") 華中科技大學(xué):研究面向水陸兩棲人體運(yùn)動(dòng)識(shí)別的柔性多維肌肉形變磁傳感陣列
華中科技大學(xué):研究面向水陸兩棲人體運(yùn)動(dòng)識(shí)別的柔性多維肌肉形變磁傳感陣列

準(zhǔn)確的人體運(yùn)動(dòng)識(shí)別對(duì)于控制可穿戴機(jī)器人及虛擬/增強(qiáng)現(xiàn)實(shí)等人機(jī)交互系統(tǒng)至關(guān)重要,而捕獲人體運(yùn)動(dòng)特征的可穿戴傳感設(shè)備是實(shí)現(xiàn)運(yùn)動(dòng)識(shí)別的基礎(chǔ)(作為運(yùn)動(dòng)識(shí)別算法的輸入)。目前,基于骨骼特征(如關(guān)節(jié)角度和足底力)的識(shí)別方法雖已取得較高精度,但由于這類特征總是滯后于實(shí)際肢體運(yùn)動(dòng),會(huì)造成導(dǎo)致人機(jī)交互響應(yīng)延遲,影響用戶體驗(yàn)。相比之下,作為驅(qū)動(dòng)肢體自主關(guān)節(jié)運(yùn)動(dòng)的唯一動(dòng)力來(lái)源,肌肉的活動(dòng)通常超前于關(guān)節(jié)運(yùn)動(dòng),有利于實(shí)現(xiàn)更快的人機(jī)交互響應(yīng)。此外,人體肌肉數(shù)量遠(yuǎn)多于相應(yīng)關(guān)節(jié),使基于肌肉的傳感方法具有更高的布點(diǎn)靈活性。