 Rockchip CIF驅動深度解析:從架構設計到電源計數補丁修復
Rockchip CIF驅動深度解析:從架構設計到電源計數補丁修復

在嵌入式Linux系統中,Rockchip CIF(Camera Interface)驅動是攝像頭硬件與上層應用的“橋梁”——它不僅要實現設備初始化、格式協商、數據捕獲等核心功能,還需保障運行穩定性。本文將從「驅動整體架構」入手,拆解核心文件功能與調用關系,再聚焦「Sensor電源引用計數補丁」,詳解如何通過補丁解決實際運行中的穩定性問題,為驅動開發與調試提供完整參考。
一、CIF驅動整體架構:核心文件與功能拆解
Rockchip CIF驅動位于drivers/media/platform/rockchip/cif/目錄下,包含5個核心文件(dev.c/subdev-itf.c/subdev-itf.h/procfs.c/capture.c),各文件分工明確、協同工作,共同支撐攝像頭的完整功能。
1.核心文件功能總覽
先通過一張腦圖快速梳理各文件的核心定位:
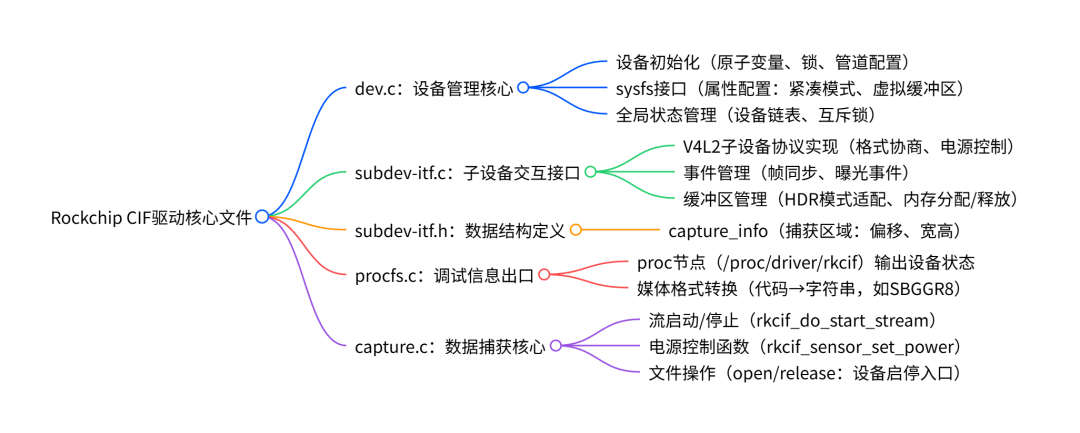
2.關鍵文件深度解析
(1)dev.c:設備管理“總控”
作為驅動的“大腦”,dev.c負責初始化設備基礎環境、管理全局狀態,并提供用戶可配置的屬性接口。
?核心工作:
a.設備初始化:在rkcif_plat_init中初始化原子變量(如power_cnt、streamoff_cnt)、互斥鎖(stream_lock)、媒體管道(pipe),為設備運行打下基礎。
b.sysfs屬性配置:實現compact_test(緊湊數據流模式)、is_use_dummybuf(虛擬緩沖區開關)等屬性的讀寫函數,用戶可通過/sys/class/video4linux/videoX/路徑動態調整設備行為。
c.全局狀態維護:通過rkcif_device_list鏈表管理所有CIF設備,rkcif_dev_mutex保證多設備操作的互斥性,避免并發沖突。
?關鍵代碼示例(設備初始化):
// drivers/media/platform/rockchip/cif/dev.cintrkcif_plat_init(structrkcif_device *cif_dev,structdevice_node *node,intirq){// 初始化原子變量(電源、流關閉、傳感器狀態)atomic_set(&cif_dev->power_cnt,0);atomic_set(&cif_dev->streamoff_cnt,0);atomic_set(&cif_dev->sensor_off,1);// 后續補丁新增:Sensor電源引用計數初始化atomic_set(&cif_dev->sd_power_cnt,0);// 初始化媒體管道(open/close回調)cif_dev->pipe.open = rkcif_pipeline_open;cif_dev->pipe.close = rkcif_pipeline_close;return0;}
(2)subdev-itf.c:傳感器“交互橋梁”
subdev-itf.c是CIF驅動與攝像頭Sensor的直接交互接口,實現V4L2子設備協議,負責格式協商、電源控制、事件觸發。
?核心工作:
a.格式協商:通過sditf_get_set_fmt與Sensor協商輸入格式(分辨率、像素格式如SBGGR8),并配置CIF內部數據流參數。
b.電源控制:sditf_s_power函數觸發Sensor電源開關,是后續補丁重點修復的調用路徑之一。
c.事件管理:訂閱/觸發V4L2_EVENT_FRAME_SYNC(幀同步)、V4L2_EVENT_EXPOSURE(曝光)事件,確保數據捕獲時序正確。
?關鍵代碼示例(電源控制接口):
