,CAN驅(qū)動器和主接收器關(guān)閉,雙向CAN通信不可用。低功耗接收器和總線監(jiān)控電路啟用,允許通過CAN總線進(jìn)行RXD喚醒請求。
六、應(yīng)用信息與設(shè)計(jì)建議
6.1 典型應(yīng)用
TCAN1044AEV-Q1可用于與包含CAN協(xié)議鏈路層部分的主機(jī)控制器或FPGA配合的應(yīng)用中,如車身控制模塊、汽車網(wǎng)關(guān)、高級駕駛輔助系統(tǒng)(ADAS)、信息娛樂系統(tǒng)等。
6.2 設(shè)計(jì)要求
- CAN終端:終端可以是總線兩端的單個120Ω電阻,也可以采用分裂終端以過濾和穩(wěn)定總線的共模電壓,提高網(wǎng)絡(luò)的電磁發(fā)射性能。
- 總線負(fù)載、長度和節(jié)點(diǎn)數(shù)量:典型的CAN應(yīng)用最大總線長度為40米,最大分支長度為0.3米。但通過精心設(shè)計(jì),用戶可以延長電纜長度和增加節(jié)點(diǎn)數(shù)量。TCAN1044AEV-Q1具有較高的輸入阻抗,理論上支持單個總線段上超過100個收發(fā)器,但實(shí)際應(yīng)用中需要考慮信號損失、寄生負(fù)載、時序等因素。
6.3 電源供應(yīng)建議
建議使用電壓范圍在4.5V至5.5V的$V{CC}$電源和1.8V至5.5V的$V{IO}$電源,并且兩個電源輸入都要進(jìn)行良好的穩(wěn)壓和濾波。在CAN收發(fā)器的$V{CC}$和$V{IO}$電源引腳附近應(yīng)放置一個典型值為100nF的去耦電容。
6.4 PCB布局建議
為了確保CAN節(jié)點(diǎn)的穩(wěn)健和可靠設(shè)計(jì),在PCB設(shè)計(jì)中應(yīng)采用高頻布局技術(shù),具體建議如下:
- 將保護(hù)和濾波電路靠近總線連接器放置,防止瞬態(tài)、ESD和噪聲傳播到電路板上。
- 設(shè)計(jì)總線保護(hù)組件時應(yīng)遵循信號路徑方向,避免瞬態(tài)電流繞過保護(hù)器件。
- 去耦電容應(yīng)盡可能靠近收發(fā)器的$V{CC}$和$V{IO}$電源引腳,并使用至少兩個過孔進(jìn)行電源和接地連接,以減少走線和過孔的電感。
七、總結(jié)
TCAN1044AEV-Q1作為一款高性能的汽車級CAN FD收發(fā)器,憑借其廣泛的標(biāo)準(zhǔn)兼容性、豐富的保護(hù)特性、靈活的I/O電壓支持和低功耗待機(jī)模式等優(yōu)點(diǎn),為汽車電子系統(tǒng)的設(shè)計(jì)提供了可靠的解決方案。在實(shí)際應(yīng)用中,工程師們需要根據(jù)具體的設(shè)計(jì)要求,合理選擇器件的工作模式、配置電源和進(jìn)行PCB布局,以充分發(fā)揮器件的性能優(yōu)勢,確保系統(tǒng)的穩(wěn)定運(yùn)行。
