 實現高穩態精度速度控制的電機控制系統的設計
實現高穩態精度速度控制的電機控制系統的設計

如前所述,將鎖相環技術引人電機的速度控制系統中,能夠實現高穩態精度的速度控制。如圖1所示,鎖相環穩速模塊實現電子鎖相環中鑒相器和低通濾波器的功能,而無刷直流電機、電機控制器、逆變橋和轉子位置檢測裝置共同組成帶有慣性的電壓控制振蕩器。
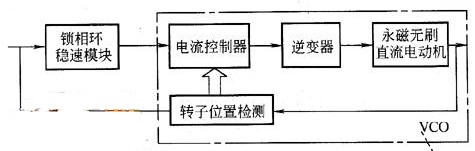
圖1 鎖相環在電機控制中的原理框圖
雖然整個鎖相環穩速控制系統屬于閉環控制系統,但誤差放大器仍可連成跟隨器,鎖相環電路輸出直接與誤差放大器的同相端相連,通過鎖相環自身的調節改變PWM反相端電壓,進而改變PWM占空比,控制轉速。鎖相環TC9242與MC33035接口框圖如圖1所示。
PLL穩速模塊的原理框圖如圖2所示。
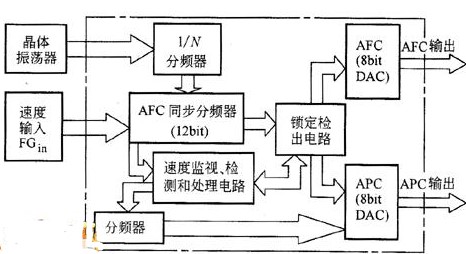
圖2 鎖相環穩速模塊原理圖
PLL穩速模塊由晶體振蕩器和可變系數的分頻器、反饋信號處理電路、F/V變換和P/V變換等幾部分組成。晶體振蕩器(頻率精度以百萬分數記)和可變系數的分頻器提供高精度的頻率基準信號,這是PLL模塊最終實現高精度穩速的前提保證;鎖相環模塊的最大特點是用兩個8bit DAC分別作為F/V和P/V變換。根據PGIN輸人的電機實際轉頻信號,從AFC(自動頻率控制)輸出的是第一個DAC將數字量的頻率差變換為模擬量的信號;從APC(自動相位控制端)輸出的是電機實際轉頻信號和從同步時鐘信號分頻信號比較得到的相位差,經過另一個DAC轉換的輸出電壓信號。使用時,將AFC輸出和APC輸出連接至加法運算放大器,進行信號混合,通過調節控制器的控制電壓輸人Vin,控制電機的功率開關管。當從FGIN來的反饋頻率變化即電機轉速不穩定時,AFC和APC輸出遵循以下規律:
1)FGIN在鎖定范圍以下時,AFC和APC為高電平(1),如圖3所示;
2)FGIN在鎖定范圍以上時,AFC和APC為低電平(0),如圖3所示:
3)FGIN在鎖定范圍之內時,AFC線性輸出,隨著轉速信號FGIN的增大而減小,如圖3所示。
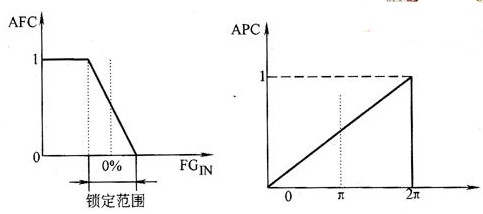
圖3 AFC輸出和APC輸出
APC輸出鋸齒波形,若反饋轉速信號FGIN小于設定頻率信號幾,APC輸出斜率為正的鋸齒波,如圖4 a所示;若反饋轉速信號FGIN大于設定頻率信號fo,APC輸出斜率為負的鋸齒波,如圖4 b所示。
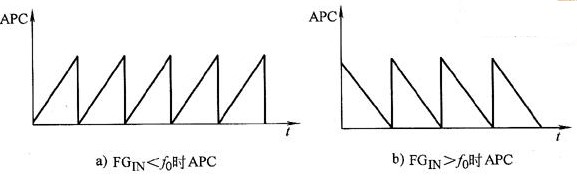
圖4 APC輸出的波形
不同反饋頻率時,相位變換輸出和頻率變換輸出如圖5和圖6所示。
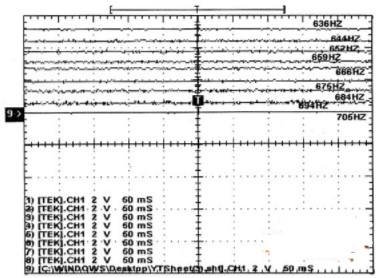
圖5 AFC的輸出
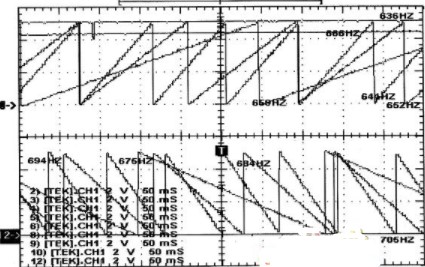
圖6 APC的輸出
其中,鎖定頻率范圍下限為636Hz,上限為705Hz,鎖定頻率為666Hz。
由圖5可以看出,當反饋頻率小于鎖定頻率時,APC輸出三角波形的斜率方向為正;當反饋頻率大于鎖定頻率時,APC輸出三角波形的斜率方向為負;而其轉折點即是鎖定頻率666Hz時的波形,為一直線。
相位變換輸出是一直角三角波,三角波的平均值和最大值不變,頻率為鎖相頻率與反饋頻率之差;對頻率變換輸出,在鎖定范圍內,隨反饋頻率的增加,頻率變換輸出由最大值線性降為零。
由圖6可知,當電機轉速低于設定的穩定轉速時,鎖相環模塊輸出較高電平,經電機驅動控制模塊后,產生PWM信號,經過逆變橋放大后,對電機進行加速;當電機轉速高于設定的穩定轉速時,鎖相環模塊則輸出為低電平,經過控制模塊后,關閉PWM信號,從而使電機減速。通過這種交替加減速,最終使電機穩定在精確的鎖定范圍之內。鎖相環模塊在整個穩速過程中起著極為關鍵的作用,直接決定了系統最終穩態性能的好壞。
-
控制系統
+關注
關注
41文章
6985瀏覽量
114337 -
濾波器
+關注
關注
162文章
8451瀏覽量
186127 -
電機
+關注
關注
144文章
9678瀏覽量
154643
發布評論請先 登錄
用于電機控制系統與設計(4)
步進電機控制系統的設計與實現

步進電機的電細分驅動技術實現控制系統的高精度位移
步進電機控制系統程序如何設計




 工商網監
工商網監
評論