// drivers/media/platform/rockchip/cif/subdev-itf.cstaticintsditf_s_power(structv4l2_subdev *sd,inton){structsditf_priv *priv = v4l2_subdev_to_sditf(sd);structrkcif_device *cif_dev = priv->cif_dev;intret =0;mutex_lock(&cif_dev->stream_lock);if(on) {pm_runtime_get_sync(cif_dev->dev);// 后續補丁新增:調用統一電源管理函數ret |= rkcif_sensor_set_power(&cif_dev->stream[0],on);}else{pm_runtime_put_sync(cif_dev->dev);ret |= rkcif_sensor_set_power(&cif_dev->stream[0],on);}mutex_unlock(&cif_dev->stream_lock);returnret;}
(3)capture.c:數據捕獲“執行核心”
capture.c負責攝像頭數據的實際捕獲,包括流啟動/停止、緩沖區處理、電源控制函數實現,是本次補丁修改的核心文件。
?核心工作:
a.流管理:rkcif_do_start_stream啟動數據捕獲,rkcif_stream_init初始化流狀態(如幀丟失計數frame_loss)。
b.電源控制函數:rkcif_sensor_set_power是Sensor電源開關的實際實現,補丁通過修改該函數引入引用計數邏輯。
c.文件操作:rkcif_fh_open/rkcif_fh_release處理用戶空間的設備打開/關閉請求,控制電源開關的調用時機。
(4)procfs.c:調試信息“出口”
procfs.c通過/proc/driver/rkcif節點向用戶空間暴露驅動運行狀態,便于調試定位問題。
?核心工作:
a.格式轉換:rkcif_pixelcode_to_string將媒體總線格式代碼(如MEDIA_BUS_FMT_SBGGR8_1X8)轉換為可讀字符串("SBGGR8")。
b.信息輸出:rkcif_show_clks輸出時鐘頻率、rkcif_show_format輸出當前捕獲格式,幫助開發者確認設備配置是否正確。
(5)subdev-itf.h:數據結構“定義層”
僅定義struct capture_info結構體,存儲攝像頭捕獲區域的偏移(offset_x/y)和分辨率(width/height),是格式協商、緩沖區分配的基礎數據載體。
二、驅動模塊協同:調用關系與架構流程圖
各文件并非獨立運行,而是通過“初始化→配置→捕獲→調試”的流程協同工作,以下是核心調用關系與架構圖:
1.核心調用流程(以“設備啟動”為例)
1.初始化:dev.c的rkcif_plat_init初始化設備狀態→subdev-itf.c的sditf_init_buf分配緩沖區→capture.c的rkcif_stream_init初始化流。
2.用戶交互:用戶通過open調用觸發capture.c的rkcif_fh_open→加鎖后調用rkcif_sensor_set_power上電→subdev-itf.c的sditf_s_power與Sensor交互。
3.數據捕獲:rkcif_do_start_stream啟動流→subdev-itf.c的事件機制同步幀數據→數據寫入緩沖區。
4.調試監控:用戶讀取/proc/driver/rkcif→procfs.c的函數從dev.c獲取設備狀態并輸出。
2.架構流程圖

三、補丁修復:Sensor電源引用計數問題拆解
在理解驅動架構后,我們聚焦本次關鍵補丁——修復Sensor電源引用計數問題。該補丁針對Kernel 6.1版本,解決了驅動運行中“過早斷電”“重復上電”等穩定性隱患。
1.補丁背景:原驅動的3大問題
原CIF驅動對Sensor電源的管理缺乏“引用計數”機制,導致多場景下異常:
