 RK3588攝像頭配置:搞懂CPhy與DPhy的區別,再也不踩坑!
RK3588攝像頭配置:搞懂CPhy與DPhy的區別,再也不踩坑!

在嵌入式視覺開發中,MIPI Phy(物理層)是攝像頭與處理器之間的“數據高速公路”——它直接決定了攝像頭的分辨率、幀率上限,以及硬件連接的穩定性。作為Rockchip旗艦級平臺的RK3588,同時支持CPhy和DPhy兩種主流MIPI Phy標準,適配從入門到高端的各類攝像頭需求。
很多開發者在配置RK3588攝像頭時,常會困惑:CPhy和DPhy到底有啥不一樣?該選哪種?兩者的設備樹配置又有哪些關鍵差異?今天我們就從原理、場景、實戰配置三個維度,一次性講透這個問題。
一、先搞懂基礎:CPhy與DPhy的核心原理差異
CPhy(MIPI C-PHY)和DPhy(MIPI D-PHY)都是MIPI聯盟定義的物理層協議,核心目標是實現高速圖像數據傳輸,但在信號編碼、帶寬效率、硬件設計上有本質區別,這些差異直接決定了它們的適用場景。
我們用一張表清晰對比核心差異:
|
對比維度
|
DPhy(差分物理層)
|
CPhy(緊湊型物理層)
|
|
信號傳輸方式
|
采用“差分對”傳輸(每lane是2根線:正/負),通過“0/1”電平變化傳遞信號,兼容傳統邏輯。
|
采用“三相符號編碼”(每組3根線),通過3種電平狀態的切換傳遞信號,是更高效的編碼方式。
|
|
帶寬效率
|
單lane帶寬上限:D-PHY 1.3版本達5Gbps/lane,需通過“多lane疊加”提升總帶寬(如4 lane達20Gbps)。
|
單lane帶寬上限:C-PHY 1.2版本達6.4Gbps/lane,且帶寬密度更高(3根線實現比DPhy 2根線更高的帶寬)。
|
|
引腳數量
|
每lane需2根線(差分對),加上時鐘lane(另1對),總引腳數較多(如4 lane需10根線:4*2+2)。
|
每“組”僅需3根線(無單獨時鐘lane,時鐘嵌入數據中),相同帶寬下引腳數更少(如同等20Gbps帶寬,CPhy僅需6根線:2組* 3)。
|
|
功耗與EMI
|
差分信號抗干擾性強,但高帶寬下功耗較高;單獨時鐘lane易產生電磁干擾(EMI)。
|
三相編碼無單獨時鐘,EMI更低;相同帶寬下,因引腳少、編碼效率高,功耗比DPhy低10%-20%。
|
|
兼容性
|
協議成熟(2008年發布),支持從低帶寬(100Mbps)到高帶寬(20Gbps),適配絕大多數攝像頭芯片。
|
2016年發布,主打高帶寬場景,兼容性相對局限(僅中高端傳感器支持),但技術迭代更快。
|
簡單理解:DPhy像“傳統雙向車道”,靠增加車道數(lane)提升運力,穩定但占用空間;CPhy像“智能三車道”,靠更高效的通行規則(三相編碼)提升運力,省空間、低功耗,適合“高速重載”場景。
二、場景決定選擇:CPhy與DPhy的典型應用
選擇CPhy還是DPhy,核心看攝像頭的分辨率、幀率需求,以及硬件設計的約束(如PCB空間、功耗)。
1. DPhy:成熟穩定,覆蓋中低高端主流場景
DPhy因協議成熟、兼容性廣,是目前嵌入式視覺的“主力軍”,尤其適合以下場景:
?中低像素攝像頭:如200萬~800萬像素的安防攝像頭、車載環視攝像頭(分辨率1080P~4K,幀率30fps),單lane或2 lane即可滿足帶寬需求;
?中端高像素攝像頭:如1200萬~4800萬像素的手機副攝、工業檢測攝像頭(4K@30fps),4 lane DPhy(20Gbps帶寬)完全夠用;
?對兼容性要求高的場景:如需要適配不同品牌、不同型號傳感器的方案,DPhy的廣泛支持能減少適配成本。
