") 基于Linux平臺上S3C2440的物流配送系統(tǒng)設計
基于Linux平臺上S3C2440的物流配送系統(tǒng)設計

現(xiàn)代的物流系統(tǒng)已經(jīng)進入了信息化的階段。信息化配送系統(tǒng)對信息化物流有著重要的影響。隨著計算機科學和自動化技術的發(fā)展,物流管理系統(tǒng)也從簡單的方式迅速向自動化管理演變,其主要標志是自動物流設備,如自動導引車(AGV-Automated guided vehicle)、自動存儲、提取系統(tǒng)(AS/RS-Automated storage/retrieve system)、空中單軌自動車(SKY-RAV-Rail automated vehicle)、堆垛機(Stacker crane)等,及物流計算機管理與控制系統(tǒng)的出現(xiàn)。物流系統(tǒng)的主要目標在于追求時間和空間效益。
物流系統(tǒng) 是由物流各要素所組成的,物流各要素之間是存在有機聯(lián)系的綜合體,物流系統(tǒng)主要受內(nèi)部環(huán)境以及外部環(huán)境的要素影響,使物流系統(tǒng)整體構成十分復雜,其外部存在過多的不確定因素,其內(nèi)部存在著相互依賴的物流功能因素。
1 相關核心技術概述
1.1 移動定位技術
目前的移動定位技術已經(jīng)非常成熟,最主要的有3類:
①利用衛(wèi)星進行后方交匯的定位技術,是由美國建立的一個衛(wèi)星導航定位系。GPS功能必須具備GPS終端、傳輸網(wǎng)絡和監(jiān)控平臺三個要素,這三個要素缺一不可。通過這三個要素,可以提供車輛防盜、反劫、行駛路線監(jiān)控及呼叫指揮等功能。利用該系統(tǒng),用戶可以在全球范圍內(nèi)實現(xiàn)全天候、連續(xù)、實時的三維導航定位和測速;另外,還能夠進行高精度的時間傳遞和精密定位。
②利用移動通信技術提供位置服務的定位技術,即Cell-ID(Cell Identification,小區(qū)識別碼),Cell ID實現(xiàn)定位的基本原理:即無線網(wǎng)絡上報終端所處的小區(qū)號(根據(jù)服務的基站來估計),位置業(yè)務平臺把小區(qū)號翻譯成經(jīng)緯度坐標。這種方法實現(xiàn)簡單,無需在無線接入網(wǎng)側(cè)增加設備,對網(wǎng)絡結構改動小,缺點是定位精度低,在市區(qū)一般可以達到300-500m,郊區(qū)幾公里。Cell-ID方式在城市及人口密集區(qū)域能提供相對高的精度,與GPS在城市高層建筑、林蔭道、地下隧道等遮蔽情況下性能降低形成較好的互補。
③利用射頻設備記錄位置的定位技術,即RFID(Radio Frequency Identification,射頻識別)。通過讀取用于標識地理坐標的標簽數(shù)據(jù)來獲取定位信息。其定位精度僅取決于標簽存儲定位信息的精確性,理論上可以達到任意高精度。RFID可用于倉庫、碼頭等需要高精度定位信息的場所,來提供定位信息和其他輔助功能。RFID現(xiàn)在廣泛用于公交報站系統(tǒng),公交車上的設備檢測到站點的射頻設備后就自動報站。
1.2 移動終端通信技術
目前,常用的移動終端技術主要包括藍牙技術、GPRS接入互聯(lián)網(wǎng)技術、構筑在GPRS基礎上的無線數(shù)據(jù)傳輸技術等。
