 【HPMicro inside】高爆發氮化鎵關節電機驅動方案
【HPMicro inside】高爆發氮化鎵關節電機驅動方案

本文導讀
JMD101是一款基于EtherCAT通信的高爆發關節電機驅動模塊,面向高端工業/機器人場景,集電源、驅動、通信與控制技術于一體,專為實現高精度運動控制和瞬時大扭矩輸出而設計。
JMD101采用3kW大功率架構,可滿足重載啟動、急加速等嚴苛工況需求。驅動部分突破性選用第三代半導體氮化鎵器件,依托其寬禁帶材料帶來的耐高溫、高頻開關特性,在相同體積下實現了功率密度的顯著提升。通信系統集成EtherCAT工業總線,支持微秒級響應與靈活拓撲組網。模塊配備21位超高精度絕對值編碼器,并結合位置、速度、力矩、零扭力等多種控制模式,特別針對突發瞬時負載工況開發“高爆發”控制算法,可短時輸出2-3倍額定扭矩。

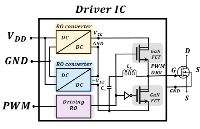
方案特性·電源:采用48V-72V直流電源輸入,支持額定電流40A、瞬態電流100A,額定功率3kW,瞬態功率可達7kW;·處理器:高性能雙核RISC-V處理器,主頻高達600MHz;·驅動:搭載第三代半導體氮化鎵驅動單元,具有高頻、高效、耐高溫、高功率密度等優勢,滿足小體積高功率應用需求;
·通信:集成EtherCAT通信技術,實現微秒級實時響應,兼具低延時、高帶寬與靈活組網特性,支持高效數據傳感與交互;
·編碼器:配備2個21位高精度絕對值編碼器,實現精準位置反饋;
·性能:具備位置、速度、力矩、零扭力、阻尼及組合控制模式,支持“高爆發”動態運行工況。
測試分享測試EtherCAT通信從機間的DC抖動時間指令響應時間,多次測量,指令響應時間小于100ns,相鄰從站DC抖動時間小于23.2ns。

HPM6E8Y MCU介紹
高性能RISC-V雙核,主頻高達600MHz
高達 2MB SRAM,4MB FLASH, 4Kb OTP
EtherCAT Slave控制器,3個MAC端口
1個千兆以太網MAC控制器
2個100Mbps以太網PHY
32通道高分辨率PWM控制器,100ps
串行編碼器輸入/輸出:支持多摩川,BISS-C,ENDAT等
8個CAN-FD接口
4個16b SAR ADC
2個4通道ΣΔ濾波器
289MAPBGA,14x14,0.8 pitch
196MAPBGA,12x12,0.8 pitch
工作溫度:-40 ~ 105?C TA

測試演示視頻JMD101模塊安裝于關節電機校準后測試,電機安裝到測功機測試平臺,設定測功機輸出40Nm,設定轉速,電機運行,測試相電流波形,最大相電流峰值31A,最小相電流峰值-27A,機械功率達786W。
JMD101模塊安裝于關節電機校準后測試,帶載10KG往返,使用千分尺測試電機的定位精度,關節電機減速箱齒輪間隙16ArcMin,定位精度測試15um左右。
-
半導體
+關注
關注
339文章
30816瀏覽量
264792 -
電機驅動
+關注
關注
60文章
1460瀏覽量
89541 -
氮化鎵
+關注
關注
67文章
1896瀏覽量
119841
發布評論請先 登錄
遠程遙操作人形機器人功率鏈路優化:基于高壓母線、關節驅動與精密控制的MOSFET精準選型方案

扭矩之源:解析關節電機線圈如何實現機器人的柔順運動
半橋驅動SiLM2026EN-DG DFN3x3小封裝,輕松搞定200V機器人關節電機
采用DFN3×3封裝SiLM2026EN-DG 200V半橋驅動器,如何實現機器人關節的高效緊湊驅動?
Leadway電機方案的優點
散熱降低一半,功率密度翻番!氮化鎵如何讓機器人“冷靜”地爆發?

人形機器人關節電機:永磁電機類型解析

如何在開關模式電源中運用氮化鎵技術
PD 20W氮化鎵單電壓應用方案概述
專為電機驅動打造!納微全新GaNSense?氮化鎵功率芯片為家電及工業應用帶來行業領先的性能、效率與可靠性

基于氮化鎵的碳化硅功率MOSFET高頻諧振柵極驅動器
氮化鎵電源IC U8765產品概述




 工商網監
工商網監
評論