") 告別“完美同軸”執(zhí)念,MT6709離軸角度檢測(cè)解碼芯片:校準(zhǔn)補(bǔ)償、精準(zhǔn)檢測(cè)
告別“完美同軸”執(zhí)念,MT6709離軸角度檢測(cè)解碼芯片:校準(zhǔn)補(bǔ)償、精準(zhǔn)檢測(cè)

前言
傳統(tǒng)傳感器解決方案執(zhí)著于“物理完美對(duì)齊”的執(zhí)念,要求磁鐵與傳感器芯片同軸貼合,試圖成為物理世界的完美鏡子,任何鏡像偏差都被視為缺陷,這不僅抬高了機(jī)械設(shè)計(jì)與裝配的門檻,更讓許多復(fù)雜工況下的精準(zhǔn)檢測(cè)成為難題。而MT6709,則像是一個(gè)“理解者”——它接受現(xiàn)實(shí)世界的不完美,通過對(duì)外部模擬信號(hào)進(jìn)行角度解碼計(jì)算并補(bǔ)償偏差,實(shí)現(xiàn)精準(zhǔn)的離軸(Off-Axis)0~360°絕對(duì)角度檢測(cè),適應(yīng)現(xiàn)實(shí)場(chǎng)景的偏差與復(fù)雜性。
一技術(shù)解碼:重構(gòu)信號(hào)鏈
MT6709作為一款針對(duì)外部線性霍爾輸入的正、余弦模擬信號(hào)進(jìn)行角度計(jì)算的解碼芯片,一個(gè)強(qiáng)大的“信號(hào)翻譯與校正中樞”,其工作流程清晰而高效:
1、信號(hào)采集:當(dāng)轉(zhuǎn)動(dòng)軸帶動(dòng)一個(gè)簡(jiǎn)單的單對(duì)極磁環(huán)(一個(gè)N極、一個(gè)S極)旋轉(zhuǎn)時(shí),周圍四顆互成90°對(duì)稱布置的線性霍爾芯片會(huì)感應(yīng)并輸出原始的差分正、余弦模擬信號(hào),這些信號(hào)會(huì)被MT6709接收。
2、信號(hào)預(yù)處理:接收的模擬信號(hào)會(huì)經(jīng)MT6709的內(nèi)置儀表放大器放大、濾波,至ADC中。
3、模數(shù)轉(zhuǎn)化與計(jì)算:信號(hào)經(jīng)高性能ADC數(shù)字量化后,送入DSP單元,通過校準(zhǔn)參數(shù)補(bǔ)償失調(diào)、幅度及相位誤差,解碼出17位絕對(duì)角度數(shù)據(jù)。
4、多形式輸出:角度數(shù)據(jù)可通過3線SPI直接讀取,或編碼為增量ABZ、電機(jī)換相UVW、簡(jiǎn)化PWM信號(hào),適配不同主控系統(tǒng)。
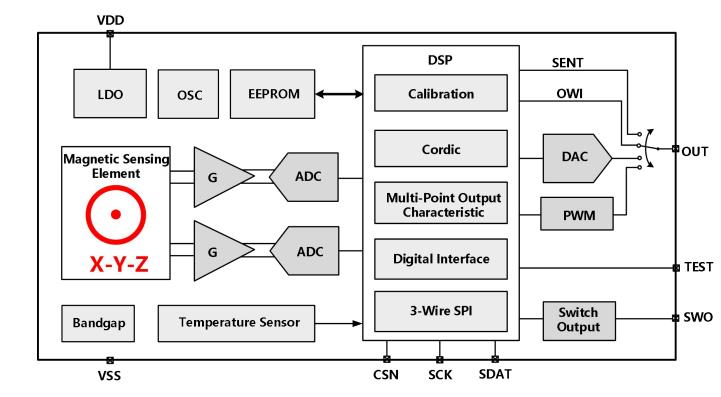
此外,MT6709芯片還采用高集成化設(shè)計(jì),功能系統(tǒng)中除低壓差穩(wěn)壓模塊(LDO)、時(shí)鐘振蕩器(OSC)外,還包含:
EEPROM:3.0~5.5V用戶可編程的電可擦除可編程存儲(chǔ)器模塊,數(shù)據(jù)保存時(shí)間達(dá)10年(150℃下),擦寫次數(shù)≥100次;
模擬前端:儀表放大器+抗混疊濾波器,確保模擬信號(hào)完整性;
診斷模塊:實(shí)時(shí)監(jiān)測(cè)信號(hào)幅度、電源電壓、EEPROM數(shù)據(jù),通過STATUS/FAULT引腳輸出狀態(tài);
配置寄存器:支持通過SPI編程校準(zhǔn)模式、輸出分辨率、零位位置等參數(shù)。

