 CANoe與Simulink聯合仿真編譯失敗
CANoe與Simulink聯合仿真編譯失敗

問題描述:
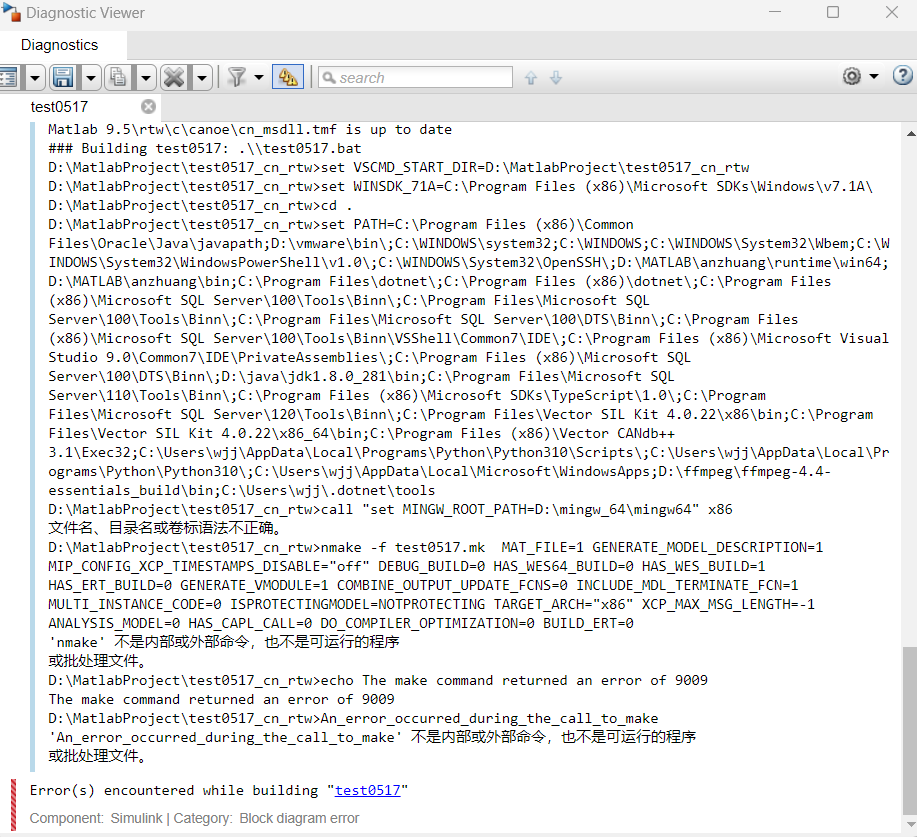
在使用VS作為編譯器的情況下,Matlab編譯后失敗,如下圖:
解決方案:
原因:安裝VS時,Windows的SDK版本未安裝或者安裝選項沒有選擇正確。
1.打開VS,可以看到VS中的錯誤提示:

