") 從陀螺儀到NB-IoT:一款超低功耗智能井蓋終端的硬件與固件設(shè)計實踐
從陀螺儀到NB-IoT:一款超低功耗智能井蓋終端的硬件與固件設(shè)計實踐

在廣域物聯(lián)網(wǎng)(LPWAN)落地場景中,智能井蓋監(jiān)測是一個典型“高可靠性、超長壽命、極低功耗”需求的用例。本文拆解一款已在多個城市規(guī)模部署的智能井蓋終端,分析其如何通過多傳感器融合 + 事件驅(qū)動架構(gòu) + 深度休眠策略,實現(xiàn)10年電池壽命與秒級告警響應的平衡。
1. 傳感層:不止于傾角檢測
傳統(tǒng)方案僅用加速度計判斷位移,但易受車輛碾壓干擾。該終端采用6軸MEMS陀螺儀(如ICM-20602),同時采集三軸加速度與三軸角速度。通過融合算法(互補濾波),可精準識別:
靜態(tài)傾斜(如井蓋被撬起);
動態(tài)翻轉(zhuǎn)(如被沖走);
整體位移(如地基沉降)。
此外,預留2路數(shù)字量輸入(DI)接口,支持外接干簧管式水浸探頭、門磁開關(guān)或溫度開關(guān),實現(xiàn)多維狀態(tài)感知。

2. 主控與低功耗設(shè)計:微安級休眠是關(guān)鍵
主控選用超低功耗MCU(如STM32L476RG),其STOP2模式下電流僅0.8μA。系統(tǒng)工作流程如下:
上電初始化后,立即進入深度休眠;
陀螺儀配置為運動中斷輸出(Motion INT),當檢測到超過閾值的角速度變化,拉低INT引腳喚醒MCU;
MCU讀取傳感器數(shù)據(jù),經(jīng)軟件濾波(時間窗口+幅度驗證)確認異常后,啟動通信模塊;
通信完成后,系統(tǒng)再次進入休眠。
實測表明,日均告警<1次時,整機年均功耗<150μA,配合19Ah鋰亞電池,理論壽命>10年。
3. 通信層:NB-IoT穿透地下井室
井下信號衰減嚴重,終端采用全網(wǎng)通NB-IoT模組(如BC95/BC25),支持Band3/Band5/Band8,確保全國覆蓋。為提升弱網(wǎng)可靠性:
采用CoAP over UDP協(xié)議,減少空中傳輸時間;
數(shù)據(jù)包結(jié)構(gòu)精簡(JSON壓縮至<100字節(jié));
支持自動重傳(最多3次),失敗后本地緩存,待信號恢復再上報。
單次告警通信耗時<8秒,消耗電量約30mAs,對整體壽命影響極小。
4. 固件策略:防誤報與遠程維護
為避免震動誤觸發(fā),固件實現(xiàn)雙重驗證:
if (gyro_magnitude > THRESHOLD && duration > 2000ms) {
trigger_alert();
}
同時支持FOTA遠程升級,通過差分更新(Delta Update)將固件包控制在20KB內(nèi),降低流量消耗。
設(shè)備還定期上報健康狀態(tài)(電壓、信號強度、傳感器自檢結(jié)果),便于平臺預判故障。
5. 結(jié)語:邊緣智能的務實落地
這款終端沒有堆砌AI或5G,而是聚焦可靠感知 + 極致低功耗 + 開放協(xié)議,在真實城市場景中驗證了LPWAN終端的工程可行性。對開發(fā)者而言,其架構(gòu)可復用于電力井、閥門箱、邊坡監(jiān)測等類似場景——畢竟,在物聯(lián)網(wǎng)領(lǐng)域,能穩(wěn)定工作10年的設(shè)備,比能跑大模型的設(shè)備更稀缺。
審核編輯 黃宇
-
智能井蓋
+關(guān)注
關(guān)注
0文章
37瀏覽量
5755 -
NB-IoT
+關(guān)注
關(guān)注
414文章
1455瀏覽量
191142
發(fā)布評論請先 登錄
LoRa、LoRaWAN、NB-IoT、4G DTU 有什么區(qū)別? 工業(yè)無線方案選型分析
STM32H5開發(fā)陀螺儀LSM6DSV16X(1)----輪詢獲取陀螺儀數(shù)據(jù)

多軸陀螺儀怎么選?

羅德與施瓦茨NB-IoT NTN終端測試解決方案

NB-IoT 網(wǎng)絡(luò)對功耗的真實影響:Otii實測 Thales 模組的注冊與連接行為全解析
NB-IoT無線模組咨詢
什么是光纖陀螺儀?陀螺儀有哪些作用?
MEMS陀螺儀有哪些分類?
MEMS陀螺儀正在取代光纖陀螺儀?
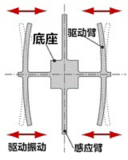
振動陀螺儀傳感器的工作原理
MEMS陀螺儀的尋北原理是什么?精度如何?

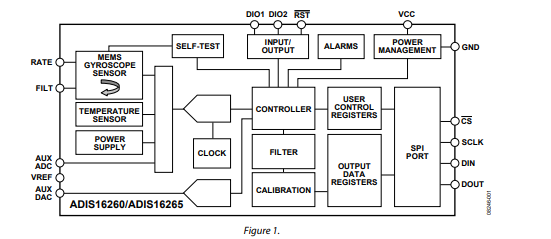
ADIS16260 ADIS16265可編程低功耗陀螺儀技術(shù)手冊
NB-IoT模組選型指南:2025十大NB窄帶傳輸設(shè)備品牌廠家盤點與應用方案解析
智能關(guān)停,高速風筒方案中陀螺儀技術(shù)的精準應用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論