 基于FPGA與CAN總線控制器的自適應汽車前照燈系統的設計
基于FPGA與CAN總線控制器的自適應汽車前照燈系統的設計

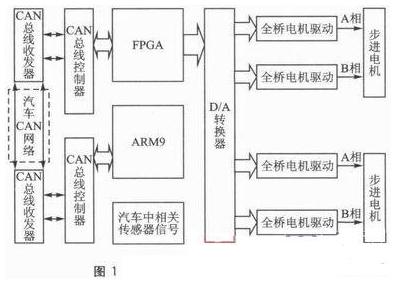
此系統中的前照燈控制器采用FPGA來控制CAN總線控制器、數/模轉換器和全橋電機驅動器等器件來實現接收方向盤轉角信號,并使電機運行帶動前照燈的轉向。自適應前照燈系統控制中心使用的是ARM9處理器。
引言
本設計采用了嵌入式技術來實現,嵌入式技術不僅廣泛地應用于汽車行業,而且在工業自動化、監控系統、醫療儀器等領域也有廣泛應用。
1 系統原理設計
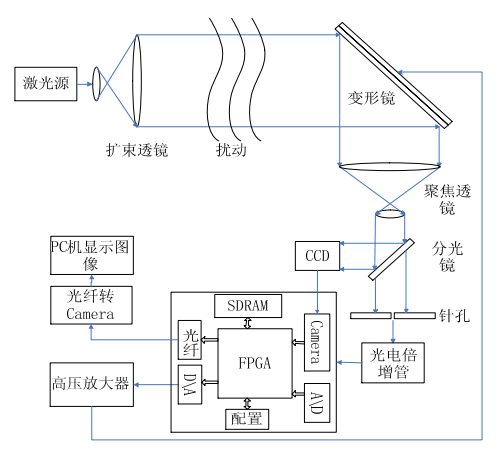
本文介紹的汽車前照燈轉向控制器主要是由FPGA、D/A轉換器、CAN總線控制器和電機驅動芯片等器件組成的。它的設計分為CAN總線控制器模塊和電機驅動模塊兩部分,由FPGA來控制并連接這兩個模塊。CAN總線控制器模塊實現接收CAN報文包消息,FPGA通過處理CAN報文包消息來控制電機驅動模塊使左右電機分別轉動。汽車前照燈轉向控制中心使用的是ARM9處理器,它主要處理相關傳感器的信息并根據相應的自適應算法計算出前照燈轉角角度。系統的架構圖如圖1所示。
2 硬件設計
2.1 CAN總線結點控制器模塊
本模塊設計中的CAN總線結點控制器模塊主要是由FPGA、CAN總線控制器、CAN總線收發器和一些外圍電路實現的。CAN總線通信的核心是CAN總線控制器,由它完成CAN總線的通信協議,實現物理層和數據鏈路層的所有功能。CAN總線收發器按照BOSCH CAN總線標準將0或1邏輯信號轉換為標準中規定的電平。本設計中選用了MICroChip公司開發的CAN總線控制器MCP2510和CAN總線收發器MCP2551.CAN總線結點控制器模塊電路原理圖如圖2所示。
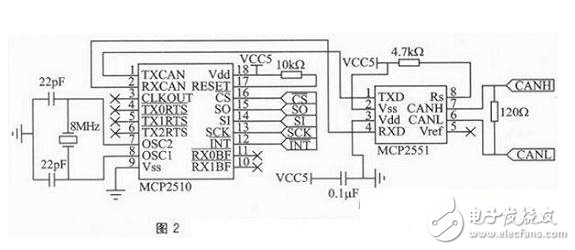
Microchip公司生產的MCP2510是一款控制器局域網絡(CAN)協議控制器,完全支持CAN總線V2.0 A/B技術規范。該器件支持CAN1.2、CAN2.0A、主動和被動CAN2.0B等版本的協議,能夠發送和接收標準和擴展報文。它還同時具備驗收過濾以及報文管理功能。該器件包含三個發送緩沖器和兩個接收緩沖器,減少了單片機(MCU)的管理負擔。MCU的通信是通過行業標準串行外設接口(SPI)來實現的,其數據傳輸速率高達5 Mb/s.
圖2中
、SO、SI、SCK、
接口與FPGA引腳接口相連,FPGA通過與
、SO、SI、SCK相連的引腳實現SPI接口,并與MCP2510中斷信號接口INT結合來完成對MCP2510的控制。CANH和CANL連接到CAN總線網絡中。
2.2 電機驅動模塊
本模塊設計主要由FPGA、D/A轉換器、電機功率驅動器組成,通過FPGA控制D/A轉換器、電機功率驅動器實現步進電機的細分驅動技術,從而完成對步進電機的控制。本設計中的D/A轉換器選用Maxim公司開發的MAX506,電機功率驅動器選用NS公司開發的LMD18245,實現兩個步進電機的功率驅動及電流控制,完成對汽車兩個前照燈的智能轉向。