藍牙技術是一種無線數(shù)據(jù)與語音通信的開放性全球規(guī)范,它以低成本的近距離無線連接為基礎,為固定與移動設備通信環(huán)境建立一個特別連接。藍牙采用分散式網(wǎng)絡結構以及快跳頻和短包技術,支持點對點及點對多點通信,工作在全球通用的2.4 GHz ISM(即工業(yè)、科學、醫(yī)學)頻段。其數(shù)據(jù)速率為1 Mbps,采用時分雙工傳輸方案實現(xiàn)全雙工傳輸。
GPRS技術是一種新的GSM數(shù)據(jù)業(yè)務,它可以給移動用戶提供無線分組數(shù)據(jù)接入服務。GPS接收機對收到的衛(wèi)星信號,進行解碼或采用其它技術,將調(diào)制在載波上的信息去掉后,就可以恢復載波。嚴格而言,載波相位應被稱為載波拍頻相位,它是收到的受多普勒頻 移影響的衛(wèi)星信號載波相位與接收機本機振蕩產(chǎn)生信號相位之差。一般在接收機鐘確定的歷元時刻量測,保持對衛(wèi)星信號的跟蹤,就可記錄下相位的變化值,但開始觀測時的接收機和衛(wèi)星振蕩器的相位初值是不知道的,起始歷元的相位整數(shù)也是不知道的,即整周模糊度,只能在數(shù)據(jù)處理中作為參數(shù)解算。
2 系統(tǒng)設計
2.1 物流配送系統(tǒng)模塊設計
物流配送系統(tǒng)物理結構設計如圖1所示。
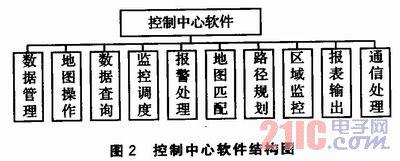
2.2 物流配送控制
中心的功能設計控制中心由GPRS/GSM通信服務器、GIS服務器、Web服務器、地圖數(shù)據(jù)庫服務器、業(yè)務服務器組成,通過路由器連接至Internet。GPRS/GSM通信服務器處理與各個終端之間的一對多雙向數(shù)據(jù)通信;GIS服務器主要實現(xiàn)電子地圖的功能,并負責地圖數(shù)據(jù)的傳輸;Web服務器則是將電子地圖和各目標信息結合起來,為控制用戶提供監(jiān)控界面;地圖數(shù)據(jù)庫和業(yè)務數(shù)據(jù)庫分別存儲電子地圖數(shù)據(jù)和監(jiān)控業(yè)務數(shù)據(jù)。
結構圖如圖2所示。
2.3 移動終端的硬件設計
現(xiàn)代的移動終端已經(jīng)擁有極為強大的處理能力(CPU主頻已經(jīng)接近1G)、內(nèi)存、固化存儲介質(zhì)以及像電腦一樣的操作系統(tǒng)。是一個完整的超小型計算機系統(tǒng)。可以完成復雜的處理任務。移動終端也擁有非常豐富的通信方式,即可以通過GSM,CDMA,EDGE,3G等無線運營網(wǎng)通訊,也可以通過無線局域網(wǎng),藍牙和紅外進行通信。
這些操作均利用GPRS無線網(wǎng)絡以Web Service的方式實現(xiàn)。
基于S3C2440的移動終端硬件設計如圖3所示。S3C2440模塊(包括各種硬件接口及嵌入式Linux軟件等)負責對GPS信號的接收處理、視圖顯示及對數(shù)據(jù)的處理。從GPS模塊中獲取定位數(shù)據(jù),從RFID模塊與CellID模塊獲得更詳細的定位信息作為補充,然后將位置信息通過GPRS發(fā)送給控制中心。實現(xiàn)終端和控制中心的信息上傳和下傳功能。