2. CPhy:高帶寬剛需,聚焦高端影像
CPhy的優勢在“高帶寬、低功耗、省引腳”,因此主要面向高端高規格攝像頭:
?超高像素主攝:如1億像素以上的手機主攝(如小米12 Ultra的IMX989)、專業相機,需高帶寬支撐大尺寸圖像數據傳輸;
?高幀率視頻錄制:如4K@60fps、8K@30fps的攝像頭(如運動相機、車載ADAS前視攝像頭),高幀率意味著單位時間內數據量翻倍,需CPhy的高帶寬支撐;
?空間受限的硬件設計:如小型化設備(無人機、穿戴設備),PCB面積有限,CPhy的少引腳優勢能簡化布局。
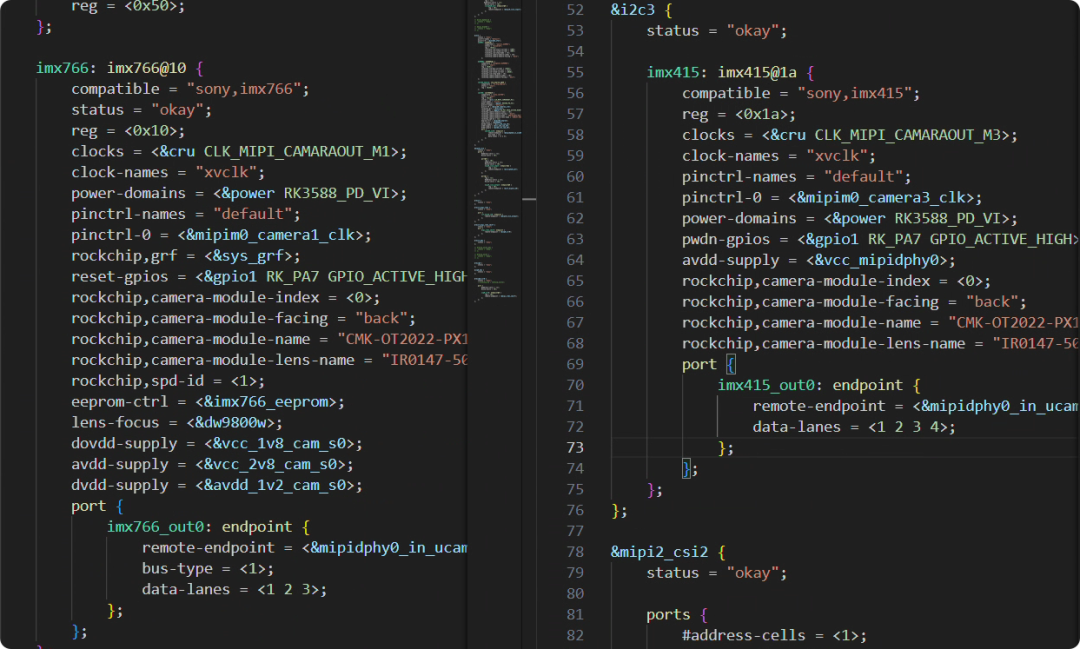
三、RK3588實戰:CPhy與DPhy攝像頭配置差異
結合你提供的兩份RK3588設備樹代碼(CPhy適配IMX766,DPhy適配IMX415),我們從核心節點、電源引腳、數據鏈路三個維度,拆解配置差異的關鍵要點。
1.核心差異:Phy節點與硬件使能
Phy節點是配置的“入口”,RK3588對CPhy和DPhy的節點定義完全不同,且硬件使能邏輯有區別。
|
配置項
|
CPhy(適配IMX766)
|
DPhy(適配IMX415)
|
關鍵說明
|
|
Phy主節點
|
&csi2_dcphy0(CPhy在RK3588中常標注為DCPhy)
|
&csi2_dphy0
|
節點名稱直接區分Phy類型,需確保與硬件對應(RK3588有多個Phy實例,不可混用)。
|
|
Phy硬件節點使能
|
注釋&csi2_dphy0_hw { status = "okay"; };
|
啟用&csi2_dphy0_hw { status = "okay"; };
|
DPhy需顯式啟用硬件節點(_hw后綴),CPhy則無需單獨啟用,這是RK平臺的特有邏輯。
|
|
數據通道(lane)
|
data-lanes = <1 2 3>(3 lane)
|
data-lanes = <1 2 3 4>(4 lane)
|
因CPhy單lane帶寬更高,3 lane即可滿足IMX766需求;DPhy需4 lane匹配IMX415的帶寬。
|
代碼片段對比(CPhy vs DPhy):
|
2.電源與引腳:DPhy需專用穩壓器,引腳綁定不同
RK3588的DPhy對電源穩定性要求更高,需單獨配置“Phy專用穩壓器”;而CPhy可復用其他電源,且兩者的時鐘引腳、電源引腳綁定也不同。
|
配置項
|
CPhy(IMX766)
|
DPhy(IMX415)
|
關鍵說明
|
|
Phy專用穩壓器
|
注釋vcc_mipidphy0節點(未啟用)
|
啟用vcc_mipidphy0(固定穩壓器)
|
DPhy需單獨供電(GPIO1_PB2控制使能),確保高速信號穩定;CPhy可復用攝像頭電源。
|
|
引腳配置(pinctrl)
|
pinctrl-0 = <&mipim0_camera1_clk>
|
pinctrl-0 = <&mipim0_camera3_clk>
|
時鐘引腳綁定不同(對應RK3588的不同攝像頭時鐘輸出通道),需與硬件焊接匹配。
|
|
攝像頭控制GPIO
|
reset-gpios = <&gpio1 RK_PA7>(復位引腳)
|
pwdn-gpios = <&gpio1 RK_PA7>(掉電引腳)
|
控制引腳功能不同(復位vs掉電),需根據傳感器datasheet調整。
|
代碼片段對比(電源與引腳):
|
3.數據鏈路:CSI控制器與CIF節點需“一一對應”