在肌肉特征方面,機(jī)械信號(hào)(肌肉變形)比生理信號(hào)(如肌電、電阻抗)更加穩(wěn)定,不易受人體汗液或水下環(huán)境影響,更適合作為運(yùn)動(dòng)識(shí)別的傳感方法。然而當(dāng)前的肌肉形變多限于陸地環(huán)境,在水下復(fù)雜環(huán)境的研究報(bào)道甚少。此外,肌肉形變本質(zhì)上是三維的(包括法向與切向形變),而現(xiàn)有設(shè)備大多僅能捕獲一維法向信息,忽略了重要的切向形變信息(在驅(qū)動(dòng)肢體旋轉(zhuǎn)、傾斜等運(yùn)動(dòng)中起關(guān)鍵作用)。因此,開發(fā)能同時(shí)捕獲三維肌肉形變、適用于水陸兩棲環(huán)境的可穿戴傳感設(shè)備,具有重要的研究?jī)r(jià)值與應(yīng)用前景。
文章概述:
近日,華中科技大學(xué)醫(yī)療裝備科學(xué)與工程研究院、機(jī)械科學(xué)與工程學(xué)院的郭家杰教授課題組,研發(fā)出一種可用于水陸兩棲人體運(yùn)動(dòng)識(shí)別的軟磁傳感陣列。博士生劉宇超為論文第一作者,郭家杰教授為通訊作者。
該研究研制了基于疏水硅膠材料的軟磁傳感陣列,通過(guò)捕獲三維肌肉形變分布特征,實(shí)現(xiàn)對(duì)人體水陸兩棲運(yùn)動(dòng)的準(zhǔn)確識(shí)別。傳感節(jié)點(diǎn)與電路均采用柔性結(jié)構(gòu),能夠緊密貼合人體屈曲的肌肉表面,保證信號(hào)采集的穩(wěn)定性。該傳感陣列在水陸環(huán)境中表現(xiàn)出高度一致的測(cè)量性能,并對(duì)水流、水溫和水壓具有強(qiáng)魯棒性。
