 深入解析RK平臺GPIO驅動:從原理到調試,開發者必看指南
深入解析RK平臺GPIO驅動:從原理到調試,開發者必看指南

GPIO(通用輸入輸出)作為嵌入式系統中最基礎也最常用的硬件接口,是連接芯片與外部設備的“橋梁”。從簡單的LED控制、按鍵檢測,到復雜的傳感器通信,都離不開GPIO的支持。在瑞芯微(RK)平臺上,GPIO驅動的實現直接影響著硬件交互的穩定性與效率。本文將帶你深入剖析RK平臺GPIO驅動的核心邏輯、使用方法,以及對調試工作的關鍵意義。
一、RK平臺GPIO驅動的核心邏輯:從硬件到內核框架
RK平臺的GPIO驅動代碼(如gpio-rockchip.c)本質上是Linux內核與RK芯片GPIO控制器之間的“翻譯官”,它將內核的標準GPIO接口轉化為對硬件寄存器的操作。其核心邏輯可總結為**“硬件適配+框架兼容”**:
1.硬件差異:不同版本GPIO控制器的適配
RK芯片的GPIO控制器存在多個硬件版本(如代碼中的GPIO_TYPE_V1、GPIO_TYPE_V2等),不同版本的寄存器布局和功能存在差異。驅動通過定義不同的寄存器映射表來適配這些差異:
|
// V1版本寄存器布局
static const struct rockchip_gpio_regs gpio_regs_v1 = {
.port_dr = 0x00, //數據寄存器(輸出值)
.port_ddr = 0x04, //方向寄存器(輸入/輸出配置)
.int_en = 0x30, //中斷使能寄存器
// ...其他寄存器
};
// V2版本寄存器布局(地址和功能與V1不同)
static const struct rockchip_gpio_regs gpio_regs_v2 = {
.port_dr = 0x00,
.port_ddr = 0x08, //方向寄存器地址與V1不同
.int_en = 0x10, //中斷使能寄存器地址與V1不同
.int_bothedge = 0x30,// V2新增:雙邊沿觸發寄存器
// ...其他寄存器
};
|
驅動初始化時會通過讀取version_id寄存器(如gpio_regs_v2.version_id = 0x78)自動識別硬件版本,選擇對應的寄存器映射表,確保操作的準確性。
2.內核框架兼容:對接Linux gpiolib
為了讓上層應用和其他內核模塊通過統一的接口使用GPIO,RK驅動嚴格遵循Linux內核的gpiolib框架,實現了標準的GPIO操作函數:
?方向控制:rockchip_gpio_set_direction通過操作port_ddr寄存器設置GPIO為輸入或輸出;
?電平讀寫:rockchip_gpio_set(寫輸出電平)和rockchip_gpio_get(讀輸入電平)操作port_dr和ext_port寄存器;