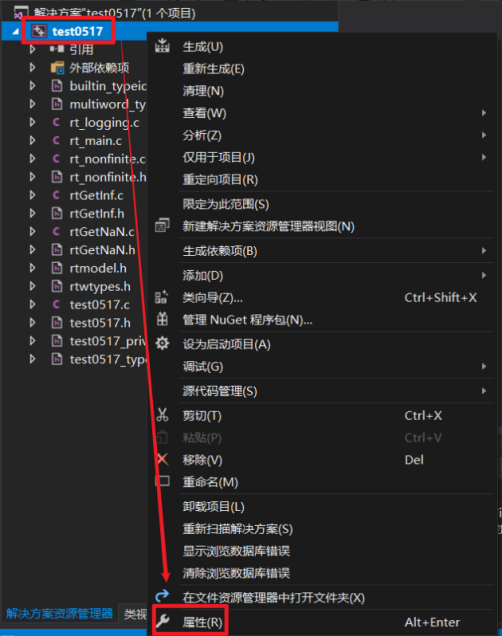
2.打開此項目的屬性設置:
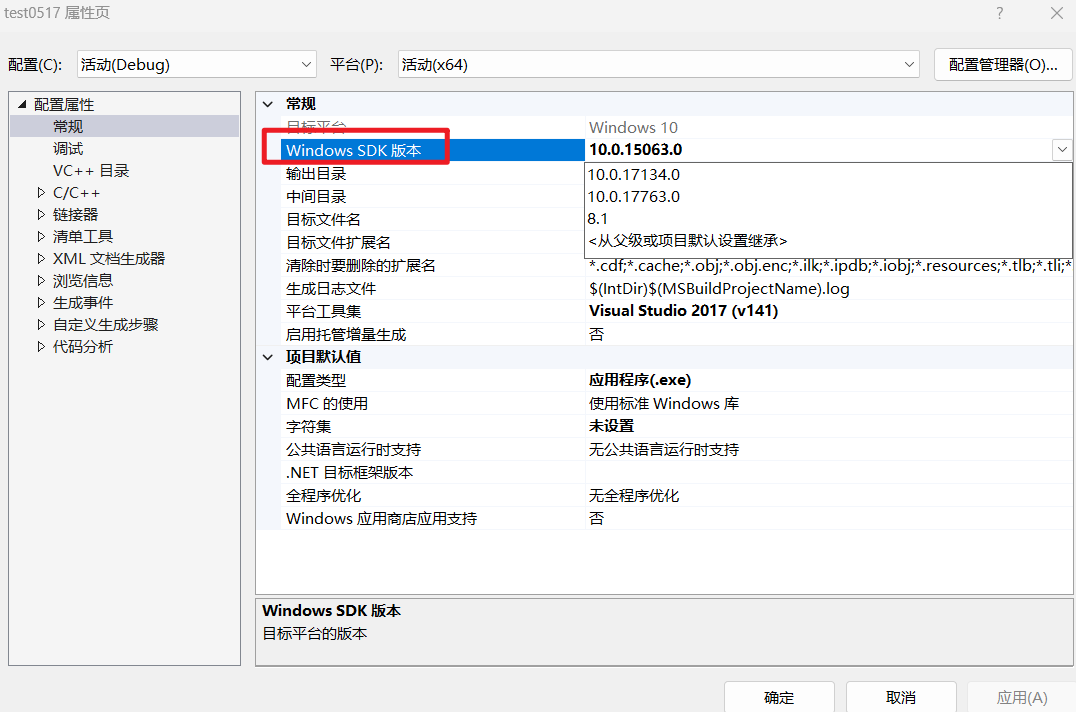
3.選擇正確的SDK版本
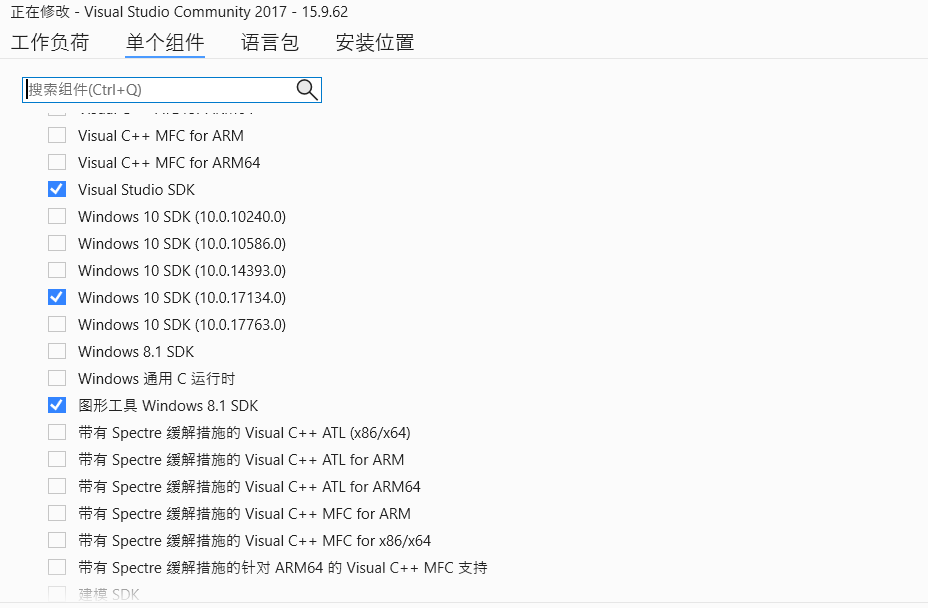
4.選擇修改