多通道陣列信號(hào)通過(guò)神經(jīng)網(wǎng)絡(luò)標(biāo)定和插值處理后,可有效提取肌肉形變的三維分布特征。結(jié)合卷積神經(jīng)網(wǎng)絡(luò)算法,僅使用單個(gè)傳感陣列,就能取得步態(tài)分類準(zhǔn)確率98.73%、連續(xù)相位估計(jì)誤差2.85%的優(yōu)秀性能,這優(yōu)于目前常用的慣性測(cè)量單元(82.40和10.39%)和柔性電阻傳感陣列(89.06%和6.33%)。該軟磁傳感陣列還在機(jī)器人手的實(shí)時(shí)控制演示中,展現(xiàn)出其在動(dòng)力假肢控制中的應(yīng)用潛力。本研究有望為機(jī)器人智能控制、康復(fù)進(jìn)程監(jiān)測(cè)及運(yùn)動(dòng)科學(xué)領(lǐng)域的肌肉狀態(tài)感知提供新思路與技術(shù)支撐。
圖文導(dǎo)讀:

圖1.基于軟磁傳感陣列(SMSA)的水陸兩棲人類運(yùn)動(dòng)識(shí)別
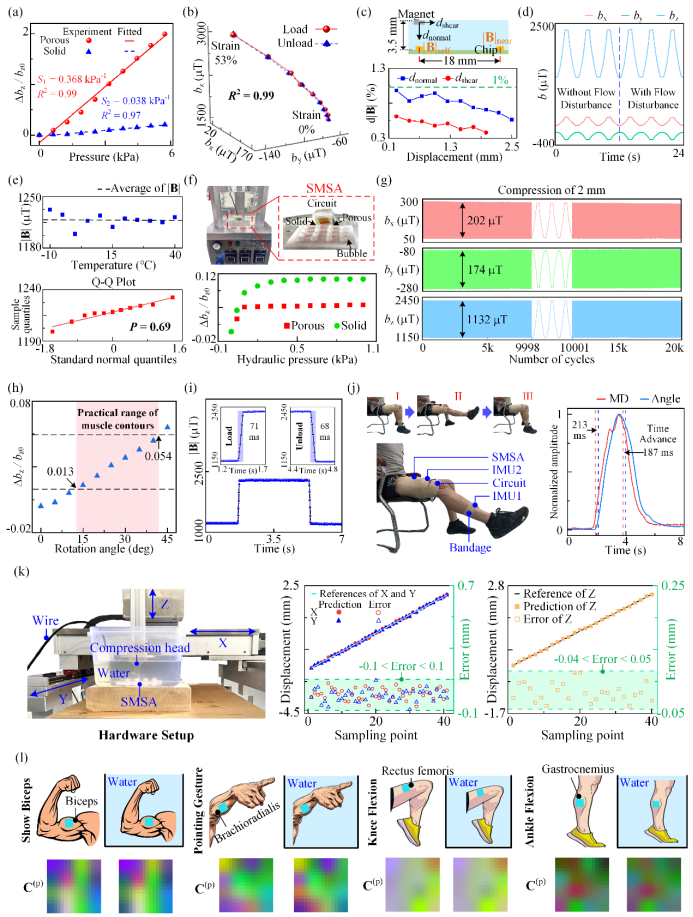
圖2.傳感器性能表征:(a) 靈敏度;(b) 遲滯效應(yīng);(c) 相鄰節(jié)點(diǎn)干擾;(d) 水流干擾;(e) 水溫干擾;(f) 靜水壓力干擾;(g) 循環(huán)壓縮;(h) 彎曲效應(yīng);(i)-(j) 動(dòng)態(tài)響應(yīng)速度;(k) 三維形變標(biāo)定;(l) 水陸兩棲環(huán)境中的測(cè)量一致性