RFID模塊主要負責對當前物流載體的數(shù)據(jù)采集,以獲得RFID定位信息,并將采集到的RFID信息通過藍牙模塊傳輸給S3C2440。GPS模塊根據(jù)衛(wèi)星定位獲得當前位置信息,同樣通過藍牙模塊進行傳輸(如距離比較近,也可以有線傳輸)。Cell-ID模塊主要通過無線數(shù)據(jù)傳輸獲得定位信息,然后通過GPRS模塊傳輸給中心控制器。LCD模塊主要提供人機交互的功能,除了顯示屏外還需配備鍵盤等輸入設備,或者直接采用液晶屏。存儲器模塊除了擴展的片外RAM外,還需給嵌入式數(shù)據(jù)庫提供一定的存儲空間。
2.4 軟件設計
2.4.1 軟件總體設計
如圖4所示,按照功能可以將軟件分為以下4部分。
①用戶界面。要實現(xiàn)一個友好的用戶界面,以便用戶在S3C2440 LCD屏上直觀地獲得圖文并茂的信息,以及選擇服務功能和輸入信息。
②地圖數(shù)據(jù)處理。主要實現(xiàn)電子地圖的數(shù)據(jù)組織、地圖顯示、地圖標圖功能、定位導航功能,便于用戶使用地理信息的服務功能。終端處理的數(shù)據(jù)包括GPS數(shù)據(jù)、GIS數(shù)據(jù)、文本數(shù)據(jù)、多媒體數(shù)據(jù)。
③GPS通信模塊。S3C2440模塊通過藍牙與GPS模塊相連接,對接收到的GPS數(shù)據(jù)進行處理,才能得到所需要的定位信息(比如經(jīng)緯度數(shù)據(jù)等)。利用籃牙進行串口通信的編程,包括打開串口、配置串口、發(fā)送接收數(shù)據(jù)、關閉串口4個步驟。
④GPRS通信模塊。利用GPRS無線物流在S3C2440和控制中心之間進行雙向通信。本文采用WebService的方式來進行。
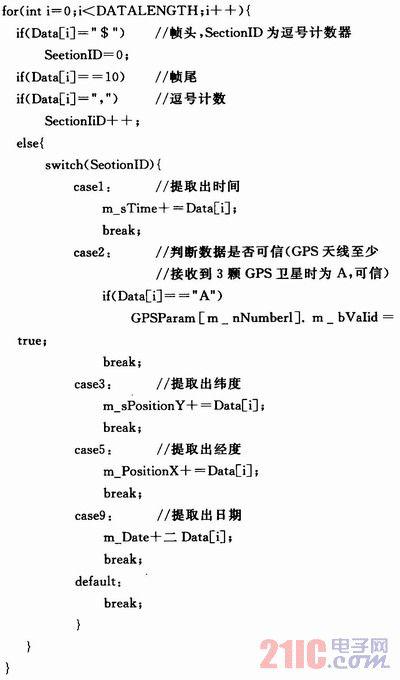
2.4.2 GPS與RFID數(shù)據(jù)提取
GPS接收機只要處于工作狀態(tài),就會源源不斷地把接收并計算出的GPS導航定位信息通過串口傳送到計算機中。從串口接收數(shù)據(jù)后將其放置于緩存內(nèi),在沒有進一步處理之前緩存中是一長串字節(jié)流,這些信息在沒有經(jīng)過分類提取之前是無法加以利用的。因此,必須通過程序?qū)⒏鱾€字段的信息從緩存字節(jié)流中提取出來,將其轉(zhuǎn)化成有實際意義的、可供使用的定位信息數(shù)據(jù)。從“$G-PRMC”幀中獲取定位數(shù)據(jù)的代碼如下:
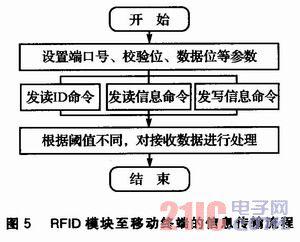
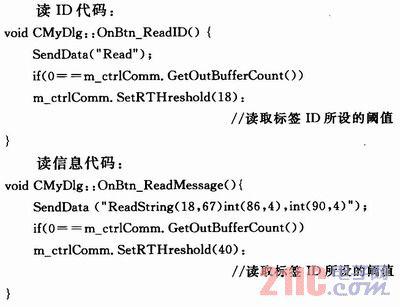
RFID模塊通過串口將信息傳輸至移動終端,信息傳輸流程如圖5所示。當接收緩沖區(qū)內(nèi)字節(jié)個數(shù)達到或者超過該值后就取出數(shù)據(jù)并對相應事件進行處理。程序設計的主要任務是:讀出標簽ID信息(讀ID命令);向標簽寫入存放在數(shù)據(jù)庫中的數(shù)據(jù)信息(寫信息);讀取標簽中寫入的數(shù)據(jù)信息,查詢數(shù)據(jù)庫以得到具體的產(chǎn)品信息(讀信息);實時顯示讀標簽信息的結果。
2.4.3 移動終端S3C2440模塊軟件設計
模塊化結構設計,根據(jù)不同功能分別進行編寫和調(diào)試,等到各個模塊都調(diào)試成功后,將各個模塊連成整體,組成軟件系統(tǒng)。