你在使用TCAN1044AEV-Q1或其他CAN收發(fā)器的過程中遇到過哪些問題?又是如何解決的呢?歡迎在評論區(qū)分享你的經(jīng)驗(yàn)和見解。
-
汽車電子
+關(guān)注
關(guān)注
3045文章
9048瀏覽量
173030
發(fā)布評論請先 登錄
具有待機(jī)模式和故障保護(hù)功能的TCAN1044A-Q1和TCAN1044AV-Q1汽車類CAN FD收發(fā)器數(shù)據(jù)表

具有1.8V I/O支持功能的TCAN1044AEV-Q1 0級故障保護(hù)CAN FD收發(fā)數(shù)據(jù)表
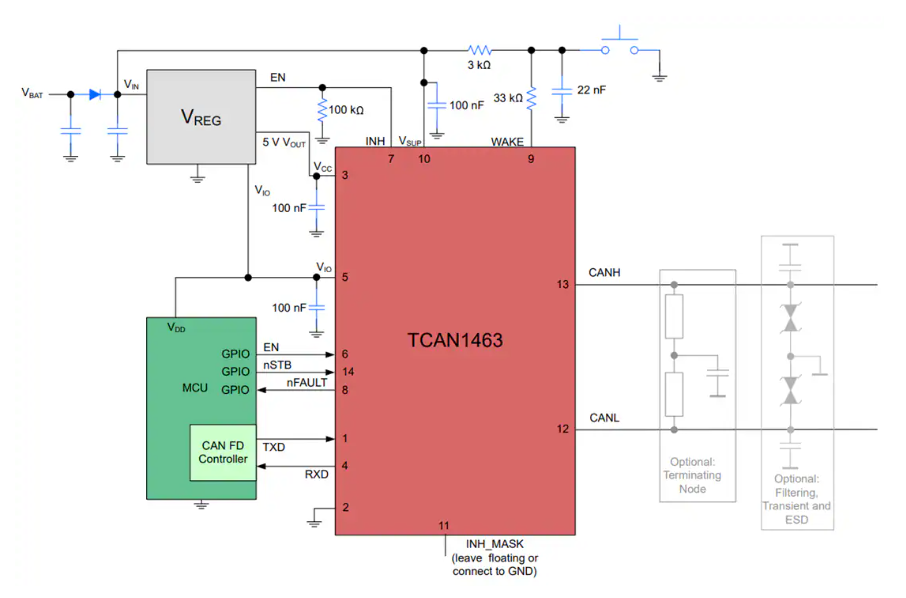
TCAN1463-Q1汽車級高速CAN FD收發(fā)器技術(shù)解析與應(yīng)用指南
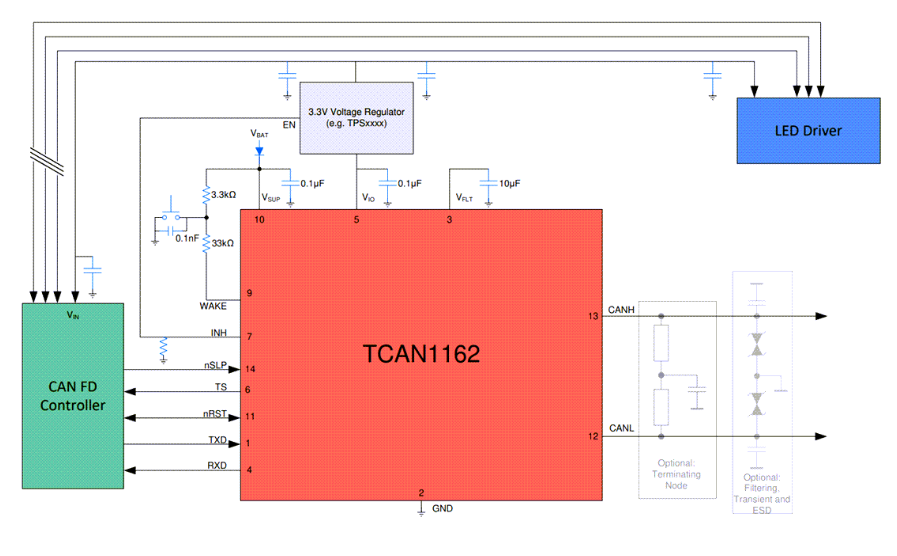
?TCAN1162-Q1汽車級CAN FD收發(fā)器技術(shù)解析
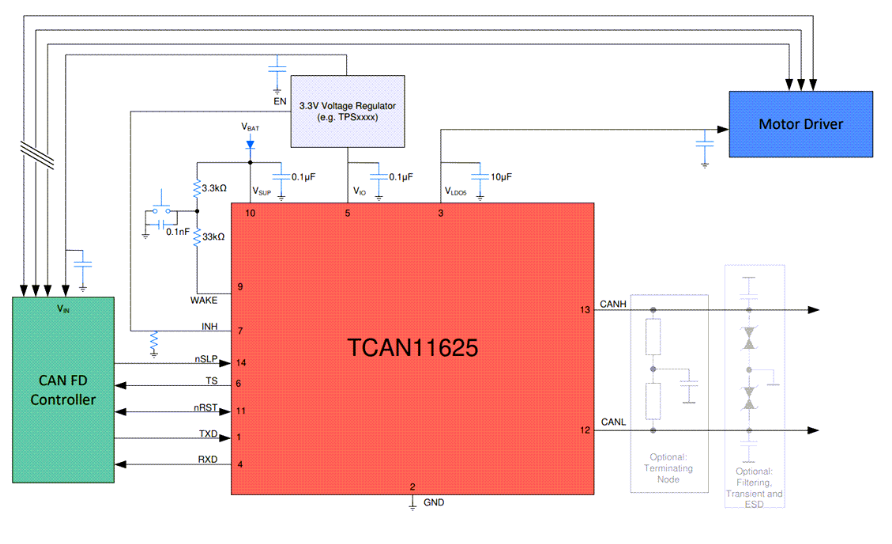
德州儀器TCAN1162x-Q1汽車級CAN FD收發(fā)器技術(shù)解析
Texas Instruments TCAN1043A-Q1汽車級CAN FD收發(fā)器技術(shù)解析
汽車級CAN FD收發(fā)器TCAN844-Q1:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)
TCAN1057AEV-Q1:汽車級CAN FD收發(fā)器的卓越之選
汽車級CAN FD收發(fā)器TCAN1044A-Q1:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)解析
汽車級CAN FD收發(fā)器TCAN1044-Q1:性能、應(yīng)用與設(shè)計(jì)要點(diǎn)詳解
汽車級雙CAN FD收發(fā)器TCAN1046-Q1:設(shè)計(jì)與應(yīng)用全解析
TCAN114x-Q1:高性能CAN FD收發(fā)器的技術(shù)剖析與應(yīng)用指南
TCAN1044DRQ1 汽車級高速 CAN 收發(fā)器




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論