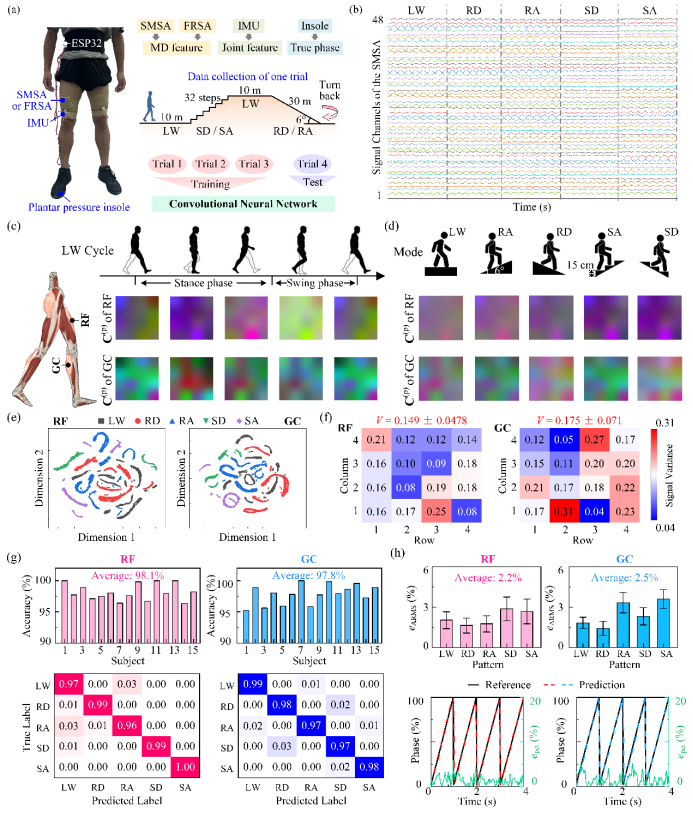
圖3.陸地行走監(jiān)測(cè):(a) 實(shí)驗(yàn)設(shè)置;(b) 肌肉形變?cè)夹盘?hào);(c) 一個(gè)行走周期內(nèi)的肌肉形變?nèi)S分布圖;(d) 五種步態(tài)的肌肉特征;(e) 不同步態(tài)下肌肉信號(hào)的t-SNE可視化;(f) 不同周期之間信號(hào)一致性分析;(g) 行走模式分類;(h) 連續(xù)相位估計(jì)
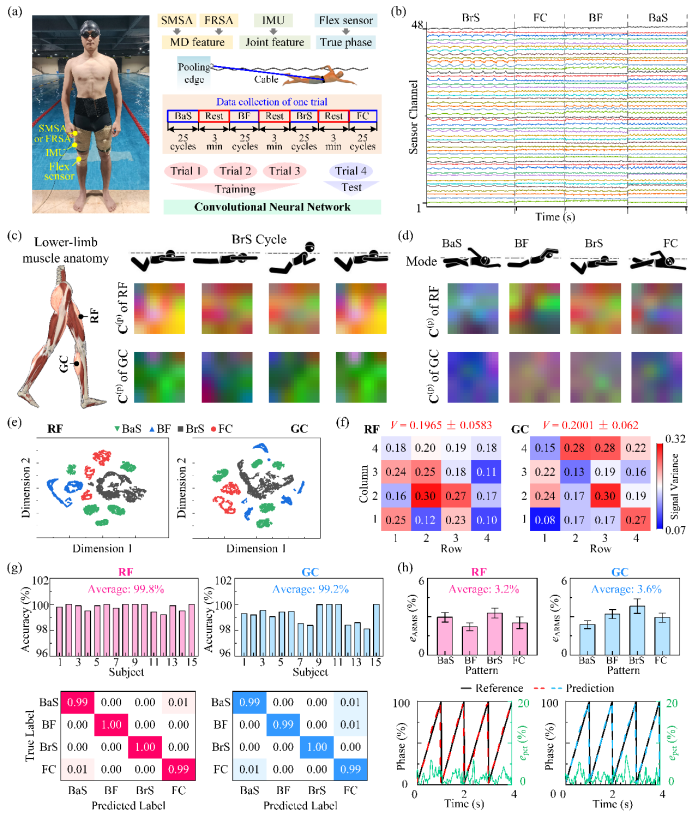
圖4.水下游泳監(jiān)測(cè):(a) 實(shí)驗(yàn)設(shè)置;(b) 肌肉形變?cè)夹盘?hào);(c) 一個(gè)蛙泳周期內(nèi)的肌肉形變?nèi)S分布圖;(d) 四種泳姿的肌肉特征;(e) 四種泳姿下肌肉信號(hào)的t-SNE可視化;(f) 不同周期之間信號(hào)一致性分析;(g) 游泳姿勢(shì)分類;(h) 連續(xù)相位估計(jì)
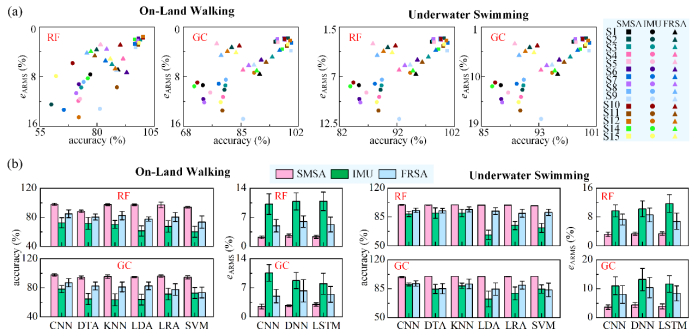
圖5.所提出的軟磁傳感陣列(SMSA)與兩種典型商用傳感器(IMU和FRSA)在水陸兩棲人體運(yùn)動(dòng)識(shí)別中的性能對(duì)比:(a) 全部15名受試者的對(duì)比結(jié)果;(b) 不同模型下的對(duì)比結(jié)果