?中斷管理:rockchip_irq_set_type配置中斷觸發方式(邊沿/電平),rockchip_irq_demux負責中斷分發;
?去抖配置:rockchip_gpio_set_debounce通過debounce寄存器和時鐘分頻實現按鍵去抖。
這些函數被封裝為gpio_chip結構體,注冊到內核后,上層即可通過gpiod_get、gpiod_set_value等標準接口操作GPIO,無需關心底層硬件細節。
二、RK GPIO的使用方法:開發者如何快速上手
基于RK驅動的GPIO使用遵循Linux內核的標準GPIO接口,開發者無需直接操作硬件寄存器,只需調用以下核心接口即可:
1.基礎輸入輸出操作
?申請GPIO:通過gpiod_get獲取GPIO句柄,指定引腳編號和方向(如輸入GPIOD_IN、輸出GPIOD_OUT_LOW);
?設置輸出電平:使用gpiod_set_value設置高/低電平(1/0);
?讀取輸入電平:通過gpiod_get_value獲取當前電平;
?釋放GPIO:使用gpiod_put釋放句柄,避免資源泄露。
示例代碼(內核模塊中):
|
struct gpio_desc *gpio;
//申請GPIO(假設使用GPIO4_5,輸出模式,初始低電平)
gpio = gpiod_get(dev, "led", GPIOD_OUT_LOW);
if (IS_ERR(gpio)) {
dev_err(dev, "Failed to get GPIOn");
return PTR_ERR(gpio);
}
//設置高電平(點亮LED)
gpiod_set_value(gpio, 1);
//釋放GPIO
gpiod_put(gpio);
|
2.中斷功能使用
若需要通過GPIO中斷檢測外部事件(如按鍵按下),步驟如下:
1.通過gpiod_to_irq將GPIO轉換為中斷號;
2.使用request_irq注冊中斷處理函數;
3.配置中斷觸發方式(邊沿/電平,通過設備樹或irq_set_irq_type設置)。
示例代碼:
|
int irq;
//獲取中斷號
irq = gpiod_to_irq(gpio);
if (irq < 0) {
dev_err(dev, "Failed to get IRQn");
return irq;
}
//注冊中斷處理函數(上升沿觸發)
ret = request_irq(irq, button_irq_handler, IRQF_TRIGGER_RISING, "button", dev);
if (ret) {
dev_err(dev, "Failed to request IRQn");