RK3588的攝像頭數據傳輸鏈路是“傳感器→Phy→CSI控制器→CIF(攝像頭接口前端)→ISP”,CPhy和DPhy需匹配不同的CSI控制器和CIF節點實例。
|
數據鏈路節點
|
CPhy(IMX766)
|
DPhy(IMX415)
|
關鍵說明
|
|
CSI控制器
|
&mipi0_csi2(MIPI CSI-2控制器0)
|
&mipi2_csi2(MIPI CSI-2控制器2)
|
RK3588有多個CSI控制器,需與Phy實例綁定(CPhy對應mipi0,DPhy對應mipi2)。
|
|
CIF節點
|
&rkcif_mipi_lvds(CIF LVDS接口0)
|
&rkcif_mipi_lvds2(CIF LVDS接口2)
|
CIF是Phy與ISP的橋梁,需與CSI控制器對應(mipi0→lvds0,mipi2→lvds2)。
|
|
I2C總線
|
&i2c4(I2C總線4)
|
&i2c3(I2C總線3)
|
傳感器的I2C通信總線不同,需與硬件上傳感器的I2C引腳連接匹配。
|
核心邏輯:RK3588的硬件設計中,Phy、CSI控制器、CIF節點是“綁定分組”的,配置時需確保鏈路全程對應(如DPhy→mipi2_csi2→rkcif_mipi_lvds2),錯配會導致數據傳輸中斷。
四、總結:RK3588攝像頭配置的3個關鍵結論
1.選Phy先看需求:
?若攝像頭是800萬~4800萬像素、幀率≤30fps(如安防、環視),優先選DPhy(成熟、兼容好、配置簡單);
?若攝像頭是1億像素以上或幀率≥60fps(如高端主攝、ADAS前視),必選CPhy(高帶寬、低功耗)。
1.配置關鍵檢查點:
?Phy節點與硬件使能:CPhy用csi2_dcphy0,DPhy用csi2_dphy0+csi2_dphy0_hw;
?數據鏈路匹配:Phy→CSI控制器→CIF節點需一一對應(如CPhy→mipi0→lvds0,DPhy→mipi2→lvds2),鏈路是可選的,具體可根據開發手冊去配;
?電源與引腳:DPhy需啟用vcc_mipidphy0,時鐘引腳、I2C總線需與硬件焊接一致。
1.調試避坑技巧:
?若攝像頭無數據,先檢查Phy和CSI控制器的status是否為“okay”;
?若圖像卡頓/花屏,檢查data-lanes數量是否與傳感器匹配,電源電壓是否穩定;
?若I2C通信失敗,確認reg(傳感器地址)和I2C總線是否與硬件一致。
掌握CPhy與DPhy的差異,不僅能快速搞定RK3588的攝像頭配置,更能在方案選型階段就選對“數據高速公路”,避免后期硬件改版或性能瓶頸。你在RK3588攝像頭開發中遇到過哪些問題?歡迎在評論區交流!
-
處理器
+關注
關注
68文章
20300瀏覽量
253742 -
嵌入式
+關注
關注
5204文章
20560瀏覽量
335904 -
攝像頭
+關注
關注
61文章
5103瀏覽量
103351
發布評論請先 登錄
基于RK3588J的6路MIPI CSI視頻采集案例分享,多路視頻系統必看!
迅為RK3588開發板實時系統編譯-Preemption系統/ Xenomai系統編譯-選擇攝像頭配置
瑞芯微技術信息簡報之rk3588 PK rk3588s
基于RK3588芯片打造360度8K全景攝像機的產品解決方案
RK3588芯片支持8K視頻的硬編解碼

rk3588和rk3588s的區別
RK3588與3588s的區別

ArmSoM RK3588/RK3576核心板,Rockchip攝像頭使用

快速上手RK3588:攝像頭調試




 工商網監
工商網監
評論