原理圖

功能框圖
二自動(dòng)校準(zhǔn):精度補(bǔ)償升級(jí)
MT6709的核心優(yōu)勢(shì)在于提供了用戶端簡(jiǎn)潔自校準(zhǔn)模式——無需和MT6709芯片進(jìn)行數(shù)據(jù)交互、無需參考源,只需運(yùn)動(dòng)若干周期,就可以補(bǔ)償外部輸入的正、余弦信號(hào)的失調(diào)、幅度和相位等誤差,校準(zhǔn)后INL可達(dá)±0.2°。該模式要求磁環(huán)連續(xù)轉(zhuǎn)動(dòng),但可以是非勻速的,具體步驟為:
1、安裝固定好芯片和磁環(huán)的相對(duì)位置;
2、確保輸入信號(hào)能夠在40周期/分鐘~3000周期/分鐘這個(gè)速度區(qū)間,保持16個(gè)周期;
3、通過將CAL-ENB引腳拉低(或?qū)⒓拇嫫鳌癝OFT-AUTOCAL”寫1),使得芯片進(jìn)入自校準(zhǔn)狀態(tài);然后通過STATUS引腳輸出的PWM波形,或者“CAL-STATE”寄存器的值,來判斷芯片的自校準(zhǔn)狀態(tài)。自校準(zhǔn)成功,芯片會(huì)自動(dòng)保存校準(zhǔn)參數(shù),結(jié)束后需等待500ms,再將CAL-ENB引腳拉高或者將“SOFT-AUTOCAL”寄存器寫0,以退出自校準(zhǔn)模式;
4、若校準(zhǔn)失敗需再次校準(zhǔn),需給MT6709重新上電。
同時(shí)MT6709還提供用戶端勻速自校準(zhǔn)模式,可進(jìn)一步補(bǔ)償INL至±0.1°。該模式需將磁環(huán)和芯片固定好后,通過配置寄存器“AUTO_CAL_MODE”的值(0×4)使得芯片處于勻速自校準(zhǔn)模式(芯片出廠默認(rèn)配置為簡(jiǎn)潔自校準(zhǔn)模式),確保按角度輸出增加的方向勻速運(yùn)行;磁環(huán)勻速運(yùn)動(dòng)起來后,可通過配置“AUTO_CAL_FREQ”寄存器,來選擇合適的轉(zhuǎn)速區(qū)間,之后步驟與簡(jiǎn)潔自校準(zhǔn)模式一致。
三性能維度:全方位接口與卓越可靠性
工業(yè)領(lǐng)域的一個(gè)現(xiàn)實(shí)困境是協(xié)議碎片化,而MT6709的魅力在于它提供了一個(gè)全面而靈活的數(shù)據(jù)輸出生態(tài)系統(tǒng),能無縫對(duì)接各種主控系統(tǒng):
核心數(shù)據(jù):提供17位高分辨率的絕對(duì)角度數(shù)據(jù),可通過3線SPI接口直接讀取,支持鎖存角度功能,數(shù)據(jù)刷新標(biāo)志位可配置,滿足對(duì)絕對(duì)位置信息有苛刻要求的應(yīng)用。
增量編碼:可生成最高2500脈沖/周期或10000步/周期的ABZ增量信號(hào),且任意整數(shù)分辨率用戶可編程,完美兼容市場(chǎng)上絕大多數(shù)伺服驅(qū)動(dòng)器與控制器。
電機(jī)驅(qū)動(dòng):提供可編程的UVW換相信號(hào)輸出,分辨率支持1至63對(duì)極/周期,可直接用于無刷直流(BLDC)電機(jī)的換相控制。
簡(jiǎn)化通信:還提供單線PWM輸出,能以12位分辨率傳輸角度信息,為資源有限的微控制器系統(tǒng)提供了簡(jiǎn)潔的選擇。
在可靠性方面,MT6709遵循工業(yè)與汽車電子級(jí)的標(biāo)準(zhǔn)。它工作電壓范圍覆蓋3.0V至5.5V;工作溫度橫跨-40℃至125℃的嚴(yán)苛環(huán)境;靜電防護(hù)(ESD)能力超過4000V;采用緊湊的QFN7×7封裝,在惡劣的電氣與物理環(huán)境中也能穩(wěn)定運(yùn)行。同時(shí)MT6709低延遲高穩(wěn)定:勻速工況下系統(tǒng)延時(shí)<2us;瞬態(tài)噪聲0.01°rms;遲滯窗口0.022°(多檔可編程)。還具備實(shí)時(shí)診斷功能:通過STATUS和FAULT中斷引腳實(shí)時(shí)輸出芯片工作狀態(tài)和診斷信息,提升系統(tǒng)可靠性。
產(chǎn)品參數(shù)表
| 工作電壓 | 3.0~5.5V |
| 功耗 | 20mA |
| 工作溫度 | -40℃~125℃ |
| 分辨率 | 17位 |
| PWM輸出 | 12bit/周期 |
| ABZ增量輸出 | 1~2500脈沖/磁對(duì)極(可編程) |
| UVW增量輸出 | 1~63對(duì)極/磁對(duì)極(可編程) |
| 系統(tǒng)延時(shí)(勻速時(shí)) | <2us |
| ESD防護(hù) | VHBM:±6.0kV;VCDM:±1.0kV |
| 封裝 | QFN7×7 |