return ret;
}
|
3.設備樹配置
在設備樹中,需要指定GPIO所屬的控制器、引腳編號及功能(如復用為GPIO而非其他外設)。例如:
|
led {
compatible = "gpio-leds";
led0 {
gpios = <&gpio4 5 GPIO_ACTIVE_HIGH>; //使用GPIO4組的第5個引腳,高電平有效
label = "rkled";
};
};
|
三、對調試者的意義:從驅動代碼到硬件問題定位
對于調試者而言,理解RK GPIO驅動的實現細節是解決硬件交互問題的關鍵。以下場景中,驅動代碼的知識能直接加速問題定位:
1.寄存器級調試:繞過軟件直接驗證硬件
當懷疑軟件邏輯有誤時,可通過讀寫寄存器直接驗證GPIO硬件是否正常。例如:
?若GPIO輸出異常,可通過devmem命令直接寫port_dr寄存器(如V2版本的0x00和0x04地址),觀察硬件是否響應;
?若輸入電平讀取錯誤,可讀取ext_port寄存器(如V2版本的0x70),確認硬件輸入是否正確。
驅動中rockchip_gpio_writel和rockchip_gpio_readl函數明確了不同版本寄存器的操作方式,調試時需根據硬件版本選擇正確的地址。
2.中斷問題排查:從驅動邏輯到硬件信號
中斷不觸發或誤觸發是常見問題,結合驅動代碼可從以下角度排查:
?中斷掩碼:驅動中int_mask寄存器(如V2的0x18)控制中斷屏蔽,若中斷不響應,可檢查該寄存器是否被意外屏蔽;
?觸發方式:rockchip_irq_set_type函數中,邊沿觸發需配置int_type和int_polarity,雙邊沿觸發需設置int_bothedge(V2特有),若觸發方式錯誤,可通過修改寄存器驗證;
?中斷狀態:int_status寄存器(如V2的0x50)記錄未處理的中斷,若中斷丟失,可檢查該寄存器是否有殘留狀態。
3.去抖功能失效:時鐘與寄存器配置檢查
按鍵抖動導致的誤觸發可通過驅動的去抖功能解決,若去抖失效,可結合rockchip_gpio_set_debounce函數排查:
?V2版本通過dbclk_div_con配置分頻系數,dbclk_div_en使能去抖,需確認時鐘(db_clk)是否使能、分頻是否正確;
?若去抖時間不符合預期,可根據代碼中div = debounce * freq公式計算分頻值,驗證寄存器配置是否與預期一致。
4.版本兼容性問題:區分V1/V2硬件差異
不同版本GPIO控制器的寄存器操作差異可能導致功能異常。例如:
?V2版本的port_dr寄存器分為兩個16位寄存器(0x00和0x04),驅動通過gpio_writel_v2組合讀寫,若誤按V1方式操作,會導致高16位引腳控制失效;