?問題1:無計數跟蹤:多個模塊(如預覽+錄像)同時使用Sensor時,無法記錄“當前使用者數量”,一個模塊調用斷電后,其他模塊會因Sensor斷電崩潰。
?問題2:調用時機混亂:rkcif_sensor_set_power在open/release中調用時機錯誤(如解鎖后調用),并發場景下計數錯亂。
?問題3:路徑覆蓋不全:subdev-itf.c的sditf_s_power未經過統一電源函數,繞過計數邏輯,導致部分場景電源失控。
2.修復思路:引入“原子引用計數”
補丁核心是通過原子變量sd_power_cnt(定義在dev.c,聲明在dev.h)跟蹤電源使用狀態,規則如下:
?上電(on=1):僅當sd_power_cnt從0→1時,才執行Sensor上電(避免重復上電)。
?斷電(on=0):僅當sd_power_cnt從1→0時,才執行Sensor斷電(避免過早斷電)。
?全路徑覆蓋:所有電源操作(open/release、sditf_s_power)均調用rkcif_sensor_set_power,確保計數不遺漏。
3.補丁對各文件的修改(附路徑)
(1)capture.c:核心邏輯修改(路徑:
drivers/media/platform/rockchip/cif/capture.c)
?修改1:rkcif_sensor_set_power函數重構
從靜態函數改為全局函數,新增計數邏輯:
// 原函數:直接操作電源,無計數staticintrkcif_sensor_set_power(...){ ... }// 補丁后:新增計數控制intrkcif_sensor_set_power(structrkcif_stream *stream,inton){structrkcif_device *cif_dev = stream->cifdev;// 斷電:計數>0時減1,未到0則不執行斷電if(!on&& atomic_dec_if_positive(&cif_dev->sd_power_cnt))return0;// 上電:計數+1后>1,說明已有模塊使用,不重復上電if(on&& atomic_inc_return(&cif_dev->sd_power_cnt) >1)return0;// 僅滿足“首次上電”或“最后一次斷電”,才操作Sensor電源if(cif_dev->terminal_sensor.sd)v4l2_subdev_call(..., core, s_power,on);return0;}
?修改2:調整open/release中函數調用時機
將rkcif_sensor_set_power從“解鎖后”移到“鎖內”,確保并發安全:
// open函數:鎖內調用,避免并發計數錯亂staticintrkcif_fh_open(...){mutex_lock(&cifdev->stream_lock);ret = rkcif_sensor_set_power(stream,on);// 補丁后:鎖內調用mutex_unlock(&cifdev->stream_lock);}// release函數:先斷電計數,再釋放資源staticintrkcif_fh_release(...){mutex_lock(&cifdev->stream_lock);ret = rkcif_sensor_set_power(stream,on);// 補丁后:鎖內調用v4l2_pipeline_pm_put(...);// 后釋放資源mutex_unlock(&cifdev->stream_lock);}
(2)dev.c:初始化計數變量(路徑:
drivers/media/platform/rockchip/cif/dev.c)
在rkcif_plat_init中新增sd_power_cnt初始化,確保計數從0開始:
atomic_set(&cif_dev->power_cnt,0);atomic_set(&cif_dev->streamoff_cnt,0);atomic_set(&cif_dev->sensor_off,1);atomic_set(&cif_dev->sd_power_cnt,0); // 補丁新增:初始化Sensor電源計數