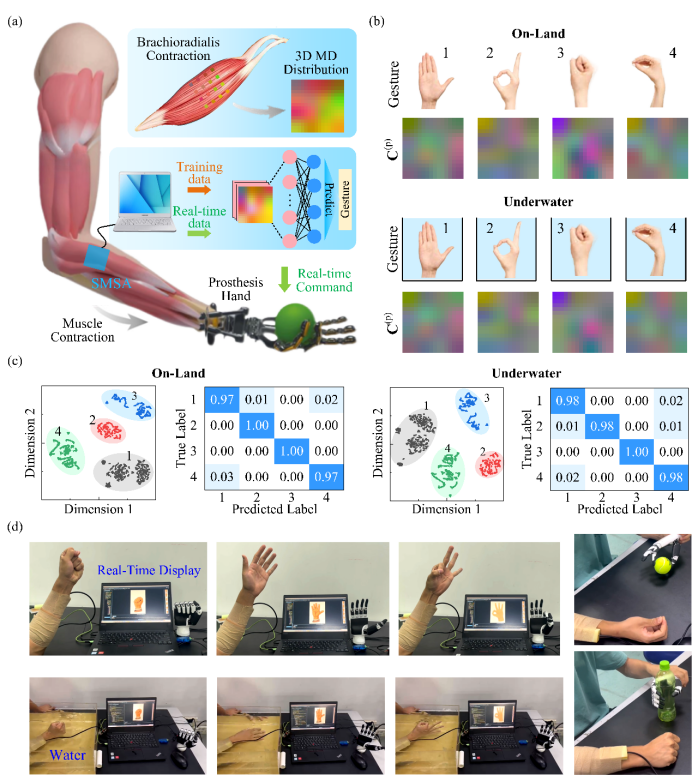
圖6.基于軟磁傳感陣列的水陸兩棲手勢(shì)分類在機(jī)器人手實(shí)時(shí)控制中的應(yīng)用:(a) 機(jī)器人手實(shí)時(shí)控制流程示意圖;(b) 不同手勢(shì)及其對(duì)應(yīng)的肌肉形變特征;(c) 分類結(jié)果的t-SNE分布圖與混淆矩陣;(d) 基于手勢(shì)識(shí)別的機(jī)器人手實(shí)時(shí)控制演示
來(lái)源:https://doi.org/10.1002/aisy.202500315
-
磁傳感器
+關(guān)注
關(guān)注
5文章
271瀏覽量
24675 -
華中科技大學(xué)
+關(guān)注
關(guān)注
0文章
12瀏覽量
3373 -
柔性傳感器
+關(guān)注
關(guān)注
1文章
121瀏覽量
4876
發(fā)布評(píng)論請(qǐng)先 登錄
華中科技大學(xué)集成電路學(xué)院到訪北極芯微參觀交流
“開鴻第一課”走進(jìn)華中科技大學(xué),深開鴻校企合作系列活動(dòng)圓滿舉行

華科大網(wǎng)安學(xué)院開源工坊人才培養(yǎng)新模式的主要成果
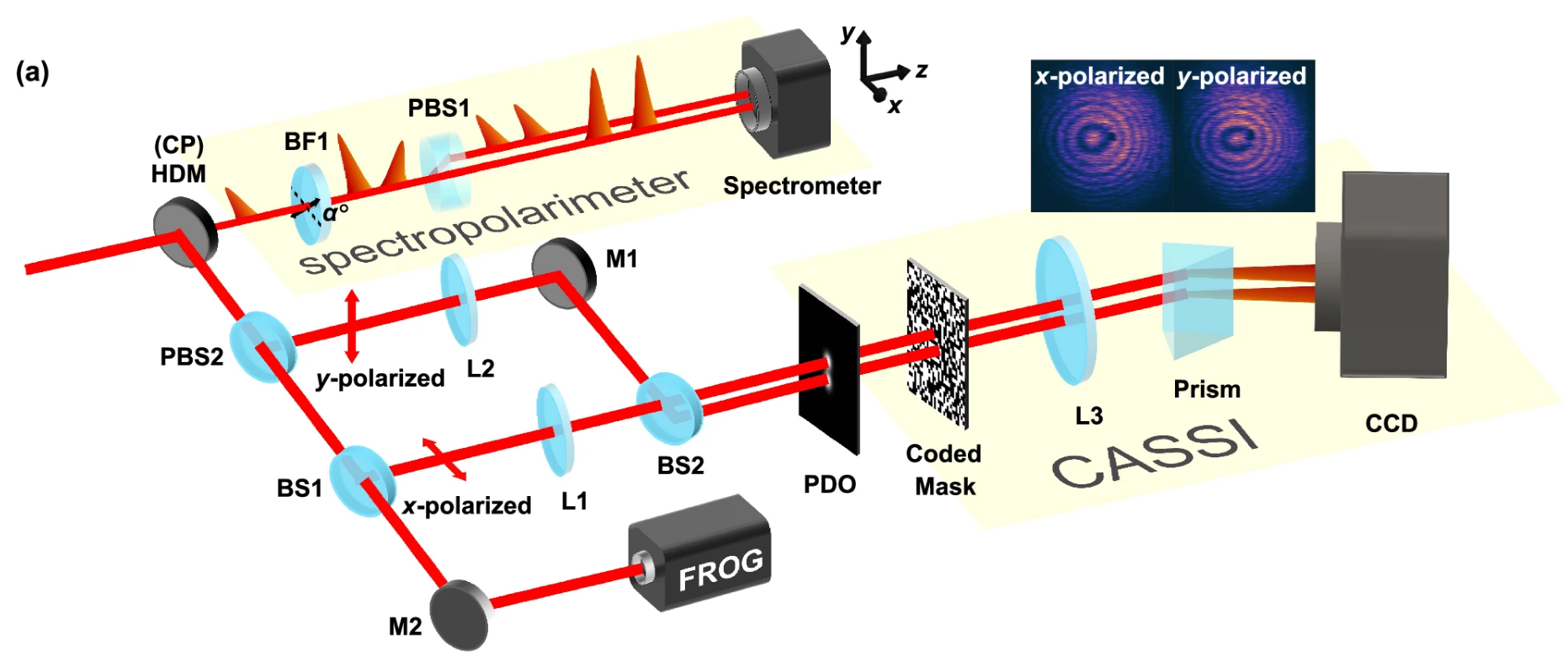
華中科大在超快光場(chǎng)診斷研究取得新進(jìn)展