?V1版本無int_bothedge寄存器,雙邊沿觸發需通過軟件模擬(驅動中toggle_edge_mode標記),若在V1硬件上使用雙邊沿觸發,需確認軟件邏輯是否正確。
四、總結:驅動是連接軟件與硬件的“橋梁”
RK平臺的GPIO驅動不僅實現了硬件功能的封裝,更通過對接Linux標準框架簡化了上層開發。對于開發者,掌握標準接口即可快速實現硬件交互;對于調試者,理解驅動的寄存器操作、中斷邏輯和版本差異,能直接定位從軟件到硬件的各類問題。
無論是LED閃爍、按鍵檢測還是復雜的中斷響應,GPIO驅動都是底層交互的核心。深入理解其原理,不僅能提高開發效率,更能在遇到疑難問題時快速突破——畢竟,能看透“橋梁”結構的人,才能更好地駕馭它連接的兩岸。
希望本文能為RK平臺的開發者和調試者提供實用的參考,讓GPIO這一“基礎接口”發揮更大的價值。
-
嵌入式系統
+關注
關注
41文章
3808瀏覽量
133816 -
瑞芯微
+關注
關注
27文章
821瀏覽量
54617 -
GPIO
+關注
關注
16文章
1332瀏覽量
56400
發布評論請先 登錄
絕對干貨!HarmonyOS開發者日資料全公開,鴻蒙開發者都在看
HDC 2022 開發者主題演講與技術分論壇干貨分享(附課件)
喜報|HarmonyOS開發者社區連獲業內獎項,持續深耕開發者生態
2021 OPPO開發者大會:小布開發者平臺生態

Banana Pi BPI-W3 RK3588平臺驅動調試篇 [ PCIE篇二 ] - PCIE的開發指南
![Banana Pi BPI-W3 <b class='flag-5'>RK</b>3588<b class='flag-5'>平臺</b><b class='flag-5'>驅動</b><b class='flag-5'>調試</b>篇 [ PCIE篇二 ] - PCIE的<b class='flag-5'>開發指南</b>](https://file1.elecfans.com//web2/M00/AB/FB/wKgaomVC-i-AZQiOAAJH8vK8vCE230.jpg)
迅為RK3568開發板驅動指南GPIO子系統GPIO子系統API函數的引入
RK3568驅動指南|第十二篇 GPIO子系統-第130章 GPIO的調試方法

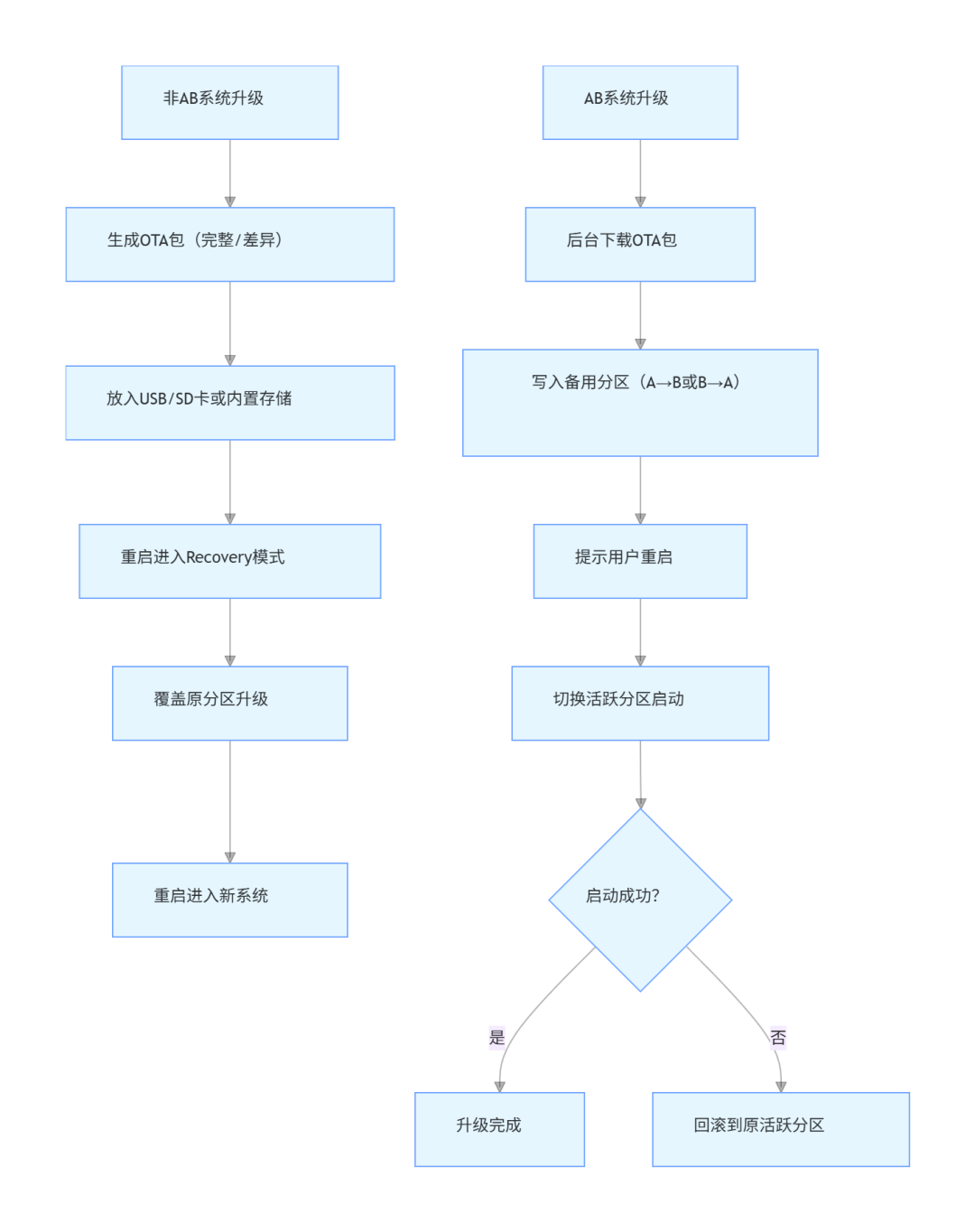
一文吃透RK平臺OTA升級開發:從邏輯到調試的完整指南
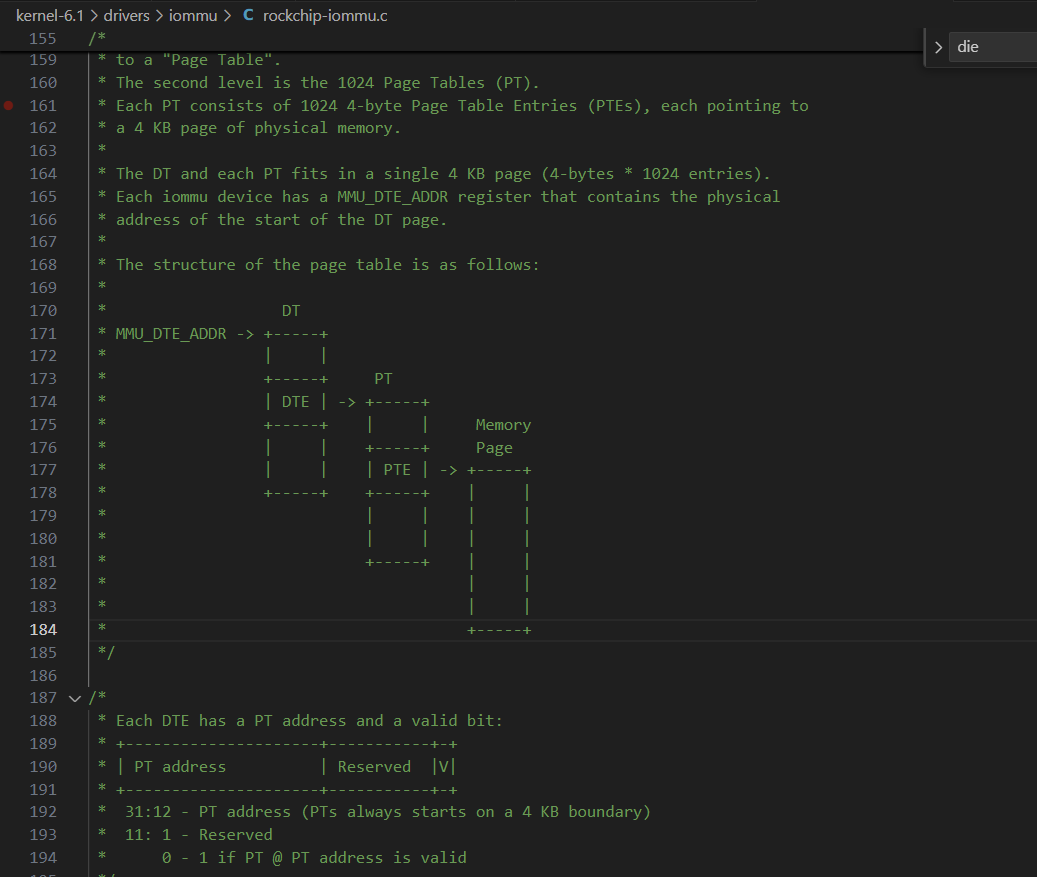
RK平臺Linux IOMMU開發:從原理到實戰
RK開發者大會照片墻全解析:70?家方案商生態圖譜

深入解析U-Boot image.c:RK平臺鏡像處理核心邏輯




 工商網監
工商網監
評論