 采用MSP430F169單片機實現光電跟蹤裝置的設計
采用MSP430F169單片機實現光電跟蹤裝置的設計

引言
MSP430 單片機具有集成度高、嵌入模塊多(如12位ADC、16位定時器等)、超低功耗等特點,在許多領域內得到了廣泛的應用。對于一個伺服系統,要經過信號的采集、轉換、信號數字處理、信號控制等環節來完成指定任務。信號的采集過程和處理是一個重要的環節,基于MSP430 光電跟蹤伺服系統,一方面利用MSP430 單片機外設多的特點,盡可能使用一片芯片,實現信號的采集、定時處理、PID算法、PWM 驅動,實現高精度測量的跟蹤,另一方面,利用低功耗的特點實現小型化。
1 光電跟蹤的基本原理
MSP430F169控制的光電跟蹤伺服系統示意圖如圖1所示,其特點是采用MSP430F169作為中央處理單元和控制器。
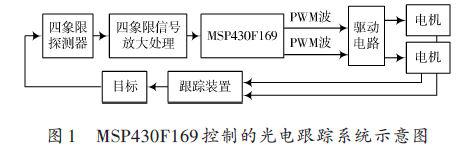
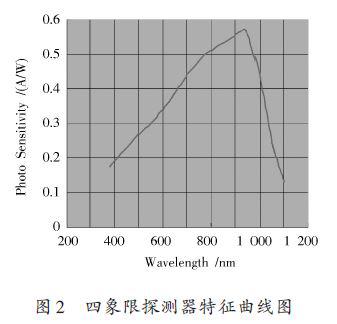
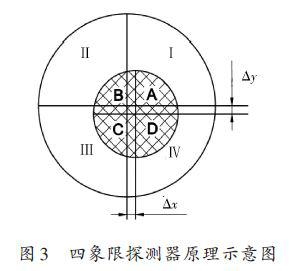
系統通過一個四象限光電探測器,其可探測到的波長范圍是380~1 100 nm,當波長為940 nm時,輸出的光功率達到峰值。四象限探測器特性曲線圖如圖2 所示。四象限探測器的感光面的對稱中心與直角坐標的零點O 重合,其正交方向分別對應x 和y 坐標軸,并將感光面劃分為四個象限陣元,四象限探測器原理示意圖如圖3所示。根據跟蹤光斑在四象限的感光量不同,可以計算出跟蹤目標的偏差。當跟蹤光斑中心與四象限中心重合時,對應著探測器的每個象限接收到的光信號強度相等,經計算處理后得到的偏差信號,即誤差信號為零,以確定跟蹤對準。根據四象限探測器的特點,四象限接收到光信號后轉換成四路電流信號輸出,通過I-V 轉換電路,將電流信號轉換成四路電壓信號Ex1 ,Ex2 ,Ey1 ,Ey2 ,將電壓信號進行濾波及放大處理,利用MSP430F169內部的AD轉換器采集數據,將采集到的電壓信號經運算并歸一化處理,然后采用自適應PID 算法,計算出坐標偏移量Δx 和Δy ,并通過定時器產生PWM波的占空比來調節電機的速度,使電機能夠平緩地到達目標位置。
2 硬件部分設計
硬件電路結構可分為:電源模塊、控制模塊、四象限探測器與成像模塊、信號預處理、驅動電路等部分。
2.1 電源模塊
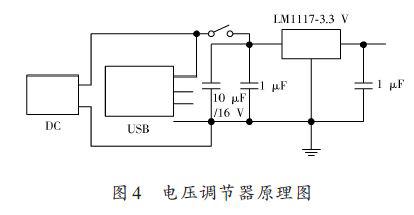
整個系統采用+5 V 作為主供電系統,為了保證數字系統的+3.3 V電源供電,使用LM1117電壓調節器得到紋波抑制比高的電壓輸出,如圖4所示。
2.2 四象限放大及濾波處理
激光探測電路的噪聲包括外部擾動和內部噪聲。
外部擾動主要來自于激光發射器、光路傳播介質、背景光以及電路本身。這些擾動可以通過先進行背景環境的測量來改善或者消除。內部噪聲是與待測信號并存的,可以濾波的方法抑制噪聲。
目標信號處理電路如圖5所示。
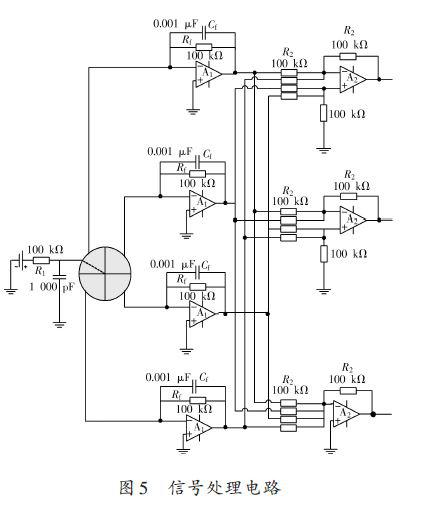
由于內部噪聲的存在,并要在噪聲進入放大電路之前濾除,則在光電探測器的陰極加上濾波電路。其截止頻率fc=1 /(RfC)。
令fc=10 kHz,采用一階濾波器,則有C=0.001 μF,R=1 /(Cfc) =100 kΩ。
將A,B,C,D四路電流信號分別經過四個運放轉換成四路電壓信號。增大OP放大器的反饋電阻時,會引起干擾振蕩。OP放大器有數pF到數十pF的輸入寄生電容Cin,會使OP放大器的穩定性變差,產生自激振蕩。在OP放大器中加入輸入電容,電阻Rf和Cin構成一個新的頻率轉折點。為了防止自激振蕩,用電容Cf與反饋電阻Rf并聯。電容Cf有相位超前的作用,對轉折點而言就是零點,零點頻率fz=1 /(2πCf Rf ) .
通常,Cf>Cin,Cin約為5~6 pF.這里取Cf =0.001 μF.
將處理得到的電壓信號通過加法、減法運算電路[5],利用MSP430內部的運算能力進行歸一化處理,這樣就能避免除法器的設計。
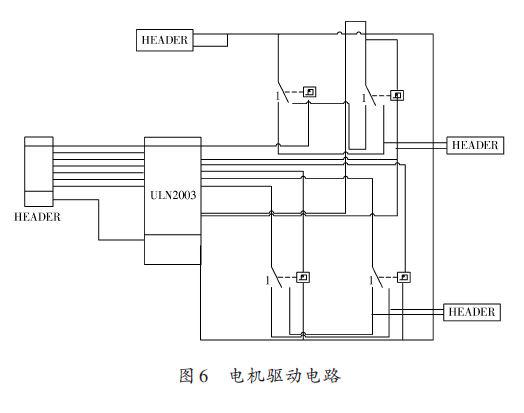
2.3 電機驅動模塊
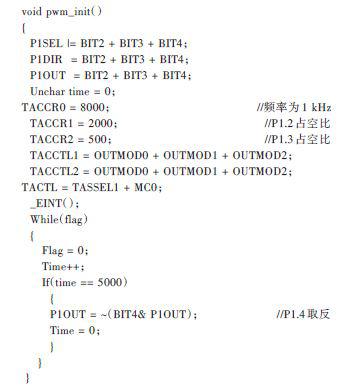
利用橋式電路來驅動直流電機,用PWM 波控制電機的轉速,另外用單片機的I/O端口控制其正反轉。電機驅動電路如圖6所示。
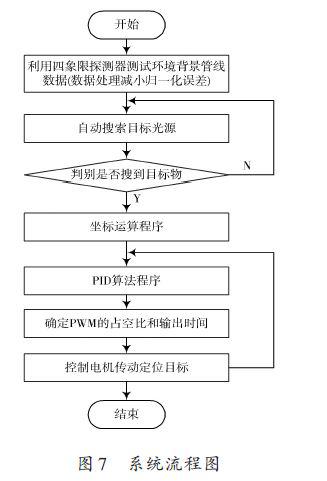
3 系統控制
軟件部分主要包括:測量環境背景光線數據、自動搜索目標物、AD采樣、坐標運算、PID算法、驅動電機。單片機端的主程序使用了循環查詢的方式來決定當前應該執行的任務。主程序主要完成內部ADC,Timer,PWM初始化,采集的數據歸一化。其流程圖如圖7所示。
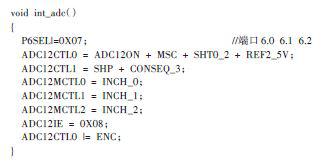
3.1 A/D采集
四象限光電探測器接收的信號進過濾波、放大、加法運算、減法運算處理后,輸出三路電壓信號,因此采用MSP430F169的三通道多次采集,程序如下:
3.2 ADC轉換
利用公式:
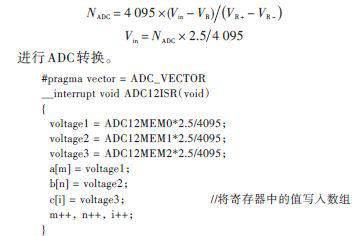
進行ADC轉換。
3.3 驅動電機模塊
電機運動分為搜索目標物以及跟蹤目標物兩個部分,程序如下:
跟蹤目標物的過程中,將采集到的數據使用位置式PID算法:

式中:u(k) 為采樣時刻k 時的輸出值;e(k) 為采樣時刻k時的偏差值; e(k - 1) 為采樣時刻k - 1 時的偏差值;u0為t =0時刻對應的輸出值。
采用位置式PID 算式,當達到設定的門限值之后再加入積分運算,這樣就能夠避免積分飽和問題。
4 實驗
以波長為650 nm 激光作為目標物,首先目標物是靜止的,此時跟蹤伺服設備進行空間搜索的過程。待設備搜索到目標物之后,目標物開始移動,這時光斑中心與四象限中心不重合,單片機采集到數據后進行運算,輸出PWM 波使電機開始轉動,這樣就能使設備跟著目標物運動。實驗裝置如圖8所示。
5 結論
本設計采用性能優越的MSP430F169 作為控制核心。使用MSP430內部的AD模塊以及定時器模塊能夠實現精準的多路數據采集。外圍電路的設計,利用RC濾波器,減小噪聲對信號的影響,同時利用相位補償技術消除了自激干擾,使信號穩定輸出。軟件部分采用位置式PID算式,當達到設定的門限值之后再加入積分運算,這樣就能夠避免積分飽和問題,使跟蹤設備平緩地到達指定位置。
-
單片機
+關注
關注
6076文章
45497瀏覽量
670552 -
探測器
+關注
關注
15文章
2763瀏覽量
75910 -
定時器
+關注
關注
23文章
3368瀏覽量
123689
發布評論請先 登錄



 工商網監
工商網監
評論