(3)dev.h:聲明變量與函數(路徑:
drivers/media/platform/rockchip/cif/dev.h)
?新增sd_power_cnt到struct rkcif_device:
structrkcif_device{atomic_t power_cnt;atomic_t streamoff_cnt;atomic_t sensor_off;atomic_t sd_power_cnt;// 補丁新增:Sensor電源引用計數// ... 其他成員};
?聲明rkcif_sensor_set_power函數(因函數從static改為全局):
intrkcif_sensor_set_power(structrkcif_stream *stream,inton);// 補丁新增
(4)subdev-itf.c:補全調用路徑(路徑:drivers/media/platform/rockchip/cif/subdev-itf.c)
在sditf_s_power中調用rkcif_sensor_set_power,確保該路徑納入計數管理:
staticintsditf_s_power(...){// ... 原有邏輯if(on) {pm_runtime_get_sync(cif_dev->dev);ret |= rkcif_sensor_set_power(&cif_dev->stream[0],on);// 補丁新增}else{pm_runtime_put_sync(cif_dev->dev);ret |= rkcif_sensor_set_power(&cif_dev->stream[0],on);// 補丁新增}// ... 原有邏輯}
4.修復價值:從“隱患”到“穩定”
?解決功能異常:多模塊共用Sensor時,避免“一個模塊退出導致整體崩潰”(如預覽退出后錄像仍正常)。
?保護硬件壽命:避免重復上電導致Sensor電源模塊過熱,延長硬件壽命。
?符合V4L2規范:遵循“按需開關電源”的框架要求,提升驅動兼容性。
四、總結:驅動架構與補丁的啟示
Rockchip CIF驅動通過“模塊化設計”實現了功能解耦——dev.c管全局、subdev-itf.c管交互、capture.c管執行、procfs.c管調試,這種架構既便于維護,又能靈活擴展(如新增HDR模式)。
而本次補丁則體現了內核驅動開發的核心原則:
1.資源管理需“計數”:多模塊共享的資源(如Sensor電源),必須通過引用計數跟蹤使用狀態。
2.并發操作需“鎖保護”:關鍵邏輯(如計數修改)必須在互斥鎖內執行,避免并發錯亂。
3.調用路徑需“全覆蓋”:確保所有觸發點都經過統一邏輯,不遺漏任何場景。
對于嵌入式開發者而言,理解驅動架構是定位問題的基礎,而補丁的修復思路則為“資源管理類問題”提供了通用參考——小到電源計數,大到內存管理,核心都是“清晰跟蹤狀態、規范操作流程”。
若你的設備基于Rockchip芯片且使用Kernel 6.1,建議及時合入該補丁,為攝像頭穩定運行保駕護航~
-
嵌入式
+關注
關注
5198文章
20442瀏覽量
333972 -
Linux
+關注
關注
88文章
11758瀏覽量
219006 -
Rockchip
+關注
關注
0文章
92瀏覽量
19577
發布評論請先 登錄
【WEBENCH 大賽作品】WEBENCH FPGA 電源架構設計
【原創】Dex分包架構設計—實現安卓熱修復
tvp5158 D1+3CIF metadata怎么解析
rockchip-isp1驅動程序和rockchip SoC上圖像信號處理模塊的基本信息介紹
瑞芯微系列芯片的CIF和ISP的新驅動結構及開發指南資料免費下載

蘋果重新發布補丁用于修復iOS越獄的漏洞
深度:嵌入式系統的軟件架構設計!資料下載

架構與微架構設計
GPU架構深度解析





 工商網監
工商網監
評論