LMD18245是NS公司生產的DMOS全橋功率放大器,其內部集成了驅動和控制有刷直流電機或單相雙極性步進電機的所有電路模塊。該器件在同一芯片中組合應用了雙極、CMOS控制、保護電路和DMOS功率開關等多種技術,并可通過固定關斷時間技術來控制電機的電流。
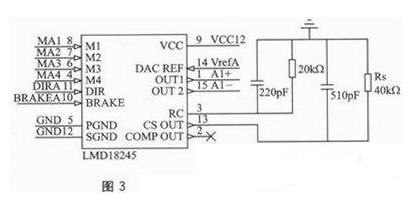
圖3為LMD18245芯片的電路連接圖。一共用了4塊這種芯片組成一個雙步進電機驅動。在圖3中連接RC端的電容和電阻構成了一個單穩態網絡,它的寬度取決于RC端與地之間的RC網絡,關斷時間為1.1RC.當A1+、A1+連接的電機線圈內的電流達到(VrefA×D/16)/[(250×10-6)Rs]安培時,出現斷路。其中D是由M1~M4給定的十進制數。本設計中的VrefA端輸入電壓最大為5 V,接在CS OUT端的電阻Rs為40 kΩ,所以步進電機的最大電流限定為0.5 A,滿足本設計使用的42BYGH4604步進電機的額定電流。電路中DIR是電流方向控制信號,BRAKE是關斷信號,DAC REF、M1、M2、M3和M4是內置4位D/A轉換器的參考電壓和數字輸入信號。
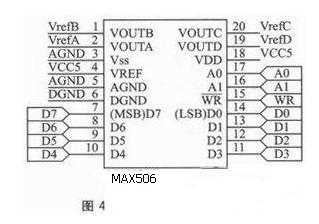
圖4為D/A轉換芯片MAX506的電路連接圖,MAX506是4路8位電壓輸出的數/模轉換器(DAC)。MAX506提供了4路DAC各自獨立的輸入鎖存器,輸入數據從一個共用的8位輸入端口傳輸到輸入鎖存器。MAX506通過地址輸入A0和A1選擇DAC,并通過拉低WR電平信號來更新。電路中的VrefA、VrefB、VrefC、VrefD為4片LMD18245提供DAC REF的參考電壓。
3 軟件設計
本文中MCP2510主要采取中斷模式進行總線數據的接收。整個系統主程序只提供了一種中斷,首先對MCP2510發送復位指令使它復位,然后使其進入Configuration模式進而對它進行初始化,即對各個相應的寄存器賦初始值,設定MCP2510的波特率、發送標識符、接收標識符、報文驗收濾波器及屏蔽寄存器,完成初始化后將其置為Normal模式,進入等待接收數據狀態。
電機驅動模塊電路程序的設計主要有三部分:兩個循環加減計數器、兩個ROM IP核和4路復用D/A轉換器的片選信號發生單元。ROM是用ISE提供的IP核來實現,對24MHz系統時鐘進行分頻得到D/A轉換器的片選信號,然后對4個端口進行掃描,就可以達到分時復用的目的。
汽車前照燈轉向控制中心主要對各汽車傳感器信號進行接收,并根據汽車自適應前照燈的原理實現它的相關控制算法,然后發送控制信號給汽車前照燈轉向控制器,使它控制前照燈實現智能轉向。
根據數據,得到汽車速度與停車視距間的擬合數學關系如下:
S=0.0015V3+0.21V2+0.6821V+10.0122 (1)
當汽車轉彎時,汽車前照燈轉向控制中心根據汽車轉彎半徑和速度計算出前照燈的轉動角度。然后汽車前照燈轉向控制器通過控制步進電機來執行前照燈的轉向。停車視距與轉彎半徑的幾何關系圖如圖5所示。
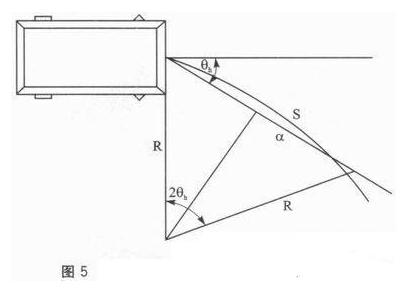
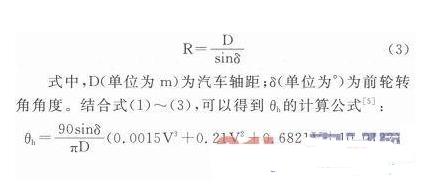
圖5中,R(單位為m)是汽車轉彎半徑;θh(單位為度)是前照燈的水平方向轉動角度;S(單位為m)是停車視距。停車視距的計算公式為:

在實際情況下,轉彎半徑不容易獲取,所以通常通過汽車前輪轉向角度來代替汽車轉彎半徑。根據阿克曼幾何轉向原理,汽車前輪轉角與轉彎半徑的關系如下:
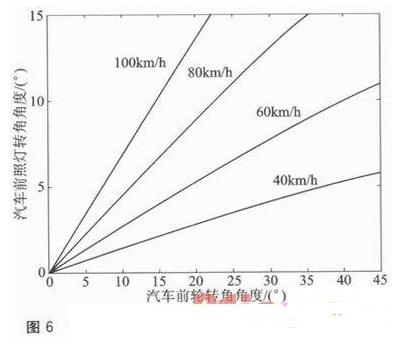
假設汽車的軸距為2.812 m,得到如圖6所示的前照燈轉角角度、前輪轉角角度和汽車速度的關系圖。
4 系統測試
測試中汽車前照燈轉向控制中心通過收集汽車速度和方向盤轉角傳感器信號計算出前照燈轉角角度,然后向汽車前照燈轉向控制器發送控制信號。由于汽車前照燈要求轉動的角度較小,最大轉動角度只有15°,所以很容易達到響應速度的要求。測試表明,前照燈轉角角度誤差較小,滿足系統要求。
5 結語
汽車自適應前照燈系統是汽車安全系統的重要組成部分,它能根據轉向角和車速的變化自動調整前照燈光束照射方向,增加了汽車行駛前方的有效照射區域,從而提高駕駛員在夜間或能見度低的環境下的視覺范圍。測試結果表明本方案滿足要求,已經在項目中獲得了良好的應用效果。
-
FPGA
+關注
關注
1662文章
22476瀏覽量
638376 -
轉換器
+關注
關注
27文章
9438瀏覽量
156754 -
控制器
+關注
關注
114文章
17845瀏覽量
194749 -
CAN總線
+關注
關注
145文章
2050瀏覽量
135426
發布評論請先 登錄

Diodes公司推出高效多相SPI增壓控制器AL8859Q
汽車高壓HB LED控制器MAX25611B:設計與應用全解析
汽車高壓HB LED控制器MAX25611D的技術剖析與應用指南
汽車高壓HB LED控制器MAX25611A:技術解析與設計指南
SRK2001A:LLC諧振轉換器的自適應同步整流控制器
SRK2001:LLC諧振轉換器的自適應同步整流控制器
汽車前照燈的太陽輻射模擬分析與測試

LM10000 自適應電壓縮放(AVS)系統控制器總結

高壓放大器驅動:基于FPGA的SPGD自適應光學控制平臺的探索
CAN總線控制器:智能設備的“交通指揮官”




 工商網監
工商網監
評論