華科大與光谷攜手發(fā)力傳感器產(chǎn)業(yè),光谷傳感器產(chǎn)業(yè)創(chuàng)新聯(lián)盟揭牌
華中科技大學(xué)與東風(fēng)汽車首批6個(gè)科研項(xiàng)目簽約
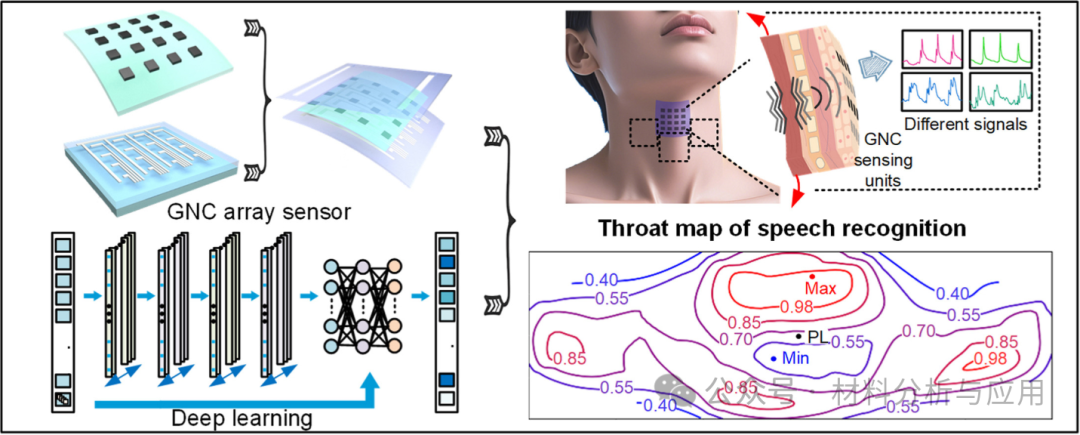
深圳大學(xué):構(gòu)建“喉部地圖”法,柔性超靈敏碳陣列傳感器,用于語(yǔ)音識(shí)別
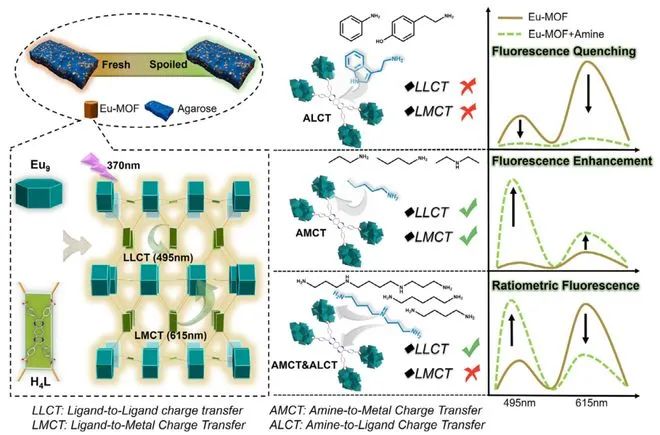
華中科技大學(xué):研發(fā)新型熒光傳感器,實(shí)現(xiàn)肉類腐敗可視化監(jiān)測(cè)
驛路通科技攜手華中科技大學(xué)打造光電子產(chǎn)業(yè)創(chuàng)新高地
全國(guó)首個(gè)985高校開源鴻蒙微專業(yè)落地!深開鴻與華中科技大學(xué)聯(lián)合培養(yǎng)智能信息系統(tǒng)人才

索尼3LCD激光商用投影機(jī)交付華中科技大學(xué)
電子科技大學(xué)OpenHarmony技術(shù)俱樂(lè)部正式揭牌成立

AG600獲頒型號(hào)合格證,廣電計(jì)量護(hù)航“鯤龍”上天入海

廣電計(jì)量助力大型水陸兩棲飛機(jī)AG600取得型號(hào)合格證
華中科技大學(xué)、西南大學(xué):研發(fā)"超聲波超凝膠" 新型植入式傳感器



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論