終端S3C2440模塊完成的主要內(nèi)容包括兩部分:
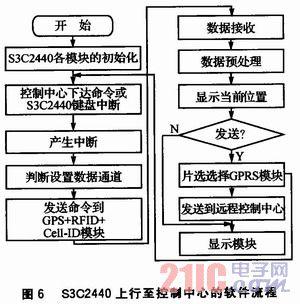
成從移動終端到遠程控制中心的定位信息的上行傳輸。當遠程控制中心要從移動終端獲取定位信息時,可以發(fā)送命令給S3C2440。這時S3C2440便產(chǎn)生一個中斷,并發(fā)送命令給各定位模塊來獲取定位信息,將定位信息進行處理后再通過GPRS模塊傳給遠程控制中心;或者是移動終端由人員鍵盤控制產(chǎn)生中斷,然后采集定位信息傳送給遠程控制中心。
收控制中心到移動終端的下行傳輸?shù)男畔ⅰ?刂浦行目梢詫⒏鞣N數(shù)據(jù)傳送給終端設備。比如,控制中心通過GIS發(fā)現(xiàn)當前移動終端所選道路擁塞,則可以給移動終端發(fā)一條改變路線的建議信息,這樣非常方便地實現(xiàn)了遠程控制中心與移動終端的交互。
C2440上行至控制中心的軟件設計主要流程如圖6所示。
結語
本文以GPS定位數(shù)據(jù)為基礎,GPRS網(wǎng)絡作為承載網(wǎng)絡,結合物流業(yè)發(fā)展實際需要,將物流配送過程數(shù)字化與信息化,實現(xiàn)了對物流配送系統(tǒng)的監(jiān)控與管理。射頻識別技術、定位技術、傳感器技術以及無線通信技術在未來必將深入到物流業(yè)的各個方面。
參考文獻:
[1].GPRSdatasheethttp://www.dzsc.com/datasheet/GPRS_1594650.html.
[2].S3C2440datasheethttp://www.dzsc.com/datasheet/S3C2440_589562.html.
:
-
cpu
+關注
關注
68文章
11277瀏覽量
224955 -
GPRS
+關注
關注
21文章
986瀏覽量
133092 -
S3C2440
+關注
關注
4文章
132瀏覽量
40093
發(fā)布評論請先 登錄
u-blox PointPerfect Flex為認證無人機配送平臺進行定位
如何在Zynq UltraScale+ MPSoC平臺上通過JTAG啟動嵌入式Linux鏡像
天數(shù)智算物流與環(huán)衛(wèi)無人機器人解決方案:重構物流與環(huán)衛(wèi)新秩序?

???????京東API:開啟電商物流新速度,訂單配送快人一步!

超高頻讀寫器 UHF數(shù)據(jù)采集器選型:讀寫距離 / 耐用性參數(shù)解析

CES Asia 2025蓄勢待發(fā),聚焦低空經(jīng)濟與AI,引領未來產(chǎn)業(yè)新變革
低空物流:無人機開啟未來配送新篇章
曙光云助力鄂爾多斯市車路云一體化建設
鑫澈電子導熱界面材料助力低空裝備高效散熱
低空物流:無人機開啟未來配送新篇章
福田汽車800V高壓平臺技術打造綠色物流運輸新體驗
安富利基于恩智浦S32G汽車網(wǎng)絡處理器開發(fā)的eVTOL飛控系統(tǒng)解決方案

在任何平臺上使用PetaLinux的先決條件

SR800-02雙模雙卡5G+4G路由器應用場景

NN3-12S24C3N NN3-12S24C3N




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論