5.重新安裝SDK
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
Simulink
+關注
關注
23文章
552瀏覽量
66224 -
編譯器
+關注
關注
1文章
1672瀏覽量
51769 -
CANoe
+關注
關注
4文章
85瀏覽量
9822
發布評論請先 登錄
相關推薦
熱點推薦
關于ORCAD16.3與SIMULINK聯合仿真
各位大俠,我想使用ORCAD16.3與simulink聯合仿真,但我找不到接口軟件SLPS,現在網上能找到的為SLPSV2.65,但它好象只能為SPB15.5.1版本服務,所以請哪位大俠能提供16.3與
發表于 05-05 23:07
modelsim和simulink聯合仿真問題
我在做聯合仿真的時候modelsimn里面總是出不來輸出變量,有輸入變量和時鐘信號,但就是沒有SOUT,simulink報錯總是。 VERILOG程序很簡單,應該沒有問題,程序如下: module
發表于 09-24 13:44
LabView SIT工具包和Simulink聯合仿真的問題
看了很多的技術帖子,labview編寫界面比較方便,simulink做控制較好,所以現在想把他們聯合起來,按照以下的一些帖子:使用LabView SIT工具包鏈接Simulink模型的方法https
發表于 11-19 15:15
Labview和simulink做聯合仿真
最近在用Labview和simulink做聯合仿真,但是和signal builder進行參數映射的時候總是出現無效映射,有誰知道這是什么原因嗎?請高人解答一下,灰常感謝!!!
發表于 12-21 19:10
一個菜鳥求助labview與simulink的聯合仿真步驟?謝謝!
一個菜鳥求助labview與simulink的聯合仿真步驟?謝謝!老師給了一個電動機的電路圖讓用labview和simulink進行檢測,實在不知道怎么辦?
發表于 12-22 11:37
求大神幫忙啊, labview2017或者2016如何與simulink進行聯合仿真呢
求大神幫忙啊labview2017或者2016如何與simulink進行聯合仿真呢
發表于 12-22 14:02
最新版的labview2018能與simulink創造的slx文件聯合仿真嗎?求大佬教我
使用MATLAB的simulink建立模型需要在在labview上進行改變參數得到波形,但是在網上找了只找到說以前13以前版本的labview可以通過SIT插件聯合仿真,另外的查不到什么信息,是之后的版本無法做到
發表于 04-12 15:42
永磁同步電機與機械臂的聯合simulink仿真
前言:有個把月沒更新博客了,一是有點忙,二來也不是特別想寫博客。上個月主要是在搭建永磁同步電機和機械臂聯合仿真的模型,最后仿真效果還算良好,應該算完成了。永磁同步電機與機械臂的聯合
發表于 08-30 06:31
simulink和pspice聯合仿真問題
根據網上的資料操作,已可以再simulink中調用pspice中的模型,但是出現仿真錯誤如下:
網上查到的解決方案并沒有解決我的問題,有沒有人可以幫我看看呀,或者您的聯合仿真是通過什么
發表于 05-23 15:04
CANoe Matlab聯合仿真在DCT總線控制中的應用
提出了電動干式雙離合器轎車的整車綜合控制策略。采用CANoe-Matlab 聯合仿真的方法建立了帶有DCT 系統的整車模型,并對其CAN 網絡進行仿真;向CAN 總線收發DCT 換擋過
發表于 03-27 15:39
?39次下載

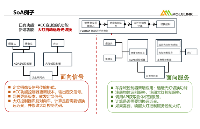
淺談CANoe實現SOA仿真測試
本文介紹怎么通過我們CANoe工具去實現SOA的相關功能。CANoe Communication Setup功能為實現SOA模型的交互和模型測試提供了全新的接口。用戶可以通過CANoe更加靈活地實現面向服務架構的



 工商網監
工商網監
評論