封裝外觀圖
四
應(yīng)用場(chǎng)景
工業(yè)自動(dòng)化領(lǐng)域:協(xié)作機(jī)器人關(guān)節(jié)角度反饋(離軸安裝降低機(jī)械設(shè)計(jì)難度)、傳送帶位置控制、旋轉(zhuǎn)平臺(tái)定位;建議電源端并聯(lián)≥0.1μF去耦電容,加TVS管提升EMC性能。
電機(jī)控制領(lǐng)域:無刷直流電機(jī)、永磁同步電機(jī)的轉(zhuǎn)子位置檢測(cè),幫助實(shí)現(xiàn)精確的磁場(chǎng)定向控制。
汽車電子領(lǐng)域:電子助力轉(zhuǎn)向系統(tǒng)、油門踏板位置檢測(cè)、懸架高度測(cè)量等汽車應(yīng)用,寬溫與高ESD防護(hù),適配車載惡劣環(huán)境。
消費(fèi)電子領(lǐng)域:旋鈕控制、游戲設(shè)備、健身器材等需要角度測(cè)量的消費(fèi)類產(chǎn)品,緊湊封裝、低功耗電流適配消費(fèi)電子領(lǐng)域。
離軸應(yīng)用:在無法對(duì)軸安裝的特殊機(jī)械結(jié)構(gòu)中,MT6709配合適當(dāng)?shù)拇怕吩O(shè)計(jì),能夠?qū)崿F(xiàn)精確的離軸角度檢測(cè)。

典型應(yīng)用參考電路
五
結(jié)語(yǔ):國(guó)產(chǎn)優(yōu)選
MT6709等離軸方案的出現(xiàn),不僅是傳感芯片技術(shù)的升級(jí),更詮釋了新的發(fā)展理念——不再是追求“絕對(duì)理想的物理適配”,而是通過智能算法與集成化設(shè)計(jì),適配現(xiàn)實(shí)場(chǎng)景的多樣性與復(fù)雜性。從工業(yè)機(jī)器人的關(guān)節(jié)運(yùn)動(dòng)到汽車的轉(zhuǎn)向系統(tǒng),從消費(fèi)電子的旋鈕到特種機(jī)械的定位,MT6709憑借“寬電壓、高防護(hù)、多輸出、易校準(zhǔn)”的綜合優(yōu)勢(shì),成為國(guó)產(chǎn)角度檢測(cè)芯片的優(yōu)選方案之一。
-
傳感器
+關(guān)注
關(guān)注
2576文章
55029瀏覽量
791246 -
解碼芯片
+關(guān)注
關(guān)注
7文章
62瀏覽量
23019
發(fā)布評(píng)論請(qǐng)先 登錄
在機(jī)器視覺中,同軸光源有哪些款式?

基于AMR技術(shù)的麥歌恩MT6835磁性編碼器實(shí)現(xiàn)±0.07°精度突破

同軸光源:機(jī)器視覺的"精準(zhǔn)之眼",破解高反光表面檢測(cè)難題
國(guó)產(chǎn)離軸芯片標(biāo)桿!MT6728:21位高分辨率+自校準(zhǔn),離軸也精準(zhǔn)

國(guó)產(chǎn)離軸芯片標(biāo)桿!MT6728:21位高分辨率+自校準(zhǔn),離軸也精準(zhǔn)

告別“完美同軸”執(zhí)念,MT6709離軸角度檢測(cè)解碼芯片:校準(zhǔn)補(bǔ)償、精準(zhǔn)檢測(cè)

MT6620傳感器IC:讓復(fù)雜場(chǎng)景的解決方案變簡(jiǎn)單
MT6620傳感器IC:讓復(fù)雜場(chǎng)景的解決方案更簡(jiǎn)單

氣密性檢測(cè)儀校準(zhǔn)技術(shù)指南

MT652x 多維感知賦能汽車級(jí)應(yīng)用,國(guó)產(chǎn)磁性角度傳感器芯片
精準(zhǔn)高效:掌握三坐標(biāo)測(cè)頭角度快速識(shí)別方法

離軸技術(shù):賦能無人機(jī)精準(zhǔn)配送的核心芯片應(yīng)用
MT6501在線編程功能:賦能汽車應(yīng)用角度傳感系統(tǒng)級(jí)校準(zhǔn)與補(bǔ)償
氣密性檢測(cè)設(shè)備的檢測(cè)結(jié)果不精準(zhǔn)?不實(shí)

氣密性檢測(cè)儀校準(zhǔn)規(guī)范詳解




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論